






rlc实验——rlc不同连接与各种图和传递函数,选择一两个
串联 & 并联
画图 传递函数 伯德图 零极点图 阶跃响应,极坐标图
低通 高通 带通 带阻
查传函,伯德图,零极点图,阶跃响应的含义
对照桌面上的新建文件夹的图片分析
得出实验结果及结论
惯性环节(一阶响应)的输出的稳态图基于电容C的充电图
自控模块在MATLAB(21版)的位置
打开软件 ----> 命令行窗口 ----> 对MATLAB不熟,快速入门 ----> 左上角第一个,文档主页 ----> 选择需要的模块 Control System Toolbox ----> 示例 ----> 找例子所在 Linear Analysis ----> 找到 Analyzing the Response of an RLC Circuit ----> 浏览文档信息 ----> 在文档中段找到open current GUI ----> 根据要求修改参数进行测试即可
此页面不仅有自控的模块,还有其他一些嵌入的模块
在常微分方程中,方程左端系数的值决定了方程的通解,而右端函数则决定了方程的特解
实验二 分析RLC系统的响应(Analyzing the Response of an RLC Circuit)
实验目的
- 通过实验研究RLC电路对输入信号的响应
- 利用传递函数分析系统的内部特性,利用伯德图,零极点图,分析其稳态和暂态响应特性,判断系统的稳定性和准确性
- 加深在自动控制应用下的,对电阻通高频,阻低频;通交流,阻直流特性的理解
实验原理
通过对MATLAB上的RLC响应地模块的参数的改变,观察在不同的拓扑结构(“串联”、“并联”)下和低通,高通,带通,带阻组合后的PLC电路的伯德特,零极点图,阶跃响应,奈奎斯特图并分析
- 低通:低频通过
- 高通:高频通过
- 带通:一定频率范围通过
- 带阻:阻止一定频率范围的信号
电容的特性
电容的特性:通高频,阻低频;通交流,阻直流 (参照容抗)
直流电流可以看做是频率为0的交流电,即为低频电流,在充电过程中,电流不断进入电容内部,随着电流的增加,电压越来越大,对电流的阻碍作用也越来越大,当电容充满时,对直流电流的阻碍作用趋于∞
输入电流为交流时,交流的频率越高,充电时间越短,对电流的阻碍作用就越小,所以电容通高频,阻低频;通交流,阻直流
从电容的充放电看其特性
如果电容充电时间一定,当一个高频交流的正半周结束的时候,假设电容的容量足够大,还未充满电,负半周就来了,则此时电路就会一直有电流在流通,对此高频交流来说,电容是导通的
对一个低频交流来说,由于充电时间是频率的倒数,频率很低的话,充电时间就会很久,正半周将电容器充满之后,负半周还没到来,电流就会在中途断流,对此低频交流电来说,该电容就相当于在中间短路了
对直流来说,电容没有充满的时候,电流流入电容,此时是导通的;当电容充满之后,直流电受到的阻碍趋于无穷大,电流流不进去,由于一直有电流“试图”进入电容,所以使得在电容里的电流流不出来,所以对直流电流来说,该电容是断路的
小电容通高频阻低频,大电容通低频阻高频
小电容的电容量小,充电和放电所需的时间就短,大电容的电容量较大,充放电的时间就长。从电流的变化角度来说,电流的正负半周交替较快的是高频电流,交替较慢的是低频信号
小电容通过低频电流的时候,由于容量较小,充满之后低频的负半周还没到来,所以会有断流的现象,等到负半周到来,电容放完电之后,由于正半周也姗姗来迟,所以此时电路中也不会有电流,此时也会形成断流
大电容从理论的角度来看,高低频应该都可以通过,因为高频在大电容处的表现为充放电的频率高,速度快,次数多,但由于大电容在制作工艺上要求极板的面积要大,甚至要通过使极板卷曲来增加电容量,此时极板的分布电感就会增大。对高频来说,分布电感越大,对它的阻碍作用就会越强,所以大电容在实际应用中就只能通低频
电容电阻的拓扑结构对输出电压的影响
对电子电路来说
电阻的两端并联一个电容 —— 为了减小对高频信号的阻抗,相当于微分,这样信号上升速度加快,用于提高响应速度
电容一端接电阻(一端接地)—— 滤去高频,相当于积分,用于滤波
对于电力电路: 不管RC串联还是并联,电容的作用都是一样的,电容的作用就是防止电压突变,吸收尖峰状态的过电压,串联的电阻起阻尼作用,电阻消耗过电压的能量,从而抑制电路的振荡
并联的电阻吸收电容的电能,防止电容的放电电流过大,避免对与之并联的器件(如晶闸管)造成损坏。 最典型的应用就是防止操作过电压。
系统的传函,伯德图,零极点图,阶跃响应反映的系统特性
1.传递函数
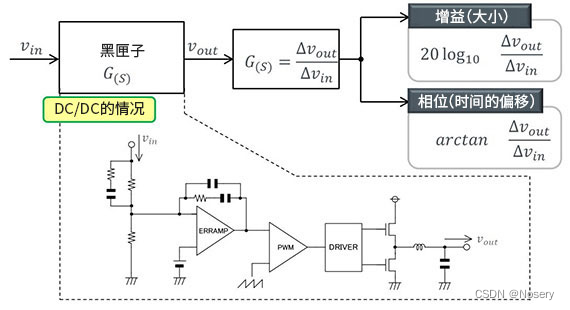
用于表示在零状态下(系统没有原始储能,此时输入和输出及其各阶导数也为零,输出只和输入的信号有关),即传函表征的是零状态响应,信号输入和输出关系的函数,传函是零初始条件下系统输出量的Laplace变换与系统输入量的Laplace变换之比
即信号通过一个系统后,原本的输入信号经过传递函数变为输出信号。相当于是用来拟合或描述“黑箱”系统输入输出关系的表达式
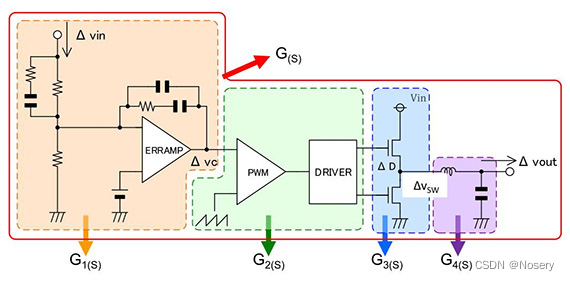
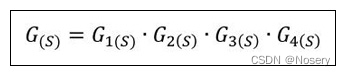
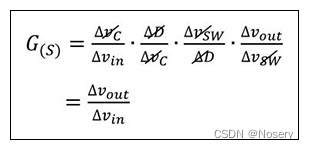
传递函数可以分解为各部分的积——可以通过求系统各部分的传递函数的积来确定系统的传函

传函只能描述单输入单输出的LTI系统
传函的增益表示传递路径的增幅率,相位表示传递时间的偏差
最简单朴素的判断一个系统是否收敛的办法就是——通过判断该系统的单位冲击响应是否收敛来判断
因为任意有边界的输入激励经过系统产生的响应都可以分解成若干个时刻的单位冲击响应的线性组合,所以只要系统在单位冲击激励下的响应是收敛的,那么对任意有边界的信号的输出响应也是收敛的
线性时不变系统稳定的充分必要条件是:闭环传递函数极点的实部小于零(即极点在复平面的左半平面)
2.伯德图
伯德图由对数幅频特性和对数相频特性两条曲线构成。伯德图是线性时不变系统的传递函数对频率的半对数坐标图,其横轴频率以对数尺度(log scale)表示,纵坐标幅值或相角采用线性分度,利用伯德图可以看出系统的频率响应
3.零极点图
开环系统的稳定性只与系统的极点有关,极点都在左边平面,则该系统是稳定系统,否则为不稳定系统;闭环系统的极点的分布会受零点的影响
4.阶跃响应
传递函数的单位阶跃响应是指系统在单位阶跃信号的作用下所产生的零状态响应(单位阶跃函数在t=0这个点不连续)


当 t 趋近于零时,e的-at次方趋近于零,x(t)趋近于1,此时出现了另一个新概念——时间常数(time constant)

如图所示,一个时间周期内就会达到稳定状态的63%,4个周期就会达到98%,自动控制里,%2的误差已经算是精度比较高的了,所以,一般认为4个时间周期,系统就会达到稳态
- 单位阶跃函数的响应为线性系统的阶跃响应
- 阶跃响应的导数为系统的脉冲响应函数
- 脉冲响应函数的拉氏变换为系统的传递函数
- 传递函数的反拉氏变换为脉冲响应函数
- 脉冲响应函数的积分为阶跃响应函数
5.奎奈斯特图
奈奎斯特图,是一种线性控制系统的频率特性图,对于一个连续时间的线性非时变系统,将其频率响应的增益及相位以极坐标的方式绘出。常在控制系统或信号处理中使用,可以用来判断一个有反馈的系统是否稳定,也可称为幅相图
奈奎斯特图上每一点都是对应一特定频率下的频率响应,该点相对于原点的角度表示相位,而和原点之间的距离表示增益,因此奈奎斯特图将振幅及相位的Bode 图综合在一张图中。一般的系统有低通滤波的特性,高频时的频率响应会衰减,增益降低,因此高频部分在奈奎斯特图中会出现在较靠近原点的区域
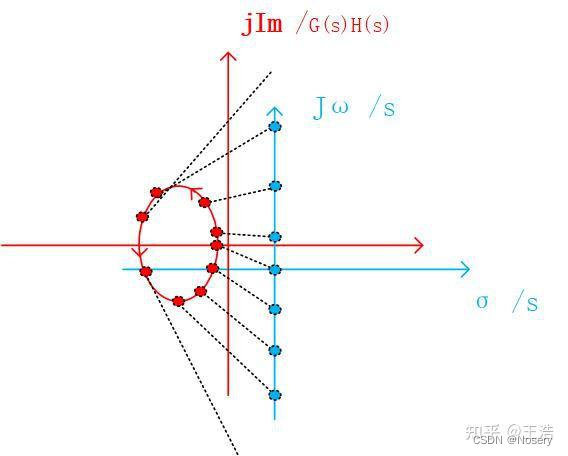
奈奎斯特曲线:开环传递函数G(s)H(s)在复平面随自变量s=jω从ω=-∞到ω=+∞的运动轨迹曲线
奈奎斯特稳定判据
若系统的开环传递函数G(s)H(s)在右半平面上有P个极点(开环传函的奎奈斯特曲线围绕(0,0)的圈数为N),且奈奎斯特曲线包围 (-1,j0) 点的圈数为N,则闭环传递函数在右半平面的极点个数为N+P。当N+P=0时,代表闭环传递函数在右半平面没有极点,则系统是稳定的;若不等于0,,则系统不稳定
开环传函的稳定性——
闭环传函的稳定性——开环传函在右半平面上没有极点,且幅相图没有包含 (-1,j0) 点的圆圈
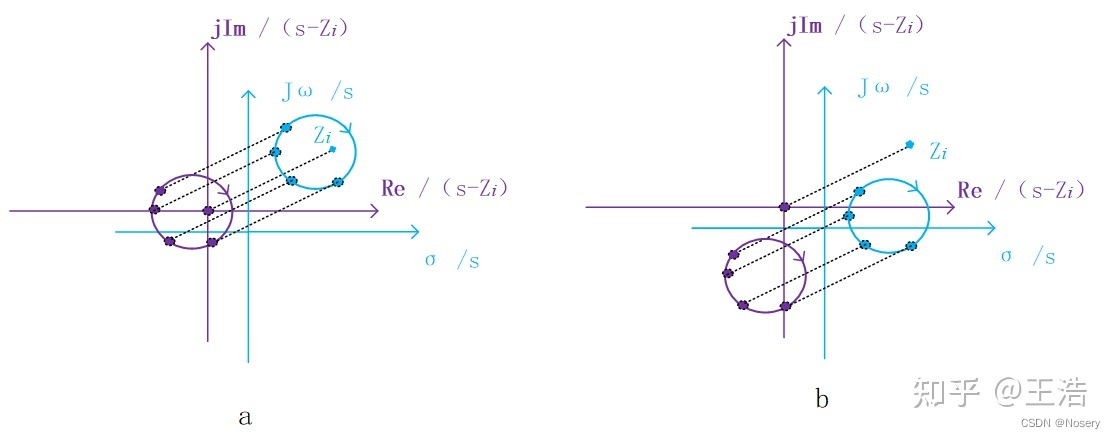
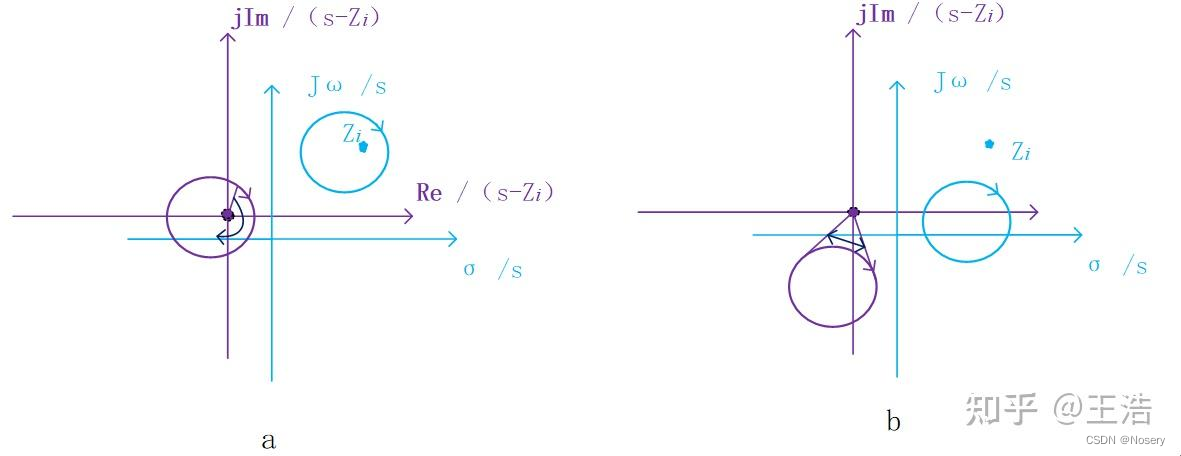
复平面映射到G(s)H(s)平面上的时候,如果复平面上传函的分解的因式分布在原点的周围(也就是说,可以画出一条顺时针的闭合曲线将传函的各个因式连接到一起)开环函数的幅相图就映射在G(s)H(s)面的实轴的上方;如果传函分解的因式在复平面上没有绕原点分布,则映射到G(s)H(s)平面上,幅相图就在实轴上
传函零点的物理意义
零点是使传函的分子趋于零的点,此时,传函整体趋于0,可以认为该系统是稳定的;如果零点趋于无穷大,则传函的分子趋于无穷大,传函趋于无穷大,结果就是震荡的
零点,表征着输入信号对系统的暂态影响,因为零点就是输入函数进行Laplace变换之后的分子多项式的根
每一个极点之处,增益衰减-3db,并移相-45度。极点之后每十倍频,增益下降20db.零点与极点相反;每一个零点之处,增益增加3db,并移相45度。零点之后,每十倍频,增益增加20db。
传函极点的物理意义
极点是使传函的分母趋于无穷大的点,此时,传函整体趋于无穷小,基本为0,就可以认为这个系统是稳定的;如果极点趋于0,则传函的分母趋于零,传函就会趋于无穷大,此时,传函至少也是震荡的
如果系统具有复数极点,一般都是共轭的
极点的实部小于0,则脉冲响应的结果是震荡收敛;如果极点的实部大于0,则脉冲响应的结果是震荡发散。如果极点为0,则脉冲响应结果是在不断震荡(等幅震荡)
极点在没有反馈输入的情况下,是系统本身的性质,无论怎么调整输入,改变物理系统的输入,甚至是调整输入函数,都不会改变极点的值
从信号层面分析,极点就是输入信号的时延,在输入信号改变的时候,输出信号总会延迟一段时间才会出现,它改变的速度和电容及电阻的大小呈正相关,由于RC的量纲为秒,故称它为时间常数,一般来说,在3个时间常数时,系统就会达到稳态
实验过程
在MATLAB里面打开相应的模块,调整参数,观察其变化情况

1.低通串联
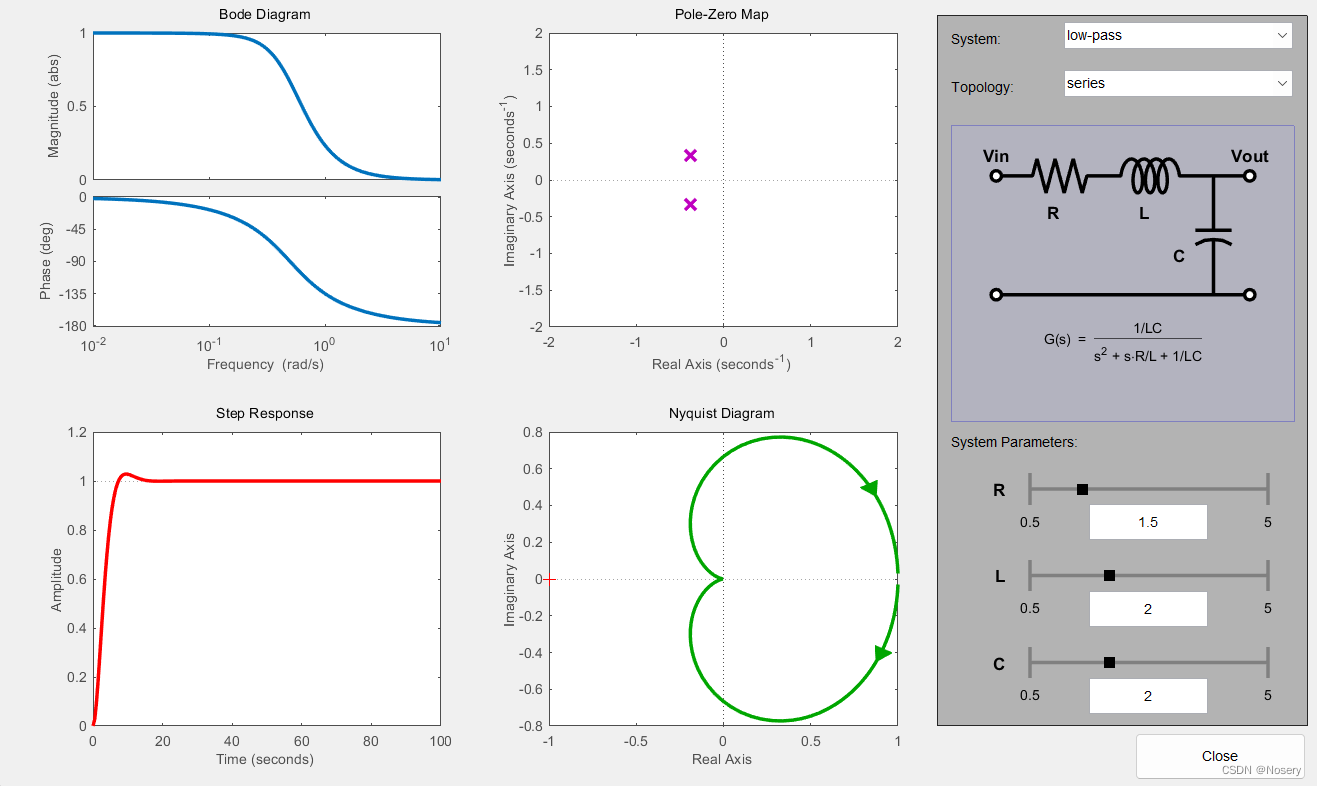
由上图可知,在低通串联,参数正常的情况下
- 伯德图 幅值和相位都随着时间慢慢下降
- 零极点图 极点都位于左边平面——系统是稳定的,且该系统参数下,极点为共轭的
- 阶跃响应 阶跃响应在15s左右振幅达到稳定
- 奈奎斯特图 右半平面开环极点P的个数为0,开环传函
低通串联大电容
实验总结



















 3436
3436

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











