







对于动态规划类型的题目,可以从以下角度去思考问题
1. 状态表示
机器人在每一个网格节点的状态 dp[i][j] ,可以理解从 起始点 为走到 [i,j] ,一共有多少种方式;
2. 状态转移方程
结合题意,机器人只可以往下走或者往右走,那么其实可以这样来理解:
图中的 robot 的位置,只能从 位置1 和 位置2 过来,那么换一个角度思考,从 起始点 到 robot 的位置的路径数,其实就是 起始点 到 位置1 的路径数 + 起始点 到 位置2 的路径数;
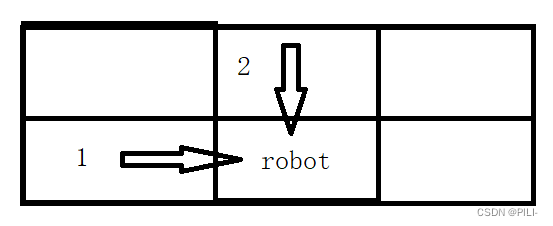
也就可以写成转换方程:dp[i][j] = dp[i-1][j] (起始点到位置2的路径数) + dp[i][j-1] (起始点到位置1的路径数)
3. 初始化
进行初始化表格,在这个步骤中,就需要去填入一些初始节点的对应值,为了防止越界;
比如按照上述的状态转移方程,此时就会有一些节点是会越界的:
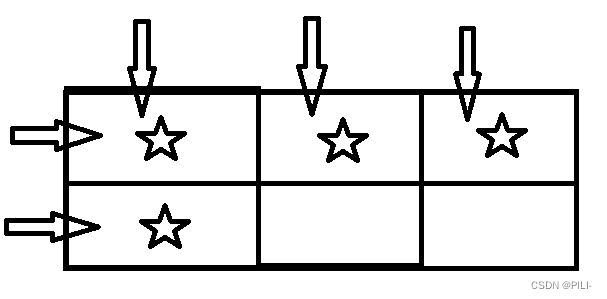
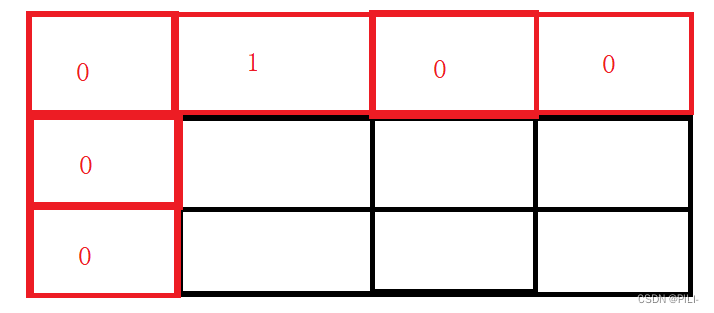
所以就是要去解决这些情况,而解决这个情况的方法也有两种:
1. 直接去把这几个节点的值给填上;
2. 扩充一下表,作为虚拟值;(下面讲的就是这种方式)
4. 填表顺序
这种情况就是按照从上往下,从左往右进行填表,具体根据情况分析;
5. 返回值
最后就返回需要返回的对应结果;
6. 代码
class Solution {
public int uniquePaths(int m, int n) {
int[][] p = new int[m+1][n+1];
p[0][1] = 1;
for(int i=1 ; i<=m ; i++){
for(int j=1 ; j<=n ; j++){
p[i][j] = p[i-1][j] + p[i][j-1];
}
}
return p[m][n];
}
}















 1972
1972

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











