






一、无人机介绍
无人机,全称无人驾驶飞机(Unmanned Aerial Vehicle,简称UAV),是一种没有机组人员搭载的飞行器。它通常由一套飞行控制系统和自主导航系统组成,可以通过遥控或预设的航行计划来进行飞行任务。从技术角度定义,无人机可以分为无人直升机、无人固定翼机、无人多旋翼飞行器、无人飞艇、无人伞翼机等几大类。
二、在视频和定位方面的应用
(一)带视频回传和卫星定位功能的无人机
带视频回传和定位的无人机是现代无人机技术的重要应用之一,它们结合了高清视频传输、精确定位以及强大的飞行能力,广泛应用于航拍、侦察、监控、搜救等多个领域。
(二)视频回传功能
1. 高清视频传输
无人机搭载高清摄像头,能够拍摄并实时传输高质量的视频画面。
采用先进的视频编码技术(如H.264、H.265等),确保视频数据在传输过程中的清晰度和流畅度。
支持远距离传输,部分高端无人机,采用O3图传技术,可以实现最远15公里的传输距离,并稳定回传1080p/60fps的视频。
2. 图传技术
无人机与遥控器或地面站之间通过专用的图传系统连接,确保视频信号的稳定传输。
部分无人机还支持5G视频回传,5G视频回传指挥中心,利用5G网络的高速和低延迟特性,进一步提升视频传输的效率和稳定性。
3. 实时监控与回放
用户可以通过遥控器或手机APP实时查看无人机拍摄的视频画面。
部分无人机还支持视频录制和回放功能,用户可以在飞行结束后查看和编辑拍摄的视频。
(三)定位功能
1. GPS定位
- 无人机内置GPS模块,能够实时接收卫星信号,提供准确的地理位置信息。
- GPS定位不仅有助于无人机在飞行过程中保持稳定和准确的方向控制,还能在紧急情况下实现一键返航功能。
2. 避障系统
- 许多高端无人机还配备了避障系统,通过红外传感器、超声波传感器或视觉传感器等装置,实时感知周围环境中的障碍物。
- 当无人机接近障碍物时,避障系统会自动调整飞行轨迹,避免发生碰撞。
3. 精确悬停
- 利用GPS和气压计等传感器,无人机能够实现精确的悬停功能,即使在风力较大的环境下也能保持稳定。
- 这对于拍摄稳定、清晰的视频画面至关重要。
(三)其他特点
1. 便携性
许多无人机采用可折叠设计,便于携带和运输。甚至可以轻松折叠成手掌大小。
2. 长续航
无人机搭载高性能电池,能够提供较长的续航时间。有的无人机在超强动能模式下可实现高达75公里/小时的飞行速度,有的拥有长达三十多分钟的续航时间。
3. 智能控制
无人机支持多种智能控制模式,如智能跟随、手势控制等,使飞行更加便捷和有趣。
三、无人机视频联网
(一)业务模式
带视频回传和定位的无人机通过结合高清视频传输、精确定位以及强大的飞行能力,为用户提供了丰富的应用场景和便捷的使用体验。无论是航拍爱好者、专业摄影师还是行业用户,都能在这些无人机中找到适合自己的选择。
在网络条件和硬件资源允许的情况下,视频统一接入平台可支持无人机的国标GB/T 28181视频流统一接入,形成无人机视频的统一接入和统一服务能力平台,第三方应用或系统需要调用无人机视频一律通过视频统一接入平台,解决无人机视频的统一管理和服务。
(二)接入方式
1、拓扑图
多个无人机可以通过无人机系统接入到ASV10000视频监控平台;无人机系统可以运行在互联网,接收无人机的视频和定位信息。如下图为网络拓扑图:

2、接入方式
无人机系统平台支持国标28181协议,可以把无人机的实时视频和定位信息传递给视频监控平台。
GB28181支持平台级联,无人机系统平台作为下级GB28181的平台,级联到互联网的视频监控平台,实现了实时视频的转发、以及无人机实时位置的转发;这样,就可以非常方便的实现了所有无人机的视频接入和定位。
(三)无人机实时视频和定位
1、视频实时查看
通过视频监控平台客户端,可以看到多个无人机传回的实时视频画面,如下图所示:

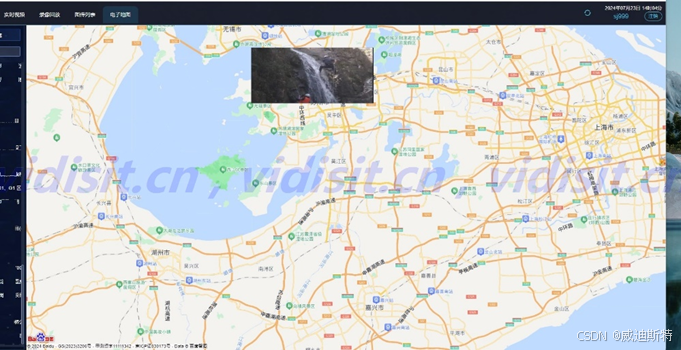
2、电子地图,查看实时视频
如下图,通过电子地图,可以点击某个摄像机,可以看到此无人机传回的实时视频画面,如下图所示:
四、功能和技术
(一)视频回传系统 (FPV - First Person View)
1、摄像头
高分辨率摄像头,通常具有光学变焦和稳定功能,确保在各种天气条件下都能拍摄清晰稳定的画面。
2、图传模块
采用数字信号传输,如5.8GHz或更先进的5G网络,以保证视频信号的高质量传输。一些高端无人机可能使用超宽带(UWB)技术或其他专有协议,提供更高的数据传输速率和更低的延迟。
3、编码器
视频数据经过压缩编码,减少传输所需带宽,同时保持图像质量。
4、接收器
地面站或遥控器上的接收器接收并解码视频信号,用户可通过显示屏实时观看无人机视野。
(二)定位与导航系统
1、GPS/北斗/GLONASS/Galileo
使用一种或多种全球卫星导航系统(GNSS),确保无人机在户外环境中的精准定位。
2、视觉定位系统
通过摄像头捕捉地面特征,与已知地图匹配,实现室内或无GPS信号环境下的定位。
3、惯性测量单元(IMU):
包含加速度计、陀螺仪和磁力计,用于感知无人机的姿态变化和角速度,辅助定位和稳定。
4、避障传感器
激光雷达(LiDAR)、红外、超声波等传感器用于探测障碍物,避免碰撞,确保飞行安全。
(三)控制与通信
1、遥控器
操作者使用遥控器发送控制指令给无人机,同时接收无人机状态和视频反馈。
2、双向数据链路
除了视频回传外,无人机与地面站之间还需要双向数据链路,用于发送控制指令和接收无人机的状态信息,如电池电量、飞行高度、速度等。
3、云服务
部分无人机可连接至云端,进行数据上传和远程监控,便于数据分析和管理。
文章正下方可以看到我的联系方式:鼠标“点击” 下面的 “威迪斯特-就是video system 微信名片”字样,就会出现我的二维码,欢迎沟通探讨。

















 677
677

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









