单像空间后方交会
数据文件
源代码
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
using System.IO;
using static System.Math;
namespace 摄影测量学4
{
public partial class MDIParent1 : Form
{
private int childFormNumber = 0;
public MDIParent1()
{
InitializeComponent();
}
private void ShowNewForm(object sender, EventArgs e)
{
Form childForm = new Form();
childForm.MdiParent = this;
childForm.Text = "窗口 " + childFormNumber++;
childForm.Show();
}
List<double> x=new List<double>();
List<double> y=new List<double>();
List<double> X = new List<double>();
List<double> Y=new List<double>();
List<double> Z = new List<double>();
double f = 0;
double m = 0;
double x0 = 0;
double y0 = 0;
double varphi = 0;
double omega = 0;
double kappa = 0;
double XS0 = 0;
double YS0 = 0;
double ZS0 = 0;
string line="";
private void OpenFile(object sender, EventArgs e)
{
string FileName="";
OpenFileDialog openFileDialog = new OpenFileDialog();
openFileDialog.InitialDirectory = Environment.GetFolderPath(Environment.SpecialFolder.Personal);
openFileDialog.Filter = "文本文件(*.txt)|*.txt|所有文件(*.*)|*.*";
if (openFileDialog.ShowDialog(this) == DialogResult.OK)
{
FileName = openFileDialog.FileName;
}
if (FileName != "")
{
try
{
using (StreamReader re = new StreamReader(FileName))
{
string linshidata = null;
int i = 0;
while ((linshidata = re.ReadLine()) != null)
{
line= linshidata;
if (i == 0)
{
f = double.Parse(line.Split(',')[0])/1000;
x0 = double.Parse(line.Split(',')[1]);
y0 = double.Parse(line.Split(',')[2]);
m = double.Parse(line.Split(',')[3]);
i += 1;
}
else
{
x.Add(double.Parse(line.Split(',')[0])/1000);
y.Add(double.Parse(line.Split(',')[1])/1000);
X.Add(double.Parse(line.Split(',')[2]));
Y.Add(double.Parse(line.Split(',')[3]));
Z.Add(double.Parse(line.Split(',')[4]));
}
}
//textBox1.Text = X[0].ToString();
XS0 = X.Sum() / X.Count();
YS0 = Y.Sum() / Y.Count();
ZS0 = m * f;
}
}
catch (Exception ex)
{
MessageBox.Show(ex.Message);
}
//chuzhi();
}
}
List<string> savedata=new List<string>();
private void SaveAsToolStripMenuItem_Click(object sender, EventArgs e)
{
string FileName = "";
SaveFileDialog saveFileDialog = new SaveFileDialog();
saveFileDialog.InitialDirectory = Environment.GetFolderPath(Environment.SpecialFolder.Personal);
saveFileDialog.Filter = "文本文件(*.txt)|*.txt|所有文件(*.*)|*.*";
if (saveFileDialog.ShowDialog(this) == DialogResult.OK)
{
FileName = saveFileDialog.FileName;
}
if(FileName!="")
{
try
{
using (StreamWriter sw= new StreamWriter(FileName))
{
for(int i=0;i<savedata.Count();i++)
{
sw.WriteLine(savedata[i]);
}
}
}
catch(Exception ex)
{
}
}
}
private void ExitToolsStripMenuItem_Click(object sender, EventArgs e)
{
this.Close();
}
//第四步旋转矩阵
public double[,] R()
{
double a1 = Cos(varphi) * Cos(kappa) - Sin(varphi) * Sin(omega) * Sin(kappa);
double a2 = -Cos(varphi) * Sin(kappa) - Sin(varphi) * Sin(omega) * Cos(kappa);
double a3 = -Sin(varphi) * Cos(omega);
double b1 = Cos(omega) * Sin(kappa);
double b2 = Cos(omega) * Cos(kappa);
double b3 = -Sin(omega);
double c1 = Cos(kappa) * Sin(varphi) + Cos(varphi) * Sin(omega) * Sin(kappa);
double c2 = -Sin(kappa) * Sin(varphi) + Cos(varphi) * Sin(omega) * Cos(kappa);
double c3 = Cos(varphi) * Cos(omega);
double[,] r = new double[3, 3]
{
{a1,a2,a3},
{b1,b2,b3},
{c1,c2,c3}
};
return r;
}
//第五步外方位元素坐标
public double[] xy(double xa,double ya,double za)
{
double[,] r = R();
double x = -f * (r[0, 0] * (xa - XS0) + r[1, 0] * (ya - YS0) + r[2, 0] * (za - ZS0)) /
(r[0, 2] * (xa - XS0) + r[1, 2] * (ya - YS0) + r[2, 2] * (za - ZS0));
double y = -f * (r[0, 1] * (xa - XS0) + r[1, 1] * (ya - YS0) + r[2, 1] * (za - ZS0)) /
(r[0, 2] * (xa - XS0) + r[1, 2] * (ya - YS0) + r[2, 2] * (za - ZS0));
double[] xx = new double[2] { x, y };
return xx;
}
//第七步
public double[,] A(double x,double y)
{
double a11 = -f / ZS0;
double a12 = 0;
double a13 = -x / ZS0;
double a14 = -f * (1 + x * x / (f * f));
double a15 = -x * y / f;
double a16 = y;
double a21 = 0;
double a22 = -f / ZS0;
double a23 = -y / ZS0;
double a24 = -x * y / f;
double a25 = -f * (1 + y * y / (f * f));
double a26 = -x;
double[,] AA = new double[2, 6]
{
{a11,a12,a13,a14,a15,a16 },
{a21,a22,a23,a24,a25,a26 }
};
return AA;
}
//第三步赋初值
public void chuzhi()
{
XS0 = X.Sum() / X.Count();
YS0=Y.Sum()/Y.Count();
ZS0 = m * f;
}
//矩阵乘法
public double[,] cheng(double[,] a, double[,] b)
{
int n = a.GetLength(1);
double[,] result = new double[a.GetLength(0), b.GetLength(1)];
for (int i = 0; i < a.GetLength(0); i++)
{
for (int j = 0; j < b.GetLength(1); j++)
{
double sum = 0;
for (int k = 0; k < n; k++)
{
sum += a[i, k] * b[k, j];
}
result[i, j] = sum;
}
}
return result;
}
//矩阵求逆
public static double[,] InvertMatrix(double[,] matrix)
{
int n = matrix.GetLength(0);
double[,] augmentedMatrix = AugmentMatrix(matrix);
for (int i = 0; i < n; i++)
{
// 对角线元素为1,其他元素为0的行变换
double divisor = augmentedMatrix[i, i];
for (int j = 0; j < 2 * n; j++)
{
augmentedMatrix[i, j] /= divisor;
}
// 将第i列的其他元素变为0
for (int k = 0; k < n; k++)
{
if (k != i)
{
double factor = augmentedMatrix[k, i];
for (int j = 0; j < 2 * n; j++)
{
augmentedMatrix[k, j] -= factor * augmentedMatrix[i, j];
}
}
}
}
// 取出逆矩阵部分(右侧部分)
double[,] inverseMatrix = new double[n, n];
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
inverseMatrix[i, j] = augmentedMatrix[i, j + n];
}
}
return inverseMatrix;
}
private static double[,] AugmentMatrix(double[,] matrix)
{
int n = matrix.GetLength(0);
double[,] augmentedMatrix = new double[n, 2 * n];
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
augmentedMatrix[i, j] = matrix[i, j];
augmentedMatrix[i, j + n] = (i == j) ? 1.0 : 0.0;
}
}
return augmentedMatrix;
}
//矩阵转置
public static double[,] Transpose(double[,] m)
{
double[,] lsm = new double[m.GetLength(1), m.GetLength(0)];
for (int i = 0; i < m.GetLength(0); i++)
{
for (int j = 0; j < m.GetLength(1); j++)
{
lsm[j, i] = m[i, j];
}
}
return lsm;
}
private void 计算ToolStripMenuItem_Click(object sender, EventArgs e)
{
double[,] RR = R();
double[,] yx = new double[x.Count * 2, 1];
double[,] startxy = new double[x.Count() * 2, 1];
double[,] AA = new double[x.Count() * 2, 6];
double xs0 = 0;
double ys0 = 0;
double zs0 = 0;
double varphi2 = 0;
double omega2 = 0;
double kappa2 = 0;
while (true)
{
for (int i = 0; i < x.Count(); i++)
{
yx[2 * i, 0] = xy(X[i], Y[i], Z[i])[0];
yx[2 * i + 1, 0] = xy(X[i], Y[i], Z[i])[1];
startxy[2 * i, 0] = x[i];
startxy[2 * i + 1, 0] = y[i];
}
double[,] L = SubtractMatrices(startxy, yx);
for (int i = 0; i < x.Count();)
{
double xxx = yx[i, 0];
double yyy = yx[i * 2, 0];
AA[i, 0] = A(xxx, yyy)[0, 0];
AA[i, 1] = A(xxx, yyy)[0, 1];
AA[i, 2] = A(xxx, yyy)[0, 2];
AA[i, 3] = A(xxx, yyy)[0, 3];
AA[i, 4] = A(xxx, yyy)[0, 4];
AA[i, 5] = A(xxx, yyy)[0, 5];
AA[i * 2, 0] = A(xxx, yyy)[1, 0];
AA[i * 2, 1] = A(xxx, yyy)[1, 1];
AA[i * 2, 2] = A(xxx, yyy)[1, 2];
AA[i * 2, 3] = A(xxx, yyy)[1, 3];
AA[i * 2, 4] = A(xxx, yyy)[1, 4];
AA[i * 2, 5] = A(xxx, yyy)[1, 5];
i += 2;
}
double[,] XX = cheng(Transpose(AA), AA);
XX = cheng(XX, Transpose(AA));
XX = cheng(XX, L);
xs0 = XS0;
ys0 = YS0;
zs0 = ZS0;
varphi2 = varphi;
omega2 = omega;
kappa2 = kappa;
XS0 = XS0 + XX[0, 0];
YS0 = YS0 + XX[1, 0];
ZS0 = ZS0 + XX[2, 0];
varphi = varphi + XX[3, 0];
omega = omega + XX[4, 0];
kappa = kappa + XX[5, 0];
x.Clear();
y.Clear();
for (int i = 0; i < yx.Length; i++)
{
if (i % 2 == 0)
{
x.Add(yx[i, 0]);
}
else
{
y.Add(yx[i, 0]);
}
}
if((XS0-xs0)<=1)
{
break;
}
else
{
xs0 = XS0;
ys0 = YS0;
zs0 = ZS0;
varphi2 = varphi;
omega2 = omega;
kappa2 = kappa;
}
}
//textBox1.Text = XS0.ToString();
textBox1.Clear();
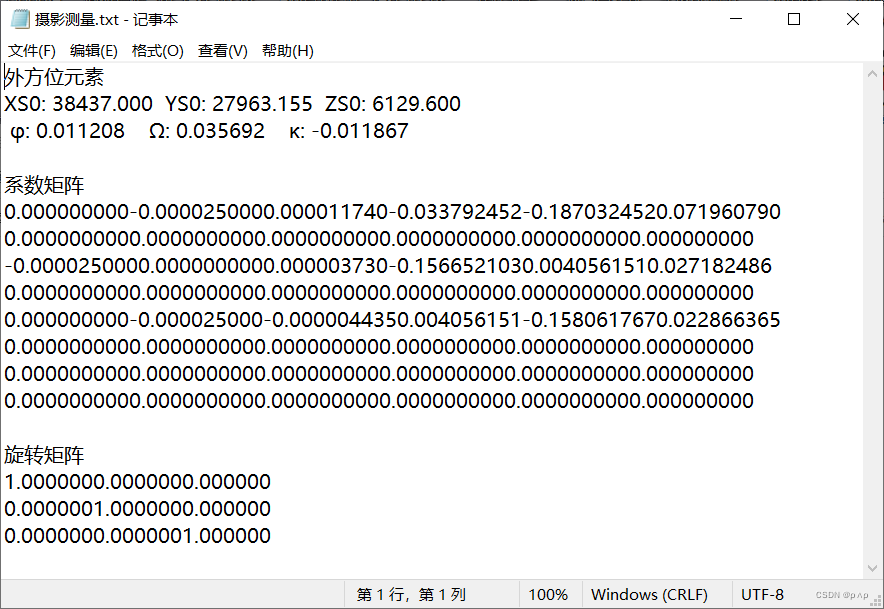
textBox1.AppendText("外方位元素\r\n");
textBox1.AppendText("XS0: " + XS0.ToString("0.000") + " YS0: "
+ YS0.ToString("0.000") + " ZS0: " + ZS0.ToString("0.000") +"\r\n"+
" φ: "+(varphi/Math.PI*180).ToString("0.000000")+" Ω: "+(omega / Math.PI * 180).ToString("0.000000")+
" κ: "+(kappa / Math.PI * 180).ToString("0.000000")+"\r\n");
savedata.Add("外方位元素");
savedata.Add("XS0: " + XS0.ToString("0.000") + " YS0: "
+ YS0.ToString("0.000") + " ZS0: " + ZS0.ToString("0.000"));
savedata.Add(" φ: " + (varphi / Math.PI * 180).ToString("0.000000") + " Ω: " + (omega / Math.PI * 180).ToString("0.000000") +
" κ: " + (kappa / Math.PI * 180).ToString("0.000000"));
textBox1.AppendText("\r\n"+"系数矩阵"+"\r\n");
savedata.Add("");
savedata.Add("系数矩阵");
for (int i=0;i<AA.GetLength(0);i++)
{
string line = "";
for(int j=0;j<AA.GetLength(1);j++)
{
textBox1.AppendText(AA[i, j].ToString("0.000000000") + " ");
line += AA[i, j].ToString("0.000000000");
}
savedata.Add(line);
line = "";
textBox1.AppendText("\r\n");
}
textBox1.AppendText("\r\n" + "旋转矩阵" + "\r\n");
savedata.Add("");
savedata.Add("旋转矩阵");
for (int i = 0; i < RR.GetLength(0); i++)
{
string line = "";
for (int j = 0; j < RR.GetLength(1); j++)
{
textBox1.AppendText((RR[i, j]).ToString("0.000000") + " ");
line += RR[i, j].ToString("0.000000");
}
savedata.Add(line);
line = "";
textBox1.AppendText("\r\n");
}
}
//矩阵相减
public static T[,] SubtractMatrices<T>(T[,] matrix1, T[,] matrix2)
{
int rows = matrix1.GetLength(0);
int columns = matrix1.GetLength(1);
if (rows != matrix2.GetLength(0) || columns != matrix2.GetLength(1))
{
throw new ArgumentException("矩阵的行列数必须相等");
}
T[,] result = new T[rows, columns];
for (int i = 0; i < rows; i++)
{
for (int j = 0; j < columns; j++)
{
dynamic value1 = matrix1[i, j];
dynamic value2 = matrix2[i, j];
result[i, j] = value1 - value2;
}
}
return result;
}
private void saveToolStripMenuItem_Click(object sender, EventArgs e)
{
string FileName = "";
SaveFileDialog saveFileDialog = new SaveFileDialog();
saveFileDialog.InitialDirectory = Environment.GetFolderPath(Environment.SpecialFolder.Personal);
saveFileDialog.Filter = "文本文件(*.txt)|*.txt|所有文件(*.*)|*.*";
if (saveFileDialog.ShowDialog(this) == DialogResult.OK)
{
FileName = saveFileDialog.FileName;
}
if (FileName != "")
{
try
{
using (StreamWriter sw = new StreamWriter(FileName))
{
for (int i = 0; i < savedata.Count(); i++)
{
sw.WriteLine(savedata[i]);
}
}
}
catch (Exception ex)
{
}
}
}
}
}
输出结果






















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









