






对一堆无序摆放的工件进行扫描 获取其3d点云图像

通过halcon预处理提取待测面

首先要单独筛选出单个工件 创建3d点云模板文件

write_object_model_3d
对锁扣点云工件进行匹配定位的关键步骤
统一模板点云和场景点云的法线方向
重点算子
统一法线方向
smooth_object_model_3d
创建基于表面的3d模板点云 create_surface_model
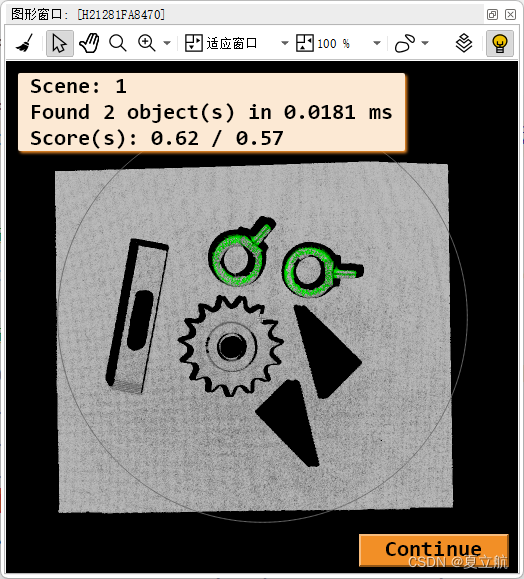
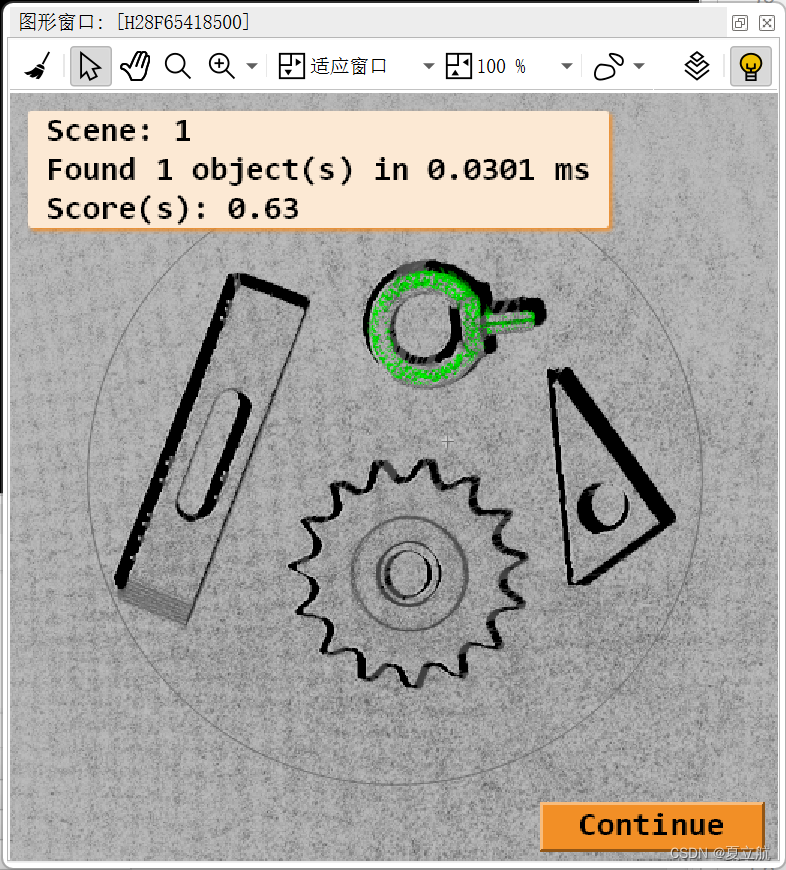
找模板 find_surface_model
创建模板和找模板中的两个参数 比较影响正确率
RelSamplingDistance 最大采样距离
KeyPointFraction 采样关键点
调整参数找到最好效果
最后达到同一高度下对不同摆放位姿的工件都能达到正确识别 并获取位姿信息
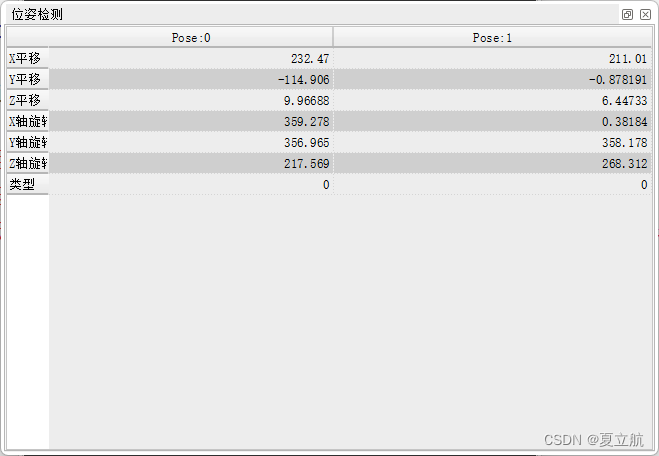

后续通过9点标定 图像坐标系和世界坐标系转换 配合机器手进行抓取















 2526
2526











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









