







选择这块Arduino板主要是因为它便宜(淘宝上20元左右搞定),引脚相对较多,体积小,而且其使用的处理器核心ATmega32U4(兼容Arduino Leonardo)可用于模拟HID设备,可以配合其它传感器模块做键鼠输入
一、下载开发板定义
先在Arduino IDE中,点击“文件”→“首选项”,在“附加开发板管理器网址”当中输入以下内容并保存
https://raw.githubusercontent.com/sparkfun/Arduino_Boards/master/IDE_Board_Manager/package_sparkfun_index.json
然后在IDE主界面点击“工具”→“开发板……”→“开发板管理器”,安装“SparkFun AVR Boards”
最后在“工具”→“开发板……”中选中“SparkFun Pro Micro”,并在“处理器……”中根据板子尾部晶振上标注的频率选中对应的处理器即可(一般是ATmega32U4 5V 16MHz)
二、引脚定义
如下图:
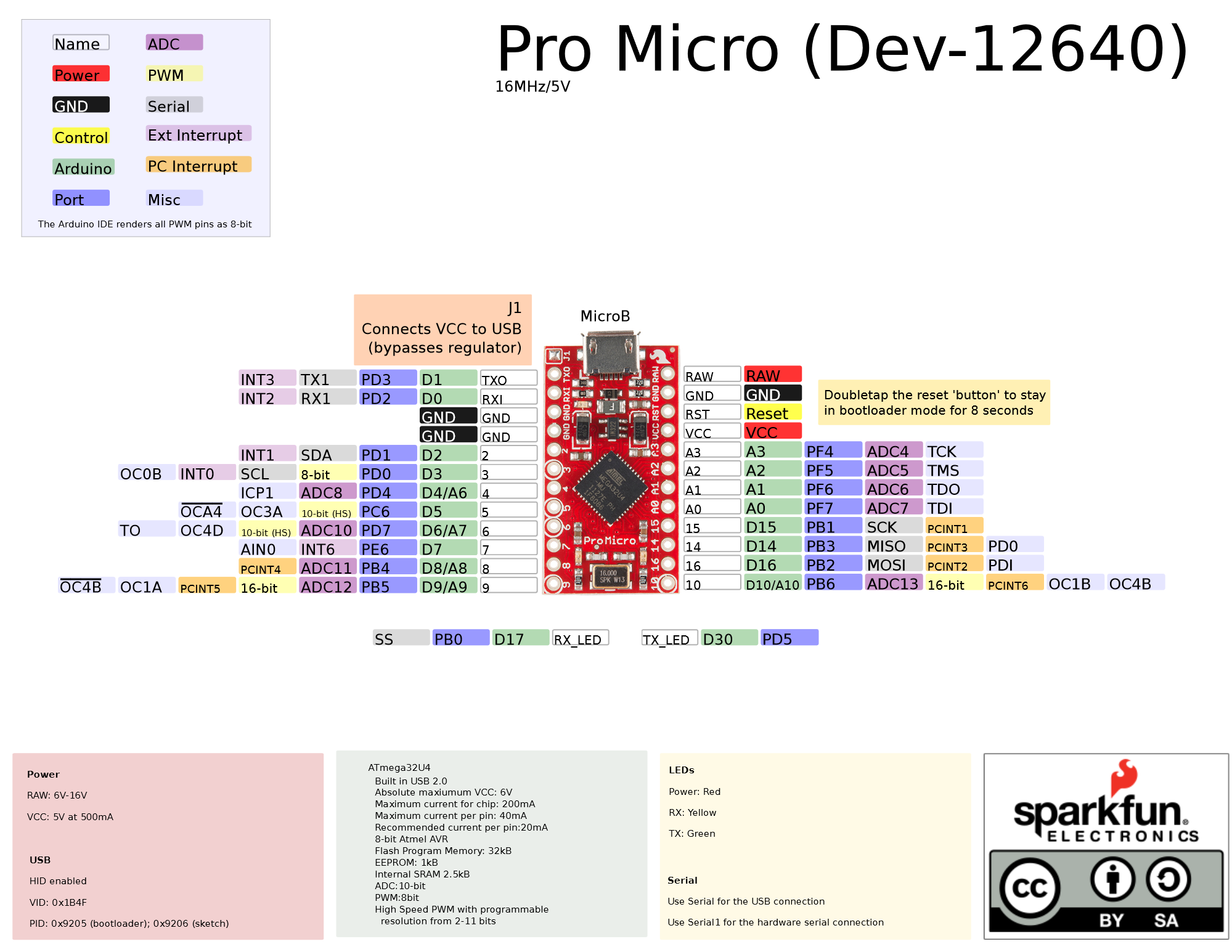
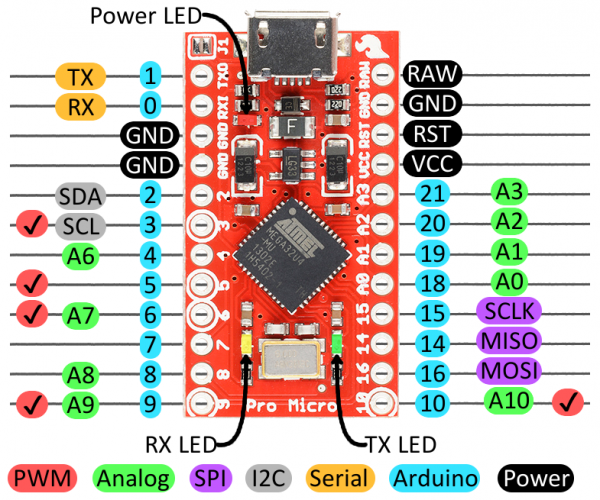
其中左上脚常亮的LED灯是电源指示灯,目前没有找到手动关闭的方法
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6649
6649

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









