










多源融合——Mahony互补滤波详述
目录
引言
传统的姿态传感器有陀螺仪、磁力计和加速度计,由于陀螺仪是一种相对测量,存在误差累积。磁力计可以绝对测量航向,加速度计则可以绝对测量俯仰角和横滚角。因此,将三种传感器结合可以提供准确的载体姿态,三者往往采用互补滤波方式进行融合。互补滤波作用面非常广,可以用于无人机、智能手机等的定姿,但是目前相关博文介绍多从无人机视角出发,对于传统测绘学生来说具有一定的障碍。因此,本文主要结合智能手机端matlab相关代码介绍博主对于Mahony滤波的理解。
基础知识
在表示由载体坐标系(body frame,b系)到导航坐标系(navigation frame,n系)时常见的物理量有欧拉角、方向余弦矩阵和四元数,这里我们主要介绍四元数方法。
四元数q是由一个实部和三个虚部共四个元素组成的四维数组,表示为(为了简洁,q均采用q代替,具有数字的则为对应元素)
q
=
[
q
1
q
2
q
3
q
4
]
=
=
q
0
+
q
1
i
+
q
2
j
+
q
3
j
+
q
4
k
=
q
0
+
q
v
q=\left[ \begin{matrix} q_1\\ q_2\\ q_3\\ q_4\\ \end{matrix} \right]==q_0+q_1i+q_2j+q_3j+q_4k=q_0+q_v
q=
q1q2q3q4
==q0+q1i+q2j+q3j+q4k=q0+qv
其中,
q
1
q_1
q1为实部,
q
2
到
q
4
q_2到q_4
q2到q4为虚部(
q
v
q_v
qv),并且定义
i
⊗
i
=
−
1
,
j
⊗
j
=
−
1
,
k
⊗
k
=
−
1
i
⊗
j
=
k
,
j
⊗
i
=
−
k
,
k
⊗
j
=
−
i
i
⊗
k
=
−
j
,
j
⊗
k
=
i
,
k
⊗
i
=
j
1
⊗
i
=
i
⊗
1
=
i
,
1
⊗
j
=
j
⊗
1
=
j
,
1
⊗
k
=
k
⊗
1
=
k
i \otimes i=-1,j \otimes j=-1,k \otimes k=-1\\ i \otimes j=k,j \otimes i=-k,k \otimes j=-i\\ i \otimes k=-j,j \otimes k=i,k \otimes i=j\\ 1 \otimes i=i \otimes 1=i,1 \otimes j=j \otimes 1=j,1 \otimes k=k \otimes 1=k\\
i⊗i=−1,j⊗j=−1,k⊗k=−1i⊗j=k,j⊗i=−k,k⊗j=−ii⊗k=−j,j⊗k=i,k⊗i=j1⊗i=i⊗1=i,1⊗j=j⊗1=j,1⊗k=k⊗1=k
并且以矩阵形式定义四元数乘
p
⊗
q
p \otimes q
p⊗q
p
⊗
q
=
[
p
1
−
p
2
−
p
3
−
p
4
p
2
p
1
−
p
4
p
3
p
3
p
4
p
1
−
p
2
p
4
−
p
3
p
2
p
1
]
[
q
1
q
2
q
3
q
4
]
p \otimes q=\left[ \begin{matrix} p_1 & -p_2 & -p_3 & -p_4 \\ p_2 & p_1 & -p_4 & p_3 \\ p_3 & p_4 & p_1 & -p_2 \\ p_4 & -p_3 & p_2 & p_1 \\ \end{matrix} \right] \left[ \begin{matrix} q_1\\ q_2\\ q_3\\ q_4\\ \end{matrix} \right]
p⊗q=
p1p2p3p4−p2p1p4−p3−p3−p4p1p2−p4p3−p2p1
q1q2q3q4
或
p
⊗
q
=
[
q
1
−
q
2
−
q
3
−
q
4
q
2
q
1
q
4
−
q
3
q
3
−
q
4
q
1
q
2
q
4
q
3
−
q
2
q
1
]
[
p
1
p
2
p
3
p
4
]
p \otimes q=\left[ \begin{matrix} q_1 & -q_2 & -q_3 & -q_4 \\ q_2 & q_1 & q_4 & -q_3 \\ q_3 & -q_4 & q_1 & q_2 \\ q_4 & q_3 & -q_2 & q_1 \\ \end{matrix} \right] \left[ \begin{matrix} p_1\\ p_2\\ p_3\\ p_4\\ \end{matrix} \right]
p⊗q=
q1q2q3q4−q2q1−q4q3−q3q4q1−q2−q4−q3q2q1
p1p2p3p4
此外,对于任意单位四元数都有
q
=
q
0
+
q
v
=
cos
(
θ
2
)
+
u
sin
(
θ
2
)
q=q_0+q_v=\cos(\frac{\theta}{2})+u\sin(\frac{\theta}{2})
q=q0+qv=cos(2θ)+usin(2θ)
对于任意三维向量v,算子
L
q
(
v
)
=
q
⊗
v
⊗
q
∗
L_q(v)=q \otimes v\otimes q^*
Lq(v)=q⊗v⊗q∗
的作用等效于使向量v绕向量u的正方向旋转角度
θ
\theta
θ,
q
∗
q^*
q∗为共轭四元数,即实部不变,虚部取负号。
最后,我们定义b系右前上,n系东北天,
q
b
n
q_b^{n}
qbn则代表由b系到n系的四元数,为方便起见,用q代替
q
b
n
q_b^{n}
qbn。
原理与代码实现
我们以http://www.x-io.co.uk/node/8#open_source_ahrs_and_imu_algorithms网站发布的Mahony代码为例进行原理介绍,下面介绍Mahony代码的流程。
(1)利用GetSensorData读取手机AHRS姿态,转为四元数。

(2)预测当前时刻四元数。
q
˙
=
1
2
q
^
k
−
1
W
k
\dot q=\frac{1}{2}\hat q_{k-1}W_k
q˙=21q^k−1Wk
q
k
−
=
q
^
k
−
1
+
q
˙
∗
δ
t
q_k^-=\hat q_{k-1}+\dot q*\delta t
qk−=q^k−1+q˙∗δt
其中,
q
k
−
q_{k}^-
qk−和
q
^
k
−
1
\hat q_{k-1}
q^k−1代表历元k和k-1时的先验状态和后验状态,
W
k
W_k
Wk则为陀螺仪观测值。

(3)标准化加速度计和磁力计数据。
该步的目的:(1)为了降低噪声的影响,因为都涉及到寻找方向的比例关系,可以近似忽略较小数值的影响;(忘了是在哪篇论文里看过了,欢迎补充)(2)为步骤(5)统一量纲,并得到近似误差。

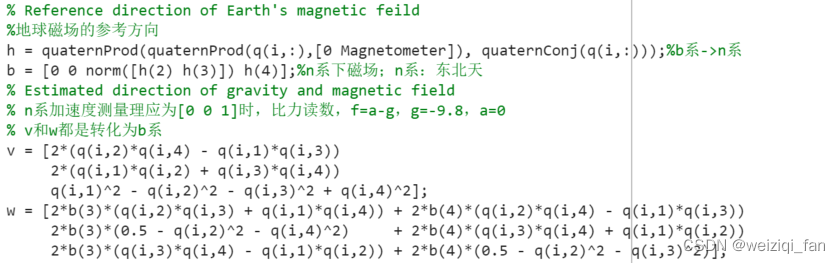
(4)描述重力加速度和磁场方向。
需要注意的是:(a)楼主在北半球,磁场方向由南指向北,则在n系下对应 b(3) 和 b(4) 有数值,东方向近似为0,并且 b(4) 小于0。(b)加速度计获取的是包含重力加速度的加速度数值,则静止状态下只存在天向的+9.81m/s^2,归一化后为[0, 0, 1]。(c)在第(5)步中要与归一化后的加速度计和磁力计数据进行对比,所以此时的v和w为近似的磁场观测值b和加速度计读数在b系下的观测值(即将观测值b等从载体系转到导航系)。
(5)计算外积。
向量外积公式
a
×
v
=
∣
a
∣
∣
v
∣
sin
θ
a \times v=\lvert a\rvert \lvert v\rvert \sin \theta
a×v=∣a∣∣v∣sinθ,当a和v均为单位向量时,外积结果近似为姿态误差,姿态误差是两种传感器数据外积之和。

(6)补偿,其中Kp和Ki是调节参数,调节这两个参数对最终定位精度影响较大,类似于PDI控制器(比例-积分控制器),对于这方面了解太少,具体含义不太清楚,能用就好。

(7)计算最终四元数结果
q
^
k
\hat q_{k}
q^k

至此,Mahony算法流程介绍完毕,上述步骤中(4)-(6)就是互补滤波实现三种传感器融合的关键,将地球有关向量,如磁场向量、重力向量在磁力计和加速度计中的理论观测值转到b系下,与实际磁力计和加速度计观测值求差再进行补偿,补充了陀螺仪相对测量的不足。
参考文献
1、源码:http://www.x-io.co.uk/node/8#open_source_ahrs_and_imu_algorithms
2、武汉大学牛小骥老师惯导课程:https://space.bilibili.com/521626836?spm_id_from=333.337.search-card.all.click

















 5067
5067

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









