






文章目录
一.高级定时器输出配置问题
1.用高级定时器TIM1/TIM8输出PWM波时,必须将其OC配置完整!!!!
//TIM_OCStructInit(&TIM_OCInitStructure); //初始化Pwm通道TIM8_CH_OC1/2/3/4——并且全部配置!!! //或者在前面使用TIM_OCStructInit(&TIM_OCInitStructure); TIM_OCStructInit(&TIM_OCInitStructure); TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器冲值为0 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置PWm模式1 CNT<CCR为有效电平 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置有效电平输出极性为高极性 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //使能输出比较状态使能输出到端口 TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable; //使能输出比较N状态 TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset; //当 MOE=0 重置 TIM1 输出比较空闲状态 TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset; //当 MOE=0 重置 TIM1 输出比较 N 空闲状态 TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High; //TIM1 输出比较N极性高 TIM_OC1Init(TIM8,&TIM_OCInitStructure);//配置TIM8的四个通道输出PWM TIM_OC2Init(TIM8,&TIM_OCInitStructure); TIM_OC3Init(TIM8,&TIM_OCInitStructure); TIM_OC4Init(TIM8,&TIM_OCInitStructure); 配置完成之后pwm才能正常输出!!
二.仿真调试
1.数据不能实时更新的问题
解决方法:打开调试之后-->点击view-->最后的update勾选。(之后watch里的输出变量就能实时更新啦!!)
注意:watch里面的变量当然是全局变量才能监测!!!
三.闭环的代码问题
有篇文章还是不错的https://blog.csdn.net/qq_44343584/article/details/122318756
pwm.h
#ifndef __PWM_H
#define __PWM_H
#include "sys.h"
void PWM_Init_TIM8(u16 arr, u16 psc);
void change_pwm(u16 i);
#define AIN2 PBout(12)
#define AIN1 PBout(13)
#define BIN1 PBout(14)
#define BIN2 PBout(15)
#define ain2 PEout(12)
#define ain1 PEout(13)
#define bin1 PEout(14)
#define bin2 PEout(15)
#endif
pwm.c
#include "pwm.h"
//#include "Device/Include/stm32f10x.h" // Device header
void PWM_Init_TIM8(u16 arr, u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义一个引脚初始化的结构体
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStrue; //定义一个定时中断的结构体
TIM_OCInitTypeDef TIM_OCInitStructure; //定义一个 PWM 输出的结构
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_TIM8|RCC_APB2Periph_GPIOE,
ENABLE);//PB/E控制电机IO,TIM8控制pwm输出引脚
//控制方向引脚
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; //引脚输入输出模式为推挽输出模式
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //引脚输出速度为 50MHZ
GPIO_Init(GPIOB,&GPIO_InitStructure);//根据上面设置好的GPIO_InitStructure参数初始化引脚
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; //引脚输入输出模式为推挽输出模式
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //引脚输出速度为 50MHZ
GPIO_Init(GPIOE, &GPIO_InitStructure);//根据上面设置好的GPIO_InitStructure参数初始化引脚
//pwm引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
//初始化高级定时器TIM8
TIM_TimeBaseInitStrue.TIM_Period=arr;
//自动重装载值
TIM_TimeBaseInitStrue.TIM_Prescaler=psc;
//预分频系数
TIM_TimeBaseInitStrue.TIM_ClockDivision=TIM_CKD_DIV1; //
TIM_TimeBaseInitStrue.TIM_CounterMode=TIM_CounterMode_Up//向上计数
TIM_TimeBaseInit(TIM8,&TIM_TimeBaseInitStrue);
//初始化Pwm通道TIM8_CH_OC1/2/3/4
TIM_OCInitStructure.TIM_Pulse = 0;//设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //使能输出比较状态 //
使能输出到端口
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;//使能输出比较N状态
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset;//当 MOE=0 重置 TIM1 输出
比较空闲状态
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset;//当 MOE=0 重置 TIM1 输
出比较 N 空闲状态
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;//TIM1 输出比较N极性高
TIM_OC1Init(TIM8,&TIM_OCInitStructure);
TIM_OC2Init(TIM8,&TIM_OCInitStructure);
TIM_OC3Init(TIM8,&TIM_OCInitStructure);
TIM_OC4Init(TIM8,&TIM_OCInitStructure);
//使能TIM8在CCR1上的预装载寄存器
TIM_OC1PreloadConfig(TIM8, TIM_OCPreload_Enable);
TIM_OC2PreloadConfig(TIM8, TIM_OCPreload_Enable);
TIM_OC3PreloadConfig(TIM8, TIM_OCPreload_Enable);
TIM_OC4PreloadConfig(TIM8, TIM_OCPreload_Enable);
TIM_CtrlPWMOutputs(TIM8,ENABLE);//高级定时器的使能函数
TIM_ARRPreloadConfig(TIM8,ENABLE);//使能TIM8 ARR上的预装载寄存器
TIM_Cmd(TIM8, ENABLE);//使能TIM8
}
注意:
1. TIM_CtrlPWMOutputs(TIM8,ENABLE);//配置高级定时器这一句必须有!!
2.配置高级定时器需要将TIM_OC1Init()函数的结构体成员全部赋初值!!!否则无法运行
(可以在新建的结构体数据类型变量下面使用TIM_OCStructInit(&TIM_OCInitStructure))
encoder.h(编码器)
#ifndef __ENCODER_H
#define __ENCODER_H
#include "sys.h"
#include "pwm.h"
extern int Encoder_TIM;
void Encoder_Init_TIM2(void);
void Encoder_Init_TIM3(void);
void Encoder_Init_TIM4(void);
void Encoder_Init_TIM5(void);
void Encoder_Init_TIM(void);
int Read_Encoder(u8 TIMX);
#endif
encoder.c
#include "encoder.h"
//#include "Device/Include/stm32f10x.h"// Device header
void Encoder_Init_TIM2(void)
{
// GPIO_InitTypeDef GPIO_InitStructure;//初始化GPIO-->PA0/PA1
// TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
// TIM_ICInitTypeDef TIM_ICInitStruct;
//
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//使能GPIOA时钟
// RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//使能TIM2_CH1/2-->PA0/1
//
// GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
// GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1;
// GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
// GPIO_Init(GPIOA,&GPIO_InitStructure);
//以上是发现了TIM2和TIM5的CH1和CH2的IO冲突了使用重映射了TIM2的通道
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_ICInitTypeDef TIM_ICInitStruct;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO|RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB,
ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
GPIO_PinRemapConfig(GPIO_FullRemap_TIM2 ,ENABLE );
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);//重映射TIM2就要禁用这个IO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//初始化TIM2
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;//TIM向上计数模式
TIM_TimeBaseInitStruct.TIM_Period = 65534;//配置自动重装载寄存器的值
TIM_TimeBaseInitStruct.TIM_Prescaler = 0;//配置定时器时钟分频
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频
TIM_TimeBaseInitStruct.TIM_RepetitionCounter=0; //重复计数器无效0
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStruct);
//配置输入通道一
TIM_ICInitStruct.TIM_Channel = TIM_Channel_1;
TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1; //输入器不分频
TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到IC1
TIM_ICInitStruct.TIM_ICFilter = 0; //不滤波
TIM_ICInit(TIM2, &TIM_ICInitStruct);
//初始化通道二
TIM_ICInitStruct.TIM_Channel = TIM_Channel_2;
TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStruct.TIM_ICFilter = 0;
TIM_ICInit(TIM2, &TIM_ICInitStruct);
TIM_EncoderInterfaceConfig(TIM2, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising); //使用编码器模式 3:CH1、CH2 同时计数,为四分频
TIM_ClearFlag(TIM2, TIM_FLAG_Update); //清理更新标志位
//TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);//使能更新中断
TIM_SetCounter(TIM2,0); //将CNT置零
TIM_Cmd(TIM2, ENABLE); //使能TIM2
}
//TIM3_CH1/2-->PA6/PA7
void Encoder_Init_TIM3(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_ICInitTypeDef TIM_ICInitStruct;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//配置时基
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;
//TIM向上计数模式
TIM_TimeBaseInitStruct.TIM_Period = 65534;
//配置自动重装载寄存器的值
TIM_TimeBaseInitStruct.TIM_Prescaler = 0x0;
//配置定时器时钟分频
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
//时钟分频
TIM_TimeBaseInitStruct.TIM_RepetitionCounter=0;
//重复计数器无效0
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);
//配置输入
TIM_ICInitStruct.TIM_Channel = TIM_Channel_1;
TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1; //输入器不分频
TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到IC1
TIM_ICInitStruct.TIM_ICFilter = 0; //不滤波
TIM_ICInit(TIM3, &TIM_ICInitStruct);
TIM_ICInitStruct.TIM_Channel = TIM_Channel_2;
TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStruct.TIM_ICFilter = 0;
TIM_ICInit(TIM3, &TIM_ICInitStruct);
TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//使能编码器模式3 0x0003
TIM_ClearFlag(TIM3, TIM_FLAG_Update);
TIM_SetCounter(TIM3,0);
TIM_Cmd(TIM3, ENABLE);
}
void Encoder_Init_TIM4(void)// PB6 PB7
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_ICInitTypeDef TIM_ICInitStruct;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//配置时基
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;
//TIM向上计数模式
TIM_TimeBaseInitStruct.TIM_Period = 65534;
//配置自动重装载寄存器的值
TIM_TimeBaseInitStruct.TIM_Prescaler = 0x0;
//配置定时器时钟分频
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
//时钟分频
TIM_TimeBaseInitStruct.TIM_RepetitionCounter=0;
//重复计数器无效0
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseInitStruct);
//配置输入
TIM_ICInitStruct.TIM_Channel = TIM_Channel_1;
TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1;
//输入器不分频
TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising;
//上升沿捕获
TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI;
//映射到IC1
TIM_ICInitStruct.TIM_ICFilter = 0;
//不滤波
TIM_ICInit(TIM4, &TIM_ICInitStruct);
TIM_ICInitStruct.TIM_Channel = TIM_Channel_2;
TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStruct.TIM_ICFilter = 0;
TIM_ICInit(TIM4, &TIM_ICInitStruct);
TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
//使能编码器模式3 0x0003
TIM_ClearFlag(TIM4, TIM_FLAG_Update);
TIM_SetCounter(TIM4,0);
TIM_Cmd(TIM4, ENABLE);
}
void Encoder_Init_TIM5(void)//PA0 PA1
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_ICInitTypeDef TIM_ICInitStruct;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//配置时基
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;
//TIM向上计数模式
TIM_TimeBaseInitStruct.TIM_Period = 65534;
//配置自动重装载寄存器的值
TIM_TimeBaseInitStruct.TIM_Prescaler = 0x0;
//配置定时器时钟分频
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
//时钟分频
TIM_TimeBaseInitStruct.TIM_RepetitionCounter=0;
//重复计数器无效0
TIM_TimeBaseInit(TIM5, &TIM_TimeBaseInitStruct);
//配置输入
TIM_ICInitStruct.TIM_Channel = TIM_Channel_1;
TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1;
//输入器不分频
TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising;
//上升沿捕获
TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI;
//映射到IC1
TIM_ICInitStruct.TIM_ICFilter = 0;
//不滤波
TIM_ICInit(TIM5, &TIM_ICInitStruct);
TIM_ICInitStruct.TIM_Channel = TIM_Channel_2;
TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStruct.TIM_ICFilter = 0;
TIM_ICInit(TIM5, &TIM_ICInitStruct);
TIM_EncoderInterfaceConfig(TIM5, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//使能编码器模式3 0x0003
TIM_ClearFlag(TIM5, TIM_FLAG_Update);
TIM_SetCounter(TIM5,0);
TIM_Cmd(TIM5, ENABLE);
}
//编码器初始化
void Encoder_Init_TIM(void)
{
Encoder_Init_TIM2();
Encoder_Init_TIM3();
Encoder_Init_TIM4();
Encoder_Init_TIM5();
}
//int Encoder_TIM;
//读取不同定时器编码器的CNT值
int Read_Encoder(u8 TIMX)
{
int Encoder_TIM;
switch(TIMX)
{
case 1: Encoder_TIM= (short)TIM1 -> CNT; TIM1 -> CNT=0;break;
case 2: Encoder_TIM= (short)TIM2 -> CNT; TIM2 -> CNT=0;break;
case 3: Encoder_TIM= (short)TIM3 -> CNT; TIM3 -> CNT=0;break;
case 4: Encoder_TIM= (short)TIM4 -> CNT; TIM4 -> CNT=0;break;
case 5: Encoder_TIM= (short)TIM5 -> CNT; TIM5 -> CNT=0;break;
case 8: Encoder_TIM= (short)TIM8 -> CNT; TIM8 -> CNT=0;break;
default: Encoder_TIM=0;
}
return Encoder_TIM; /*CNT清零*/
}
注意:
1.TIM2和TIM5的CH1和CH2重复,使用将TIM2使用了完全重映射!!!(也就是我一开始为什么在TIM2中注释掉那一大段的原因);
2.使用TIM2完全重映射的时候(根据《STM32中文参考手册》和《精英版IO原理图》)
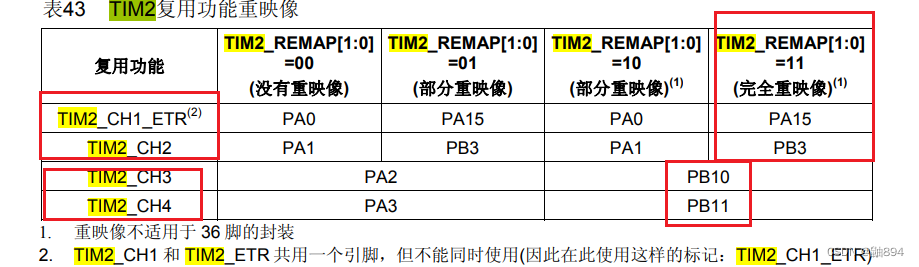
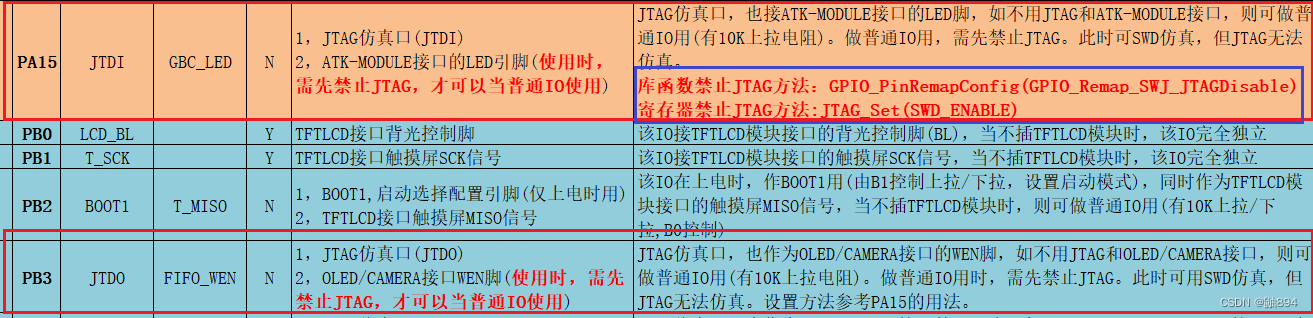
可以看出来原理图中有库函数禁止JTAG的方法!!!
pid.h
#ifndef __PID_H
#define __PID_H
#include "sys.h"
#include "pwm.h"
#include "encoder.h"
//定义一个pid的数据类型
typedef struct
{
float Target; //设定目标值
float Measured; //测量值
float err; //本次偏差值
float err_last; //上一次偏差
float err_beforeLast;
float pwm; //pwm输出
}incrementalpid_t;
extern incrementalpid_t pid[4];
extern int Encoder1;
extern int Target1;
extern int Motor1;
extern int Encoder2;
extern int Target2;
extern int Motor2;
extern int Encoder3;
extern int Target3;
extern int Motor3;
extern int Encoder4;
extern int Target4;
extern int Motor4;
int Incremental_PID1(int Encoder1,int Target1);
int Incremental_PID2(int Encoder2,int Target2);
int Incremental_PID3(int Encoder3,int Target3);
int Incremental_PID4(int Encoder4,int Target4);
void Set_Pwm1(int moto1);
void Set_Pwm2(int moto2);
void Set_Pwm3(int moto3);
void Set_Pwm4(int moto4);
int myabs(int a); //取绝对值
#endif
注意:这里将pid算法中的变量用结构体定义了一个数据类型!!!
下面是重点!!!
pid.c
#include "pid.h"
//#include "Device/Include/stm32f10x.h" // Device header
#define PI 3.14159265
incrementalpid_t pid[4];
float Kp1=9, Ki1=0.8,Kd1=0; //Kp, Ki,Kd控制系数
float Kp2=9, Ki2=0.7,Kd2=0; //Kp, Ki,Kd控制系数
float Kp3=9, Ki3=0.8,Kd3=0; //Kp, Ki,Kd控制系数
float Kp4=9, Ki4=0.7,Kd4=0; //Kp, Ki,Kd控制系数
int Motor1;
int Encoder1;
int Motor2;
int Encoder2;
int Motor3;
int Encoder3;
int Motor4;
int Encoder4;
int Target1;
int Target2;
int Target3;
int Target4;
/**************************************************************************
函数功能:增量PI控制器
入口参数:编码器测量值,目标速度
返回 值:电机PWM
根据增量式离散PID公式
pwm+=Kp[e(k)-e(k-1)]+Ki*e(k)+Kd[e(k)-2e(k-1)+e(k-2)]
e(k)代表本次偏差
e(k-1)代表上一次的偏差 以此类推
pwm代表增量输出
在我们的速度控制闭环系统里面,只使用PI控制
pwm+=Kp[e(k)-e(k-1)]+Ki*e(k)
**************************************************************************/
int Incremental_PID1(int Encoder1,int Target1)
{
pid[0].err=Target1-Encoder1; //计算偏差
pid[0].pwm+=Kp1*(pid[0].err-pid[0].err_last)+Ki1*pid[0].err+Kd1*(pid[0].err-
2*pid[0].err_last+pid[0].err_beforeLast); //增量式PID控制器
//===PWM满幅是7200 限制在7100
if(pid[0].pwm<-7000)
pid[0].pwm = -7000;
else if(pid[0].pwm>7000)
pid[0].pwm = 7000;
pid[0].err_beforeLast=pid[0].err_last;
pid[0].err_last=pid[0].err; //保存上一次偏差
return pid[0].pwm; //增量输出
}
int Incremental_PID2(int Encoder2,int Target2)
{
pid[1].err=Target2-Encoder2; //计算偏差
pid[1].pwm+=Kp2*(pid[1].err-pid[1].err_last)+Ki2*pid[1].err+Kd2*(pid[1].err-
2*pid[1].err_last+pid[1].err_beforeLast); //增量式PID控制器
//===PWM满幅是7200 限制在7100
if(pid[1].pwm<-7000)
pid[1].pwm = -7000;
else if(pid[1].pwm>7000)
pid[1].pwm = 7000;
pid[1].err_beforeLast=pid[1].err_last;
pid[1].err_last=pid[1].err; //保存上一次偏差
return pid[1].pwm; //增量输出
}
int Incremental_PID3(int Encoder3,int Target3)
{
pid[2].err=Target3-Encoder3; //计算偏差
pid[2].pwm+=Kp3*(pid[2].err-pid[2].err_last)+Ki3*pid[2].err+Kd3*(pid[2].err-
2*pid[2].err_last+pid[2].err_beforeLast); //增量式PID控制器
//===PWM满幅是7200 限制在7100
if(pid[2].pwm<-7000)
pid[2].pwm = -7000;
else if(pid[2].pwm>7000)
pid[2].pwm = 7000;
pid[2].err_beforeLast=pid[2].err_last;
pid[2].err_last=pid[2].err; //保存上一次偏差
return pid[2].pwm; //增量输出
}
int Incremental_PID4(int Encoder4,int Target4)
{
pid[3].err=Target4-Encoder4 //计算偏差
pid[3].pwm+=Kp4*(pid[3].err-pid[3].err_last)+Ki4*pid[3].err+Kd4*(pid[3].err-
2*pid[3].err_last+pid[3].err_beforeLast);//增量式PID控制器
//===PWM满幅是7200 限制在7100
if(pid[3].pwm<-7000)
pid[3].pwm = -7000;
else if(pid[3].pwm>7000)
pid[3].pwm = 7000;
pid[3].err_beforeLast=pid[3].err_last;
pid[3].err_last=pid[3].err; //保存上一次偏差
return pid[3].pwm; //增量输出
}
void Set_Pwm1(int moto1)//赋值给PWM寄存器
{
if(moto1>0) AIN1=0, AIN2=1;
else AIN1=1, AIN2=0;
TIM8->CCR1=myabs(moto1);
}
void Set_Pwm2(int moto2)//赋值给PWM寄存器
{
if(moto2>0) BIN1=0, BIN2=1;
else BIN1=1, BIN2=0;
TIM8->CCR2=myabs(moto2);
}
void Set_Pwm3(int moto3)//赋值给PWM寄存器
{
if(moto3>0) ain1=1, ain2=0;
else ain1=0, ain2=1;
TIM8->CCR3=myabs(moto3);
}
void Set_Pwm4(int moto4)//赋值给PWM寄存器
{
if(moto4>0) bin1=1, bin2=0;
else bin1=0, bin2=1;
TIM8->CCR4=myabs(moto4);
}
int myabs(int a) //取绝对值
{
int temp;
if(a<0) temp=-a;
else temp=a;
return temp;
}
最后是一个重中之重!!!!
将encoder/pwm/pid放在一个定时中断服务函数中!!!
timer.c
#include "timer.h"
#include "Device/Include/stm32f10x.h" // Device header
#include "pwm.h"
#include "encoder.h"
#include "pid.h"
void TIM6_Init(u16 arr, u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
/* 配置时基结构体 */
NVIC_InitTypeDef NVIC_InitStruct;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM6, ENABLE);//使能定时器时钟
TIM_TimeBaseStructure.TIM_Prescaler = psc; //配置定时器时钟分频
TIM_TimeBaseStructure.TIM_Period = arr; //配置自动重装载寄存器的值
TIM_TimeBaseStructure.TIM_ClockDivision =0; //时钟分割
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM6, &TIM_TimeBaseStructure); //初始化TIM6时间基数单位
TIM_ClearFlag(TIM6, TIM_FLAG_Update); //清除更新中断,防止一打开中断立马产生中断
TIM_ITConfig(TIM6, TIM_IT_Update, ENABLE); //打开定时器更新中断
/*配置中断优先级*/
NVIC_InitStruct.NVIC_IRQChannel = TIM6_IRQn; //使能外部中断通道
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1; //抢占优先级1
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 2; //响应优先级3
NVIC_Init(&NVIC_InitStruct);
TIM_Cmd(TIM6, ENABLE); //使能定时器
}
void TIM6_IRQHandler(void)
{
if(TIM_GetFlagStatus(TIM6,TIM_FLAG_Update)==SET)
{
TIM_ClearITPendingBit(TIM6,TIM_IT_Update); //===清除定时器1中断标志位
Encoder1=Read_Encoder(2); //取定时器2计数器的值
Encoder2=Read_Encoder(3); //取定时器4计数器的值
Encoder3=Read_Encoder(4);
Encoder4=Read_Encoder(5);
// Led_Flash(100); //LED闪烁
Motor1=Incremental_PID1(Encoder1,Target1); //===位置PID控制器
Motor2=Incremental_PID2(Encoder2,Target2);
Motor3=Incremental_PID3(Encoder3,Target3);
Motor4=Incremental_PID4(Encoder4,Target4);
Set_Pwm1(Motor1);
Set_Pwm2(Motor2);
Set_Pwm3(Motor3);
Set_Pwm4(Motor4);
// PID_Output();
// PID_Output1();
}
}
就此基本实现闭环!!!
上阶段余留任务:双舵机控制实现&编码器测值在仿真实时更新输出
本阶段实现任务:驱动四个电机&驱动舵机控制夹子&基本闭环
存在的一些问题:在哪给CCR设初值&四路编码器只能测出一个数值&仿真环境的使用
下一阶段任务:学习上位机使用&闭环代码完善&学习麦克纳姆轮&遥控驱动小车&红外寻迹&视觉沟通&电池给板子供电















 2310
2310











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









