






Paper's Information
Author
Sylvain Paris, Pierre Kornprobst, Jack Tumblin and Fr´ edo Durand
Periodical
Titile
Bilateral Filtering: Theory and Applications
Background and Abstract
Background
Bilateral filtering is a technique to smooth images while preserving edges. It can be traced back to 1995 with the work of Aurich and Weule on nonlinear Gaussian filters. It was later rediscovered by Smith and Brady as part of their SUSAN framework, and Tomasi and Manduchi who gave it its current name. Since then, the use of bilateral filtering has grown rapidly and is now ubiquitous in image processing applications Figure 1.1. It has been used in various contexts such as denoising , texture editing and relighting, tone management, demosaicking, stylization, and optical-flow estimation.
Abstract
The bilateral filter is a non-linear technique that can blur an image while respecting strong edges. Its ability to decompose an image into different scales without causing haloes after modification has made it ubiquitous in computational photography applications such as tone mapping, style transfer, relighting, and denoising. This text provides a graphical, intuitive introduction to bilateral filtering, a practical guide for efficient implementation and an overview of its numerous applications, as well as mathematical analysis. The bilateral filter has several qualities that explain its success:
• Its formulation is simple: each pixel is replaced by a weighted average of its neighbors. This aspect is important because it makes it easy to acquire intuition about its behavior, to adapt it to application-specific requirements, and to implement it.
• It depends only on two parameters that indicate the size and contrast of the features to preserve.
• It can be used in a non-iterative manner. This makes the parameters easy to set since their e ect is not cumulative over several iterations.
• It can be computed at interactive speed even on large images, thanks to efficient numerical schemes, and even in real time if graphics hardware is available.
The Theory Of Bilateral Filtering
Image Smoothing with Gaussian Convolution
each output image pixel value is a weighted sum of its neighbors in the input image. The core component is the convolution by a kernel which is the basic operation in linear shift-invariant image filtering. At each output pixel position it estimates the local average of intensities, and corresponds to low-pass filtering. An image filtered by Gaussian Convolution is given by:
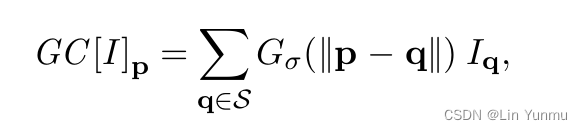
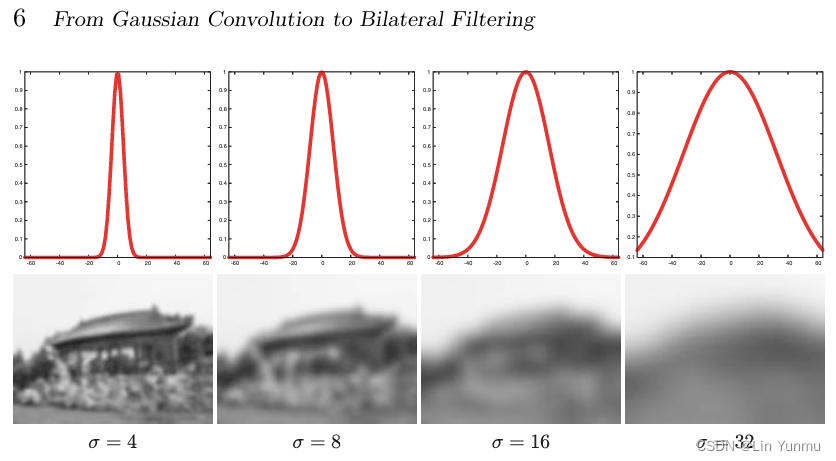
where Gσ(x) denotes the 2D Gaussian kernel (see Figure 2.1):
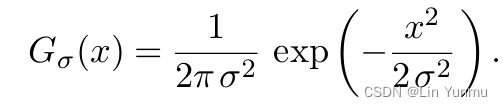
Gaussian filtering is a weighted average of the intensity of the adjacent positions with a weight decreasing with the spatial distance to the center position p. The weight for pixel q is defined by the Gaussian Gσ(||p − q||), where σ is a parameter defining the neighborhood size. The strength of this influence depends only on the spatial distance between the pixels and not their values. For instance, a bright pixel has a strong influence over an adjacent dark pixel although these two pixel values are quite different. As a result, image edges are blurred because pixels across discontinuities are averaged together (see Figure 2.1).
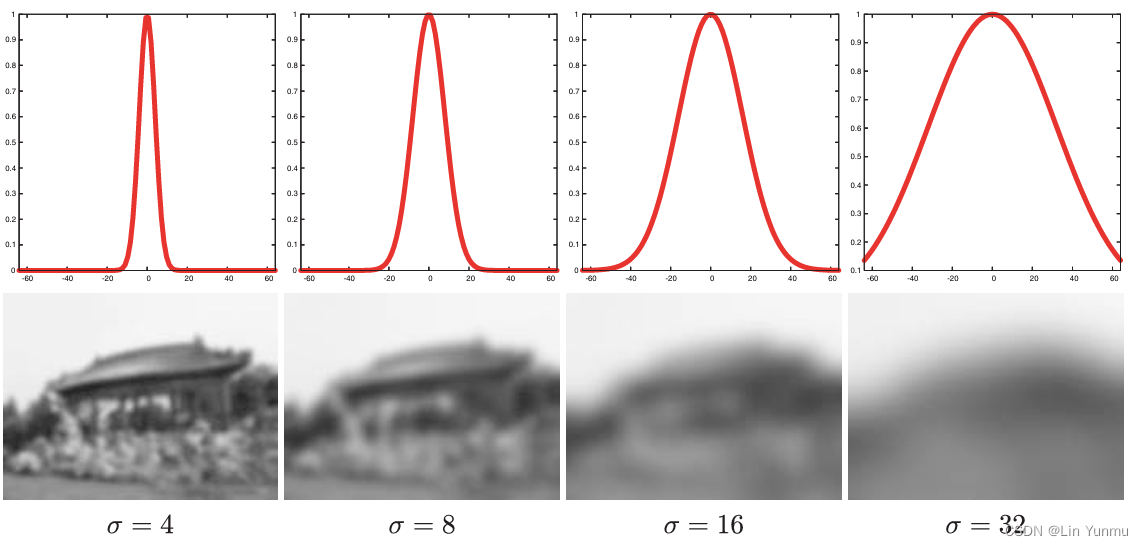
Fig.2.1Example of Gaussian linear filtering with different σ. Top row shows the profile of a 1D Gaussian kernel and bottom row the result obtained by the corresponding 2D Gaussian convolution filtering. Edges are lost with high values of σ because averaging is performed over a much larger area.
Edge-preserving Filtering with the Bilateral Filter
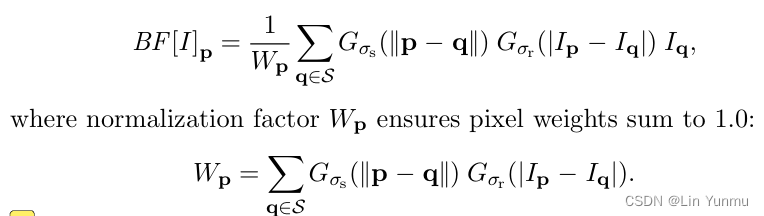
The bilateral filter is also defined as a weighted average of nearby pixels, in a manner very similar to Gaussian convolution.The difference is that the bilateral filter takes into account the difference in value with the neighbors to preserve edges while smoothing. The key idea of the bilateralfilter is that for a pixel to influence another pixel, it should not only occupy a nearby location but also have a similar value. The bilateral filter, denoted by BF[·], is defined by:

where normalization factor Wp ensures pixel weights sum to 1.0:

Parameters σs and σr will specify the amount of filtering for the imageI. Equation(3) is a normalized weighted average where Gσs is a spatial.
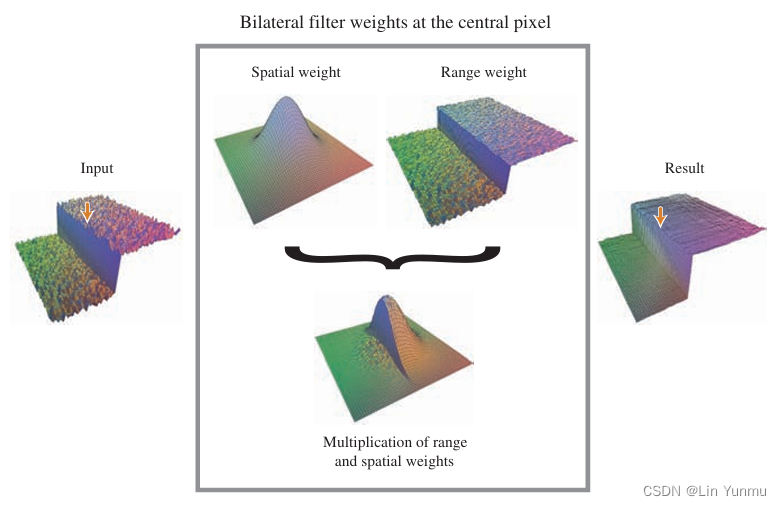
Each pixel is replaced by a weighted average of its neighbors. Each neighbor is weighted by a spatial component that penalizes distant pixels and range component that penalizes pixels with a different intensity. The combination of both components ensures that only nearby similar pixels contribute to the final result.
Compare with Gaussian Convolution
Gaussian weighting that decreases the influence of distant pixels, Gσr is a range Gaussian that decreases the influence of pixels q when their intensity values differ from Ip.
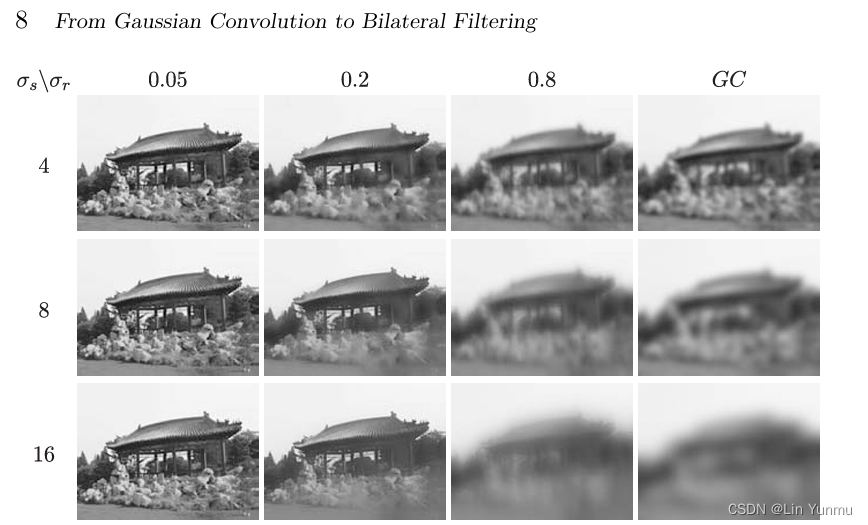
The bilateral filter is controlled by two parameters: σs and σr. Figure 2.3 illustrates their effect.
• As the range parameter σr increases, the bilateral filter gradu ally approximates Gaussian convolution more closely because the range Gaussian Gσr widens and flattens, i.e., is nearly constant over the intensity interval of the image.
• Increasing the spatial parameter σs smooths larger features.
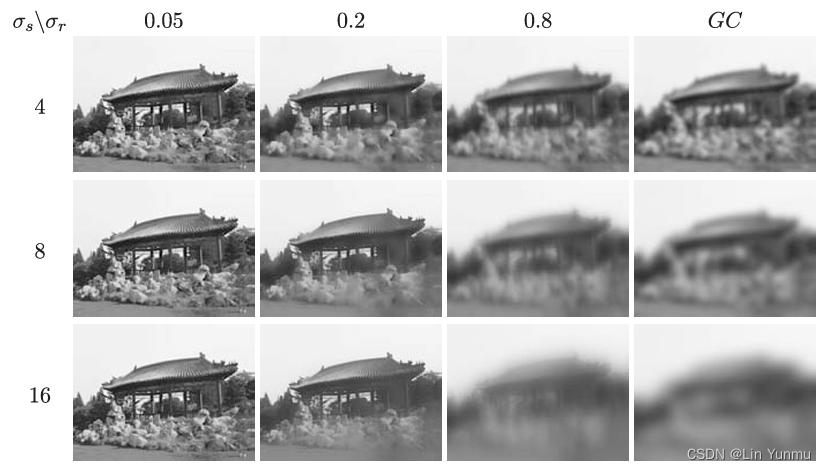
The bilateral filter’s range and spatial parameters provide more versatile control than Gaussian convolution. As soon as either of the bilateral filter weights reaches values near zero, no smoothing occurs. As a consequence, increasing the spatial sigma will not blur an edge as long as the range sigma is smaller than the edge amplitude. For example, note the rooftop contours are sharp for small and moderate range settings σr, and that sharpness is independent of the spatial setting σs. The original image intensity values span [0,1].
The Advantages Of Paper
To conclude, bilateral filtering is an effective way to smooth an image while preserving its discontinuities and also to separate image structures of different scales.
Individual Opinions
1.开篇介绍了高斯卷积的平滑仅是取决于某一像素元素值(intensity)与其相邻像素元素值的加权和,对于每一个输出像素强度是该加权和的平均数。
高斯滤波是相邻位置强度的加权平均值,其权重随着到中心位置p的空间距离而减小。像素q的权重由高斯Gσ(||p−q||)定义,其中σ是定义邻域大小的参数。这种影响的强度仅取决于像素之间的空间距离,而不取决于它们的值。例如,亮像素对相邻的暗像素有很强的影响,尽管这两个像素值非常不同。因此,图像边缘变得模糊,因为不连续处的像素被平均在一起。
2.Bilateral Filtering的关键思想是,对于影响另一个像素的像素,它不仅应该占据附近的位置,而且应该具有相似的值。
它由以下两个参数控制
:高斯加权减少了远处像素的影响,Gσr是一个范围高斯,当像素的强度值与Ip不同时,它减少了像素q的影响。
随着范围参数σr的增加,双边滤波器逐渐更接近高斯卷积,因为范围高斯Gσr变宽和变平,即在图像的强度区间内几乎不变。
(用于控制基于中心像素p领域中可接受的相似强度数值范围,在p强度值附近浮动)
:
增加空间参数σs可以平滑较大的特征。(定义周围领域的大小的参数)
双边滤波器的范围和空间参数提供了比高斯卷积更通用的控制。一旦双边滤波器权重中的任何一个达到接近零的值,就不会发生平滑。因此,只要小于边缘幅度,增加
就不会模糊边缘。原始图像强度值范围为[0,1]。
3.学习到了欧几里得距离、归一化和范数的定义
欧氏距离(Euclidean Distance) - 知乎 (zhihu.com)















 1126
1126











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









