







一.姿态解算
飞机飞行时的状态可以使用三个欧拉角表示,俯仰角、横滚角、偏航角,解算欧拉角后可以使用PID进行控制。
常用姿态解算方式:
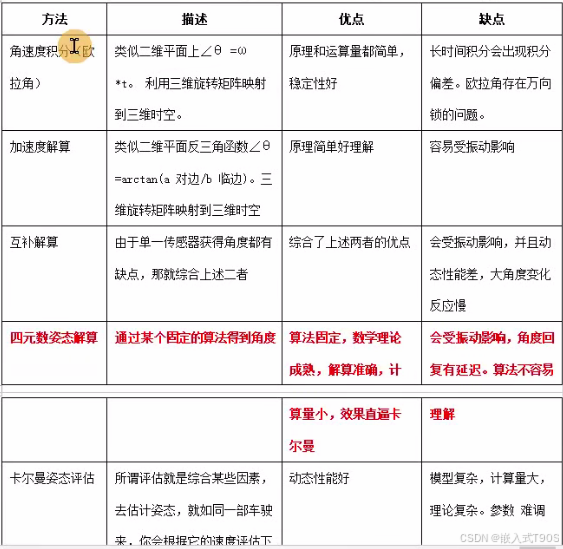
使用姿态结算方式为四元数姿态解算:
本次采用读取MPU6050的加速度和角速度做四元数结算姿态,最终得到欧拉角。最终得到三个欧拉角和三个角速度,六个PID。
二.欧拉角解算
直接将代码移植进文件:
#include "Com_IMU.h"
#include "math.h"
/* ============================欧拉角计算================================== */
/* ===============================开始===================================== */
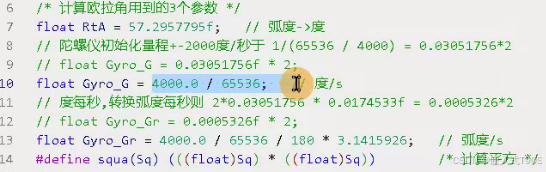
/* 计算欧拉角用到的3个参数 */
float RtA = 57.2957795f; // 弧度->度
// 陀螺仪初始化量程+-2000度/秒于 1/(65536 / 4000) = 0.03051756*2
// float Gyro_G = 0.03051756f * 2;
float Gyro_G = 4000.0 / 65536; // 度/s
// 度每秒,转换弧度每秒则 2*0.03051756 * 0.0174533f = 0.0005326*2
// float Gyro_Gr = 0.0005326f * 2;
float Gyro_Gr = 4000.0 / 65536 / 180 * 3.1415926; // 弧度/s
#define squa(Sq) (((float)Sq) * ((float)Sq)) /* 计算平方 */
/**
* @description: 快速计算 1/sqrt(num)
* @param {float} number
*/
static float Q_rsqrt(float number)
{
long i;
float x2, y;
const float threehalfs = 1.5F;
x2 = number * 0.5F;
y = number;
i = *(long *)&y;
i = 0x5f3759df - (i >> 1);
y = *(float *)&i;
y = y * (threehalfs - (x2 * y * y)); // 1st iteration (第一次牛顿迭代)
return y;
}
static double normAccz; /* z轴上的加速度 */
/**
* @description: 根据mpu的6轴数据, 获取表征姿态的欧拉角
* @param {GyroAccel_Struct} *gyroAccel mpu的6轴数据
* @param {EulerAngle_Struct} *EulerAngle 计算后得到的欧拉角
* @param {float} dt 采样周期 (单位s)
* @return {*}
*/
void Common_IMU_GetEulerAngle(GyroAccel_Struct *gyroAccel,
EulerAngle_Struct *eulerAngle,
float dt)
{
volatile struct V
{
float x;
float y;
float z;
} Gravity, Acc, Gyro, AccGravity;
static struct V GyroIntegError = {0};
static float KpDef = 0.8f;
static float KiDef = 0.0003f;
static Quaternion_Struct NumQ = {1, 0, 0, 0};
float q0_t, q1_t, q2_t, q3_t;
// float NormAcc;
float NormQuat;
float HalfTime = dt * 0.5f;
// 提取等效旋转矩阵中的重力分量
Gravity.x = 2 * (NumQ.q1 * NumQ.q3 - NumQ.q0 * NumQ.q2);
Gravity.y = 2 * (NumQ.q0 * NumQ.q1 + NumQ.q2 * NumQ.q3);
Gravity.z = 1 - 2 * (NumQ.q1 * NumQ.q1 + NumQ.q2 * NumQ.q2);
// 加速度归一化
NormQuat = Q_rsqrt(squa(gyroAccel->accel.accelX) +
squa(gyroAccel->accel.accelY) +
squa(gyroAccel->accel.accelZ));
Acc.x = gyroAccel->accel.accelX * NormQuat;
Acc.y = gyroAccel->accel.accelY * NormQuat;
Acc.z = gyroAccel->accel.accelZ * NormQuat;
// 向量差乘得出的值
AccGravity.x = (Acc.y * Gravity.z - Acc.z * Gravity.y);
AccGravity.y = (Acc.z * Gravity.x - Acc.x * Gravity.z);
AccGravity.z = (Acc.x * Gravity.y - Acc.y * Gravity.x);
// 再做加速度积分补偿角速度的补偿值
GyroIntegError.x += AccGravity.x * KiDef;
GyroIntegError.y += AccGravity.y * KiDef;
GyroIntegError.z += AccGravity.z * KiDef;
// 角速度融合加速度积分补偿值
Gyro.x = gyroAccel->gyro.gyroX * Gyro_Gr + KpDef * AccGravity.x + GyroIntegError.x; // 弧度制
Gyro.y = gyroAccel->gyro.gyroY * Gyro_Gr + KpDef * AccGravity.y + GyroIntegError.y;
Gyro.z = gyroAccel->gyro.gyroZ * Gyro_Gr + KpDef * AccGravity.z + GyroIntegError.z;
// 一阶龙格库塔法, 更新四元数
q0_t = (-NumQ.q1 * Gyro.x - NumQ.q2 * Gyro.y - NumQ.q3 * Gyro.z) * HalfTime;
q1_t = (NumQ.q0 * Gyro.x - NumQ.q3 * Gyro.y + NumQ.q2 * Gyro.z) * HalfTime;
q2_t = (NumQ.q3 * Gyro.x + NumQ.q0 * Gyro.y - NumQ.q1 * Gyro.z) * HalfTime;
q3_t = (-NumQ.q2 * Gyro.x + NumQ.q1 * Gyro.y + NumQ.q0 * Gyro.z) * HalfTime;
NumQ.q0 += q0_t;
NumQ.q1 += q1_t;
NumQ.q2 += q2_t;
NumQ.q3 += q3_t;
// 四元数归一化
NormQuat = Q_rsqrt(squa(NumQ.q0) + squa(NumQ.q1) + squa(NumQ.q2) + squa(NumQ.q3));
NumQ.q0 *= NormQuat;
NumQ.q1 *= NormQuat;
NumQ.q2 *= NormQuat;
NumQ.q3 *= NormQuat;
/*机体坐标系下的Z方向向量*/
float vecxZ = 2 * NumQ.q0 * NumQ.q2 - 2 * NumQ.q1 * NumQ.q3; /*矩阵(3,1)项*/
float vecyZ = 2 * NumQ.q2 * NumQ.q3 + 2 * NumQ.q0 * NumQ.q1; /*矩阵(3,2)项*/
float veczZ = 1 - 2 * NumQ.q1 * NumQ.q1 - 2 * NumQ.q2 * NumQ.q2; /*矩阵(3,3)项*/
float yaw_G = gyroAccel->gyro.gyroZ * Gyro_G; // 将Z轴角速度陀螺仪值 转换为Z角度/秒 Gyro_G陀螺仪初始化量程+-2000度每秒于1 / (65536 / 4000) = 0.03051756*2
if((yaw_G > 0.5f) || (yaw_G < -0.5)) // 数据太小可以认为是干扰,不是偏航动作
{
eulerAngle->yaw += yaw_G * dt; // 角速度积分成偏航角
}
eulerAngle->pitch = asin(vecxZ) * RtA; // 俯仰角
eulerAngle->roll = atan2f(vecyZ, veczZ) * RtA; // 横滚角
normAccz = gyroAccel->accel.accelX * vecxZ + gyroAccel->accel.accelY * vecyZ + gyroAccel->accel.accelZ * veczZ; /*Z轴垂直方向上的加速度,此值涵盖了倾斜时在Z轴角速度的向量和,不是单纯重力感应得出的值*/
}
/**
* @description: 获取Z轴上的加速度 (如果已经倾斜,会考虑z轴上加速度的合成)
* @return {*}
*/
float Common_IMU_GetNormAccZ(void)
{
return normAccz;
}
/* ======================欧拉角计算================================== */
/* ========================结束==================================== */
.h定义欧拉角和四元数结构体:
/* 欧拉角 */
typedef struct
{
float pitch;
float roll;
float yaw;
} EulerAngle_Struct;
/* 表示四元数的结构体 */
typedef struct
{
float q0;
float q1;
float q2;
float q3;
} Quaternion_Struct;
三个宏方便做转换。
三.测试欧拉角解算
获取欧拉角后观察打印数据。
静止:
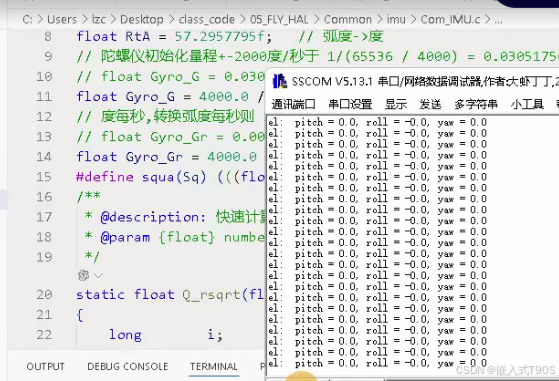
运动:
因为滤波的存在回到之前状态需要一定时间。
偏航角会有累计误差:
陀螺仪本身缺陷。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









