







 本文详细介绍了STM32单片机GPIO的各种工作模式,包括输入的浮空、上拉、下拉和模拟模式,以及输出的推挽、开漏和复用模式。还涵盖了如何使用标准库函数配置GPIO,如GPIO_Init、GPIO_ReadInputDataBit等,以及GPIO_InitTypeDef结构体的构成和参数含义。
本文详细介绍了STM32单片机GPIO的各种工作模式,包括输入的浮空、上拉、下拉和模拟模式,以及输出的推挽、开漏和复用模式。还涵盖了如何使用标准库函数配置GPIO,如GPIO_Init、GPIO_ReadInputDataBit等,以及GPIO_InitTypeDef结构体的构成和参数含义。
学一个单片机我们首先得从如何点灯开始学,而学习点灯的过程就是对一个单片机的最基础的单元进行学习——GPIO(General-purpose input/outpu)
目录
一.GPIO模式。
基于stm32f103它的gpio有如下八种模式
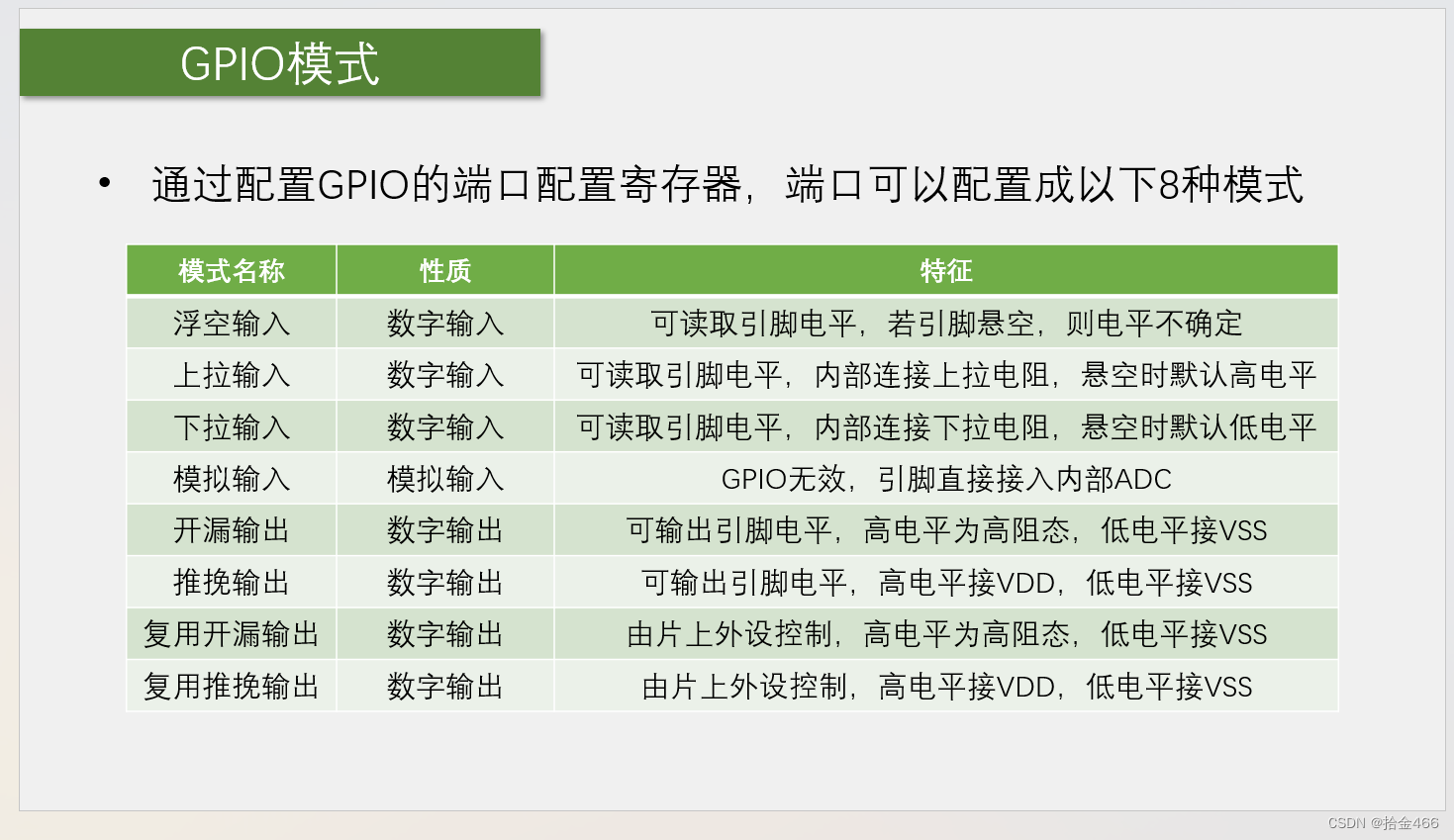
4种输入模式
浮空输入模式:数据通道中仅接入TTL触发器(作用是将相对缓慢变化的模拟信号变成矩形信号)整形,随后输入输入数据寄存器,该种工作模式未接入任何上拉/下拉电阻。 模式特点:在该引脚悬空(无信号输入)的情况下,读取该端口的电平是不确定的。 适用场合:外部按键输入/USART RX引脚。
上拉输入模式:与浮空输入模式相比,仅仅是在数据通道前端接入了一个上拉电阻,其余无变化。 模式特点:在无信号输入时端口电位受上拉电阻钳制,I/O端口输入电平始终保持为高电平;而当端口输入电平为低电平时,I/O端口输入电平为低电平。 适用场合:需要IO内部上拉电阻输入时,器件的外部中断(IRQ)引脚触发中断条件为下降沿触发/低电平触发,这样在无信号输入时始终保持高电平,如果有事件触发中断IRQ可以输出一个低电平,进而可产生(下降沿/低电平)中断。例如单片无线收发器芯片NRF24L01的IRQ引脚的工作模式即为上拉输入模式。
下拉输入模式:与浮空输入模式相比,仅仅是在数据通道前端接入了一个下拉电阻,其余无变化。 模式特点:在无信号输入时端口电位受下拉电阻钳制,I/O端口输入电平始终保持为低电平;而当端口输入电平为高电平时,I/O端口输入电平为高电平。 适用场合:需要IO内部下拉电阻输入时,器件的外部中断(IRQ)引脚触发中断条件为上升沿触发/高电平触发时,该端口可以选择下拉输入模式。
模拟输入模式:数据通道不接入任何处理单元(TTL触发器/钳制电阻),直接输入MCU内部的处理单元。 模式特点:相较于其他输入模式只能读取到逻辑高/低电平(数字量),该模式能读取到细微变化的值(模拟量)。 适用场合:ADC模拟输入/低功耗下省电。
4种输出模式
推挽输出:输出具有驱动能力,当CPU输出逻辑’0’时,I/O端口输出低电平,而当CPU输出逻辑’1’时,I/O端口输出高电平,通常作为普通的GPIO用于驱动LED、数码管等电子元器件或输出控制某个信号。
开漏输出
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4298
4298

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









