







CH579介绍
芯片概述:
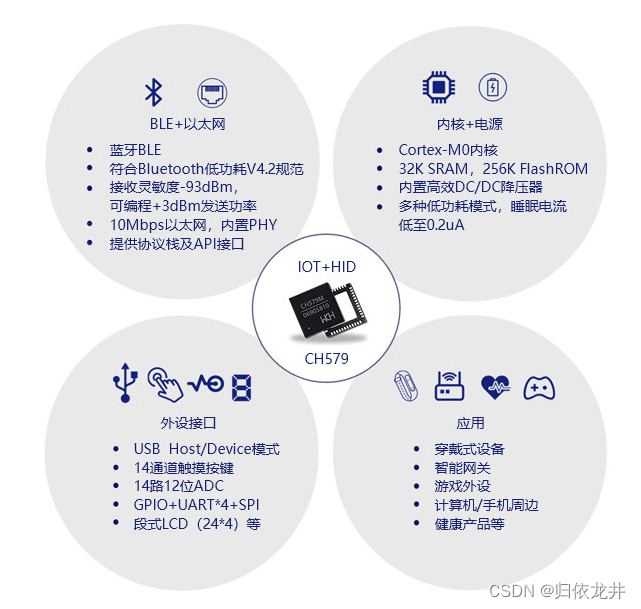
CH579M是集成BLE无线通讯的ARM内核32位微控制器。片上集成有低功耗蓝牙BLE通讯模块、以太网控制器及收发器、全速USB主机和设备控制器及收发器、段式LCD驱动模块、ADC、触摸按键检测模块、RTC等丰富的外设资源。
芯片框图:
摇杆原理
双轴摇杆传感器模块一般在无人机、电玩、遥控车等设备上应用广泛,以前很多带有屏幕的设备也经常使用摇杆传感器作为菜单选择的输入控制(现在基本都用触摸面板替代这个方案)。这里分享一个双轴摇杆传感器模块坐标数据采集过程。这个传感器具有两路模拟输出(分别对应X、Y方向摇杆较中心位置偏移程度),1路数字输出(用于确认按钮是否按下)。
双轴按键摇杆主要由两个电位器和一个按键开关组成,两个电位器随着摇杆扭转角度分别输出X、Y轴上对应的电压值,在Z轴方向上按下摇杆可触发轻触按键。在配套机械结构的作用下,无外力扭动的摇杆初始状态下,两个电位器都处在量程的中间位置。
一般摇杆模块摇杆有5个引脚,分别是标准电压VCC和GND,X、Y方向模拟信号输出脚,Z方向数字信号输出脚。X、Y模拟信号输出原理是摇杆模块内部有一个双向十字的10K电阻器,模块使用5V(或3.3V)供电,在原始状态(摇杆处于正中间未触发)时,X、Y模拟脚读出电压约为2.5V(或1.7V),当摇杆往某个方向推动,输出的相应轴电压值将会相应地增加或减小。Z方向数字信号用于确认是否按下(用模拟量来判断也行,按下为0)。
示例代码
模拟量采集程序
这部分很简单,就是初始化 + 初始量采集。当然在之前要对管脚定义和设置,这个过程都很简单只需要注意不同单片机可能会存在管脚复用功能,这个时候需要先配置相关寄存器才能使用模拟量采集功能,我这里没有复用直接设置成模拟输入“GPIO_ModeIN_Floating”。这里的管脚设置并不是对采集管脚初始化设置,这个GPIO_Pin_5是这款单片机模拟量的标准脚,相当于一个相对“零电压”,不是采集脚,不是采集
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 370
370











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









