






今天我们来学习新的内容 —— PID算法。想必大家都听说过 PID 算法的鼎鼎大名了,今天我们就从增量式 PID 和位置式 PID 这两种来认识这个非常实用且通用的控制算法。
简介
首先,我们还是先来简单了解一下什么是 PID 。
PID即:Proportional(比例)、Integral(积分)、Differential(微分)的缩写。PID 的使用场景非常广泛,凡是需要将某个物理量保持稳定的场景,PID 都可以大显神通。像它的名字一样,它的组成部分有三个部分:比例部分、积分部分、微分部分。

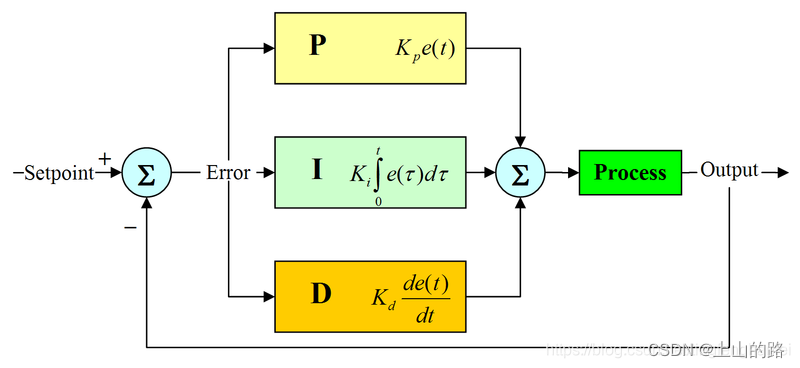
1.比例(P)部分
成比例地反映控制系统的偏差信号 e(t),偏差一旦产生,控制器立即产生控制作用,以减小偏差。当仅有比例控制时系统输出存在稳态误差。P 参数越大比例作用越强,动态响应越快,消除误差的能力越强。但实际系统是有惯性的,控制输出变化后,实际 u(t) 值变化还需等待一段时间才会缓慢变化。所以,由于实际系统是有惯性的,比例作用不宜太强,比例作用太强会引起系统振荡不稳定。P 参数的大小应在以上定量计算的基础上根据系统响应情况,现场调试决定,通常将P参数由大向小调,以能达到最快响应又无超调为最佳参数。
要形象地理解的话,就比如控制水温,要控制现在的水温达到目标的水温,加热的功率根据两者的差距按比例来提供。当当前水温与目标水温差距较小时,就可以以较小的功率加热;当当前水温与目标水温差距较大时,就可以以较大的功率加热;当当前水温与目标水温差距极大时,就可以以极大的功率加热,就可以快速达到接近目标水温的温度。
2.积分(I)部分
控制器的输出与输入误差信号的积分成正比关系,主要用于消除静差。积分作用的强弱取决于积分时间常数 t,t 越大,积分作用越弱,反之则越强。
由于只有比例部分是不可能完全消除静态误差的,加强比例作用只能减小静态误差,所以必须引入积分作用。积分作用消除静差的原理是,只要有误差存在,就对误差进行积分,使输出继续增大或减小,一直到误差为零,积分停止,输出不再变化。但由于实际系统是有惯性的,输出变化后,u(t) 值不会马上变化,须等待一段时间才缓慢变化,因此积分的快慢必须与实际系统的惯性相匹配,惯性大,积分作用就应该弱,积分时间 I 就应该大些,反之而然。如果积分作用太强,积分输出变化过快,就会引起积分过头的现象,产生积分超调和振荡。通常 I 参数也是由大往小调,即积分作用由小往大调,观察系统响应以能达到快速消除误差,达到给定值,又不引起振荡为准。
还是拿控制水温来理解,按前面的按比例提供功率加热,当水温到达某个接近目标水温的温度时,我们按比例提供的加热功率来加入水与水的自然降温速度一样了,诶,温度没法再加了。这时候就需要到积分部分了,在前面一开始加热时就开始累积误差,时刻矫正着加热的力度,从而使水温更加接近目标水温。
3.微分部分
反映偏差信号的变化趋势,并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。
不论比例调节作用,还是积分调节作用都是建立在产生误差后才进行调节以消除误差,都是事后调节。但是我们肯定是想要我们的系统在控制调整后能快速恢复,比例作用和积分作用是事后调节(即发生误差后才进行调节),而微分作用则是事前预防控制,即一发现u(t)有变大或变小的趋势,马上就输出一个阻止其变化的控制信号,以防止出现过冲或超调等。D越大,微分作用越强,D越小,微分作用越弱。系统调试时通常把D从小往大调,具体参数由试验决定。
接着用控制水温来理解,就是当我们要对水加热或冷却时,都要一定程度去减小这个水的加热或冷却的速度,从而避免加热或冷却太过了。也许举另一个例子会更加形象,“阻尼” 大家都知道吧,其实微分部分的作用就相当于是 “阻尼” 的作用。
位置式PID
位置式 PID 的公式如下:

下面我们使用代码来实现这条公式。
我们可以先定义一个结构体来保存我们需要使用到的变量。
typedef struct
{
float target_val; //目标值
float err; //误差值
float err_last; //上一个误差值
float Kp,Ki,Kd; //比例、积分、微分系数
float integral; //积分值
float output_val; //输出值
}PID;然后我们根据公式来写我们的位置式 PID 的运算函数。
float PID_realize(PID* pid, float actual_val)
{
pid->err = pid->target_val - actual_val; (1)
pid->integral += pid->err; (2)
pid->output_val = pid->Kp * pid->err +
pid->Ki * pid->integral +
pid->Kd * (pid->err - pid->err_last); (3)
pid->err_last = pid->err; (4)
return pid->output_val;
}(1)首先是计算出误差e(k),就是用目标值pid.target_val当前值actual_val。
(2)然后就是计算积分部分的误差累加,把每次的误差pid.err累加进pid.integral,就实现了e(k)的积累。
(3)接着就是把三个部分加起来,把计算结果放在pid.output_val里面,最后返回该值即是公式的输出了。
(4)再把这次计算得到的误差e(k)更新为上一次计算得到的误差e(k-1)。
增量式PID
增量式 PID 的公式如下:

同样,我们可以先定义一个结构体来保存我们需要使用到的变量。,只是与位置式 PID 不同的是这里我们要多一个变量来保存上上次计算得到的误差。
typedef struct
{
float target_val; //目标值
float err; //误差值
float err_last; //上一个误差值
float err_last_last;//上上个误差值
float Kp,Ki,Kd; //比例、积分、微分系数
float integral; //积分值
float output_val; //输出值
}PID;下面我们根据公式来写我们的增量式 PID 的运算函数。
float PID_realize(PID* pid, float actual_val)
{
pid->err = pid->target_val - actual_val; (1)
pid->output_val = pid->Kp * (pid->err - pid->err_last) +
pid->Ki * pid->err +
pid->Kd * (pid->err - 2 * pid->err_last + pid->err_last_last); (2)
pid->err_last_last = pid->err_last; (3)
pid->err_last = pid->err;
return pid->output_val;
}(1)首先是计算出误差e(k),就是用目标值pid.target_val当前值actual_val。
(2)然后是将三个部分加起来算出Δu(k),把计算结果放在pid.output_val里面,最后返回该值即是公式的输出了。
(3)再把这次计算得到的误差e(k)更新为上一次计算得到的误差e(k-1),把上次计算得到的误差e(k-1)更新为上上次计算得到的误差e(k-2)。
注意:这里的函数返回值只是Δu(k),在函数外还要计算u(k)。
以上就是今天关于 PID 的理论内容了, 至于实际操作是需要多去尝试才能掌握到调 PID 参数的技巧以及要掌握的 “度” 。下面是个人找到觉得讲的非常好的B站博主的调参视频连接。
下期见!!!

















 1479
1479

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









