






👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
多旋翼物流无人机的节能轨迹规划是一项重要的技术,可以有效减少无人机的能量消耗,延长飞行时间,提高物流效率。下面是一些常见的节能轨迹规划方法:
-
最短路径规划:通过寻找起点和终点之间的最短路径,减少飞行距离,从而节省能量消耗。可以使用经典的最短路径算法如Dijkstra算法和A*算法来实现。
-
动态路径规划:考虑当前环境的动态变化,比如风速、天气状况和地形高度等因素,并实时优化飞行路径。这样可以避免飞行过程中遭受很大的阻力,从而减少能量消耗。
-
高效充电站布置:合理规划充电站的位置,使得无人机在物流任务执行过程中可以方便地进行补充能量。这样无人机可以减少回程飞行距离,节省能量。
-
光伏充电:在无人机上安装太阳能电池板,通过太阳能充电来提供能源。这种方式可以减少对传统电力的依赖,减少碳排放。
-
多机协同飞行:通过与其他物流无人机进行协同飞行,在空中形成集群,减少空气阻力,提高整体能源利用效率。
节能轨迹规划为多旋翼物流无人机提供了较大的优化空间,通过合理规划飞行路径、优化充电策略以及使用新能源技术,可以显著减少能量消耗,提高物流效率。
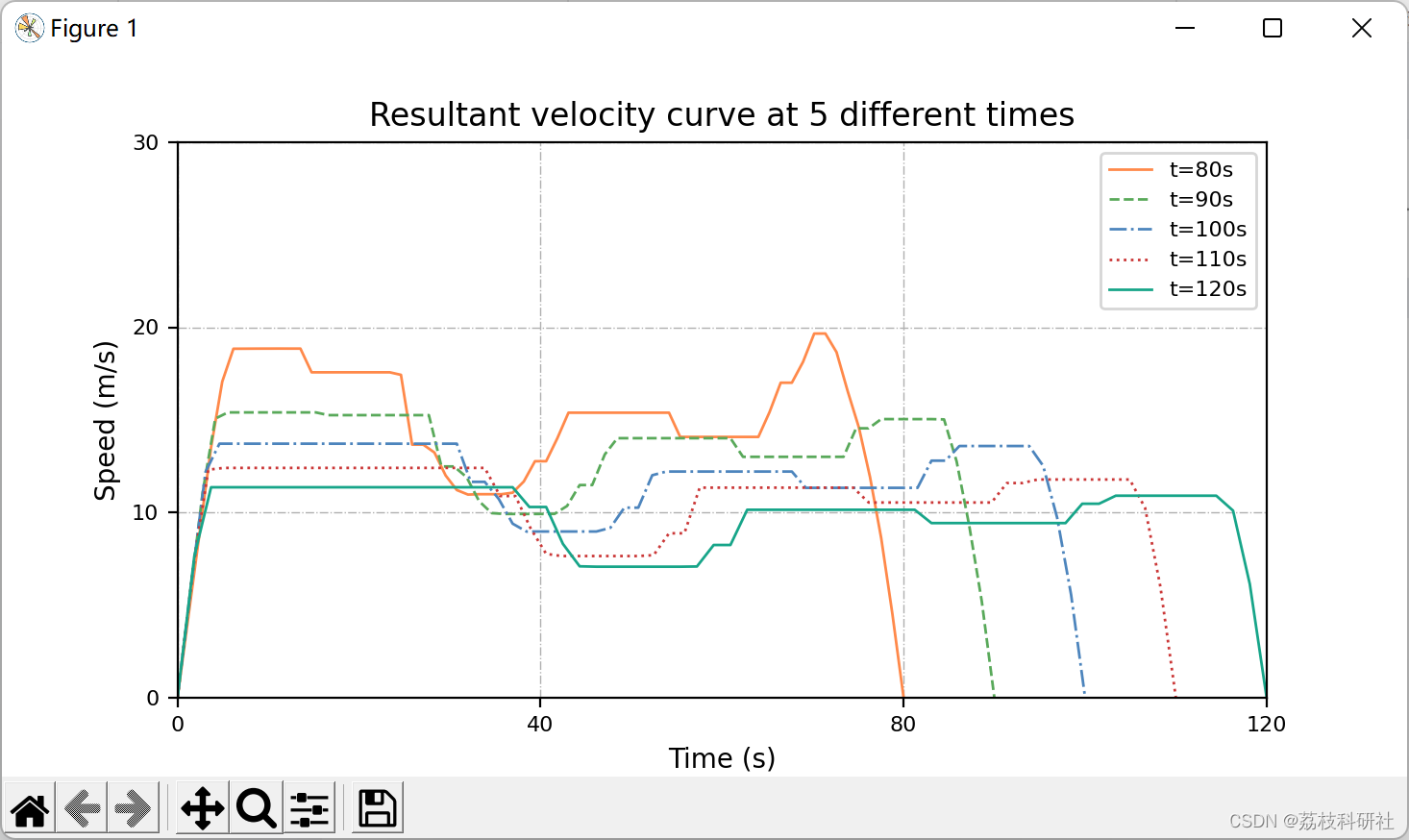
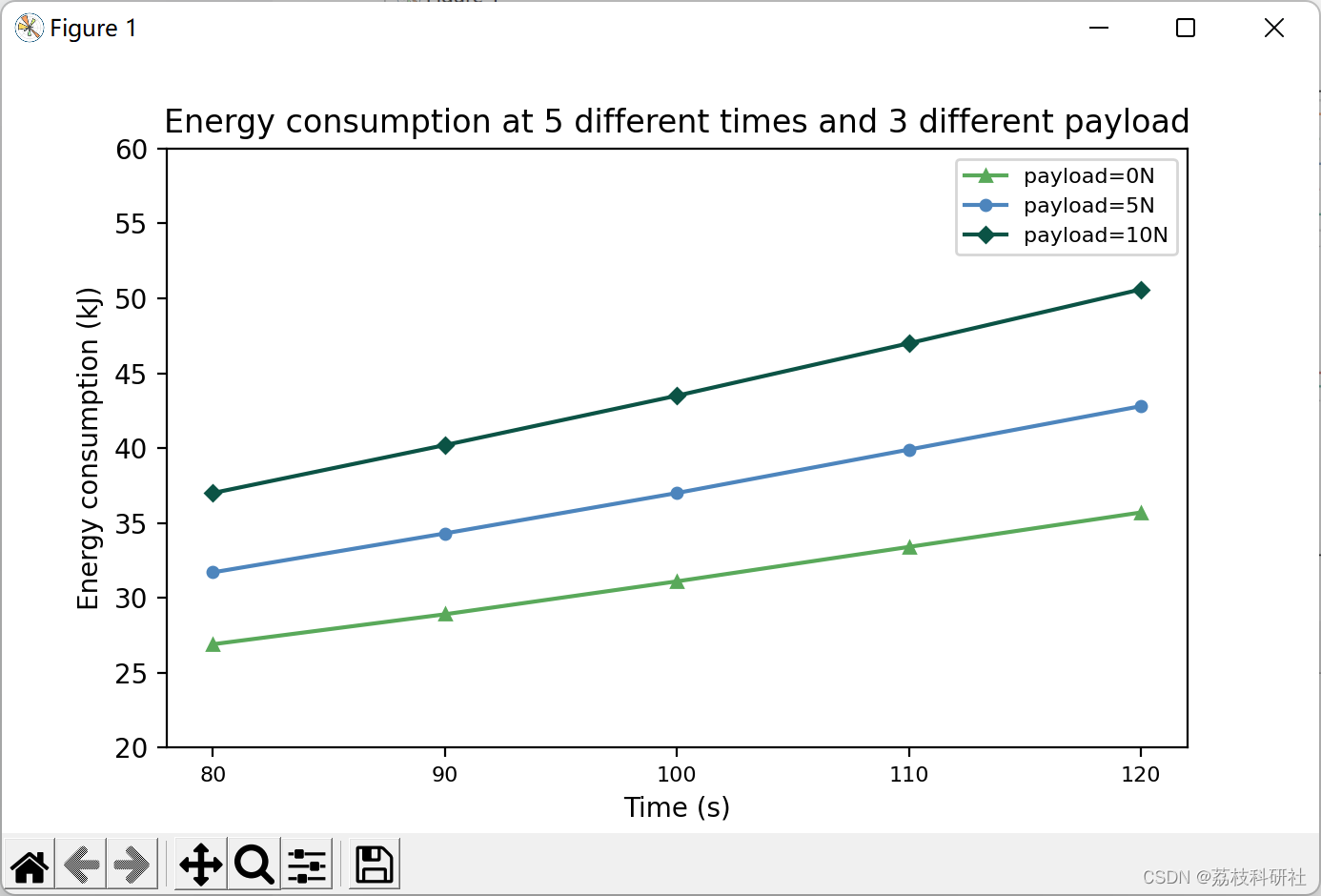
本文考虑静态环境下无人机轨迹轨迹的可行性和能耗特性。
多旋翼物流无人机作为现代智能物流系统的重要组成部分,其高效、精确的飞行轨迹规划不仅关系到包裹配送的时效性,还直接影响到无人机的能量消耗与续航能力,进而影响整体运营成本与环境友好度。因此,开展多旋翼物流无人机节能轨迹规划的研究具有极其重要的实践与理论价值。
研究背景
随着电子商务的蓬勃发展和“最后一公里”配送难题的凸显,无人机物流因其快速响应、灵活机动等优点成为了解决方案之一。然而,多旋翼无人机在携带货物飞行时,其能源消耗较大,尤其在面临复杂多变的气象条件、城市复杂的地形环境以及飞行过程中各种不确定因素时,如何设计一条既能保障安全准时送达,又能最大程度减少能耗的飞行路径,成为了研究的焦点。
研究目标
- 最小化能耗:开发一套基于动态飞行模型的节能飞行策略,考虑风阻、重力等因素对能耗的影响,优化飞行高度、速度及航向,以减少电池消耗。
- 确保安全:在节能的基础上,确保飞行路径避开禁飞区、人口稠密区和气象恶劣区,同时遵守空域管理规则。
- 提高效率:综合考虑订单需求的时间窗约束,优化飞行序列,减少等待时间和绕行,提升物流效率。
- 灵活性与适应性:设计的轨迹规划算法应具有良好的在线调整能力,能够根据实时气象数据、交通状况等动态调整飞行计划。
技术方法
- 模型建立:建立考虑多旋翼无人机动力学特性、气动阻力及负载效应的飞行能耗模型。
- 优化算法:采用混合整数线性规划、遗传算法、粒子群优化、强化学习等先进算法,寻求能耗与飞行时间之间的最优平衡。
- 环境感知与预测:集成GPS、气象传感器、地理信息系统(GIS)等技术,实时获取飞行环境信息,并预测未来一段时间的天气变化,为路径规划提供依据。
- 机器学习:利用历史飞行数据训练模型,预测飞行过程中的能耗,进一步优化路径规划策略。
实验验证与案例分析
通过仿真平台模拟不同环境条件下的飞行任务,对比传统路径规划与节能轨迹规划方案在能耗、飞行时间、安全性和客户满意度等方面的性能指标。同时,选取典型物流配送案例,进行实地测试验证,收集飞行数据,持续优化算法模型。
结论与展望
多旋翼物流无人机节能轨迹规划的研究不仅能够有效降低运营成本,提升无人机物流系统的可持续性,还能够促进智能物流技术的革新与发展。未来,随着人工智能、大数据技术的不断进步,轨迹规划算法将更加智能化、个性化,更好地服务于智慧城市的构建与绿色物流的发展。
📚2 运行结果
部分代码:
def VelDataAboutTime():
blocks = []
b1 = Block(0, 0, 0, 150, 200, 200) # (x1, y1, z1, x2, y2, z2)
b2 = Block(100, 150, 120, 300, 400, 450) # (x1, y1, z1, x2, y2, z2)
b3 = Block(250, 350, 400, 500, 480, 500) # (x1, y1, z1, x2, y2, z2)
b4 = Block(420, 220, 200, 650, 400, 450) # (x1, y1, z1, x2, y2, z2)
b5 = Block(550, 80, 150, 650, 400, 300) # (x1, y1, z1, x2, y2, z2)
b6 = Block(600, 80, 50, 800, 150, 200) # (x1, y1, z1, x2, y2, z2)
blocks.append(b1)
blocks.append(b2)
blocks.append(b3)
blocks.append(b4)
blocks.append(b5)
blocks.append(b6)
block2Ds = []
for b in blocks:
block2Ds.append(Block2D(b.x1, b.y1, b.x2, b.y2))
goal = [800, 100, 60]
c_x = [] # 每段 (x1, x2)
c_y = [] # 每段 (y1, y2)
c_z = [] # 每段 (z1, z2)
corridor = []
for block in blocks:
c_x.append([block.x1, block.x2]) # 提取出每一段的 (x1,x2)
c_y.append([block.y1, block.y2]) # 提取出每一段的 (y1,y2)
c_z.append([block.z1, block.z2]) # 提取出每一段的 (z1,z2)
corridor.append(c_x)
corridor.append(c_y)
corridor.append(c_z)
time = [
[13, 21, 9, 12, 12, 13],
[16, 23, 10, 13, 13, 15],
[18, 25, 11, 15, 15, 16],
[20, 27, 13, 16, 16, 18],
[22, 29, 14, 18, 18, 19]
]
# time = [13, 21, 9, 12, 12, 13] # 80 2.68677585e+04
# time = [16, 23, 10, 13, 13, 15] # 90 2.88795396e+04
# time = [18, 25, 11, 15, 15, 16] # 100 3.10684295e+04
# time = [20, 27, 13, 16, 16, 18] # 110 3.33565508e+04
# time = [22, 29, 14, 18, 18, 19] # 120 3.57001138e+04
for i in range(5):
print("============================================")
energy, power, s, vel = UAV3D(time[i], goal, corridor)
print(energy)
""" save vel to excel """
vel_x = list(np.array(vel[0]).flatten())
vel_y = list(np.array(vel[1]).flatten())
vel_z = list(np.array(vel[2]).flatten())
for index in range(len(vel_x)):
velocity = math.sqrt(vel_x[index] ** 2 + vel_y[index] ** 2 + vel_z[index] ** 2)
CVXsheet.write(index, i, velocity)
workbook.save('Velocity.xls')
def plot_blocks(blocks):
plt.figure(1)
ax = plt.axes(projection='3d')
ax.set_xlabel('X(m)')
ax.set_ylabel('Y(m)')
ax.set_zlabel('Z(m)')
# ax.set_xticks(np.linspace(0, 100, 4))
# ax.set_yticks(np.linspace(0, 100, 4))
# ax.set_zticks(np.linspace(0, 100, 4))
ax.set_xlim(0, 1000)
ax.set_ylim(0, 1000)
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]陈雯雯.小型四旋翼无人机轨迹规划算法研究[D].青岛理工大学,2015.DOI:10.7666/d.Y2818815.
[2]王凯平.复杂城市空间环境中的无人机轨迹规划方法与应用研究[J].[2024-07-03].
[3]吴成振,孙大运.多约束条件下的无人机轨迹快速规划[J].农业装备与车辆工程, 2021.DOI:10.3969/j.issn.1673-3142.2021.03.028.















 1451
1451

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









