






无人车部分
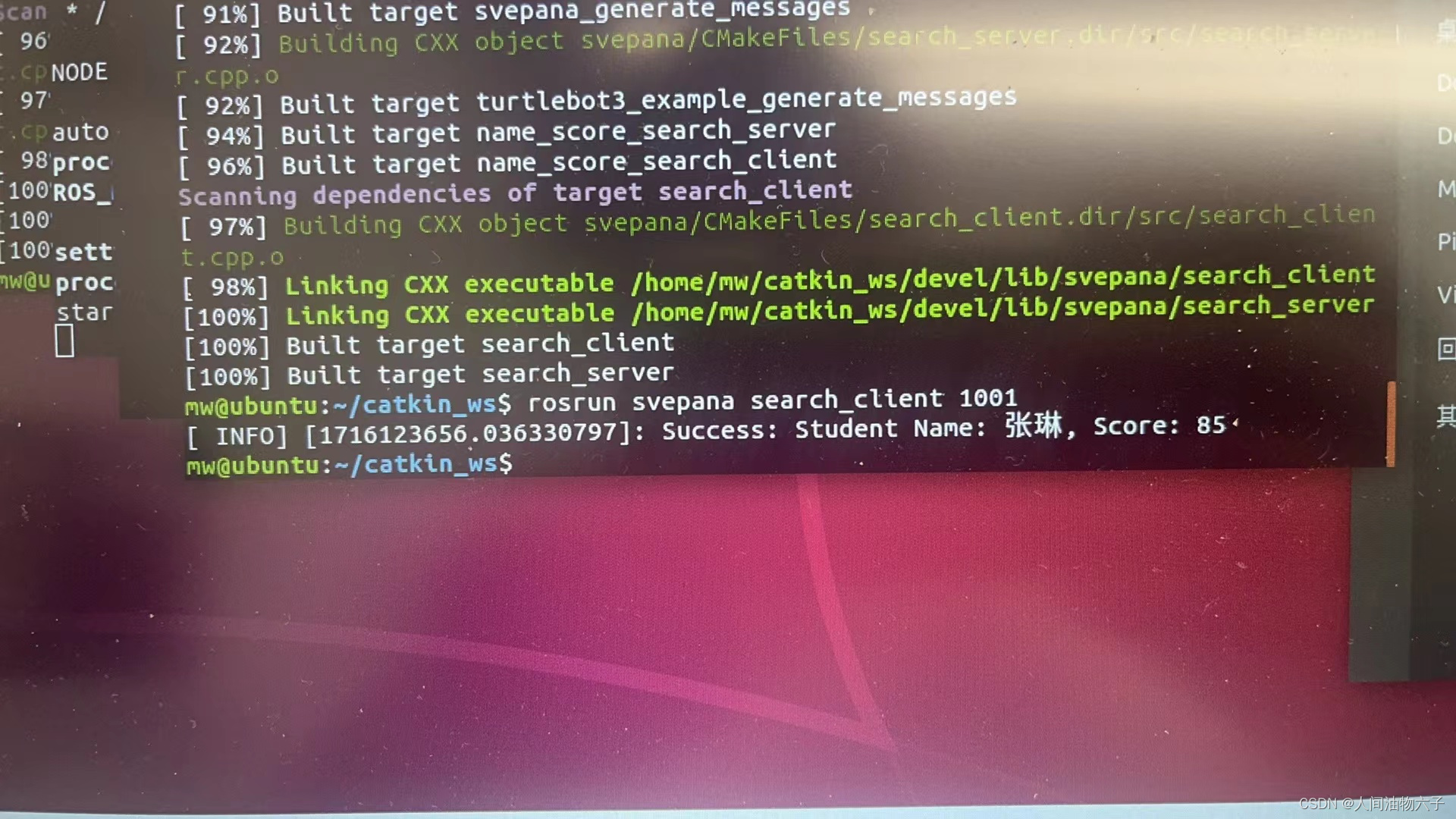
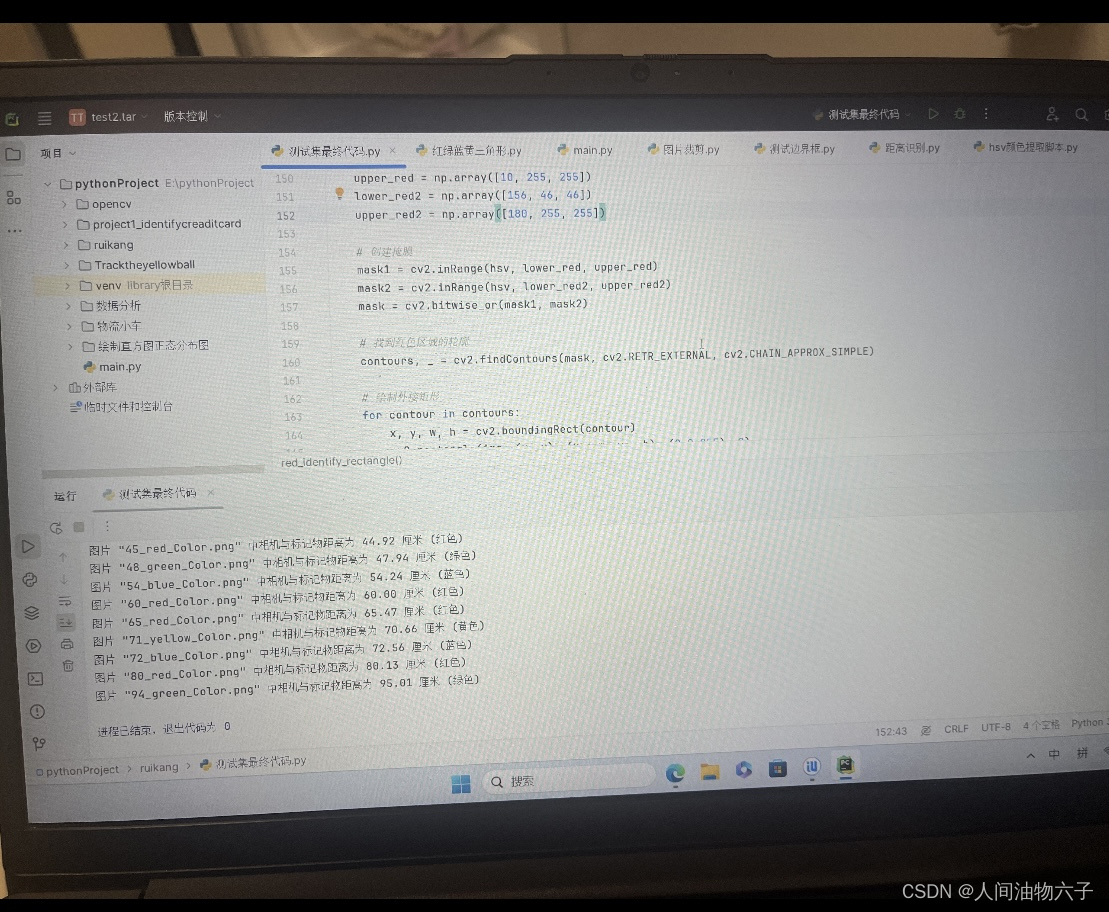
4.ros及opencv学习,本周主要学习rosserver及client。cv代码编写。后续开始无人车调试以及场地搭建。
5.无人车省赛主要考察ros基本操作以及视觉代码。无人机主要考察视觉识别部分。
6.ros操作部分无法显示中文字符,冷色调图片cv代码难以检测边缘。
7.解决难题方案。
1.源码添加中文转译代码。
2.调参,更换hsv参数。
无人机部分
1.——5.26熟悉无人机操控,学习遥控器使用,使用说明中无人机建图功能,学习使用文档以及ros基本操作。
2.本周基本完成第一部分的内容,下周需开始赛题学习以及实践操作。
3.本人负责视觉部分,陈ht负责ros操作及调整无人机初始参数,赵yk负责机械部分。
4..ros及opencv学习,本周主要学习rosserver及client。cv代码编写。下周开始无人机调试以及场地搭建。
5.规则中主要应注意无人机射击前的停靠位置,停靠位置有不一样的图片,应根据比赛时情况调整。
6.所遇问题以及难点
1.无人机起飞偏向一边 解决方案:根据使用说明链接遥控器调整归零
2.无人机连接 解决方案:查看校园网络是否为同一人,应当连接同一个人的校园网。















 612
612

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









