






 这篇博客介绍了考古级的日本随身听所使用的超薄直流无刷电机,其厚度仅为5.60mm,配备LB1979V驱动芯片,支持0~3000转/min的转速调节,具有高精度和长寿命的特点。电机的调速通过15脚实现,COM端用于反馈,硬件控制转速。该电机适用于对体积和性能要求极高的应用场合。
这篇博客介绍了考古级的日本随身听所使用的超薄直流无刷电机,其厚度仅为5.60mm,配备LB1979V驱动芯片,支持0~3000转/min的转速调节,具有高精度和长寿命的特点。电机的调速通过15脚实现,COM端用于反馈,硬件控制转速。该电机适用于对体积和性能要求极高的应用场合。
考古级产品,日本随身听。
驱动电机,如下图,厚度5.60mm,截面半径22mm。(目前见过最薄的电机)


电机特性:
1、直流无刷;
2、三相Y型;
3、驱动芯片:LB1979V(日本三洋的产品);
4、转速:0~3000转/min;
5、电压范围1.8~3.6v;额定电压2.5V;
6、电流:无负荷32mA,最大70mA,最大启动电流500mA;
7、扭矩:最小0.98mN*m;
8、寿命:最小1500h。
驱动电路
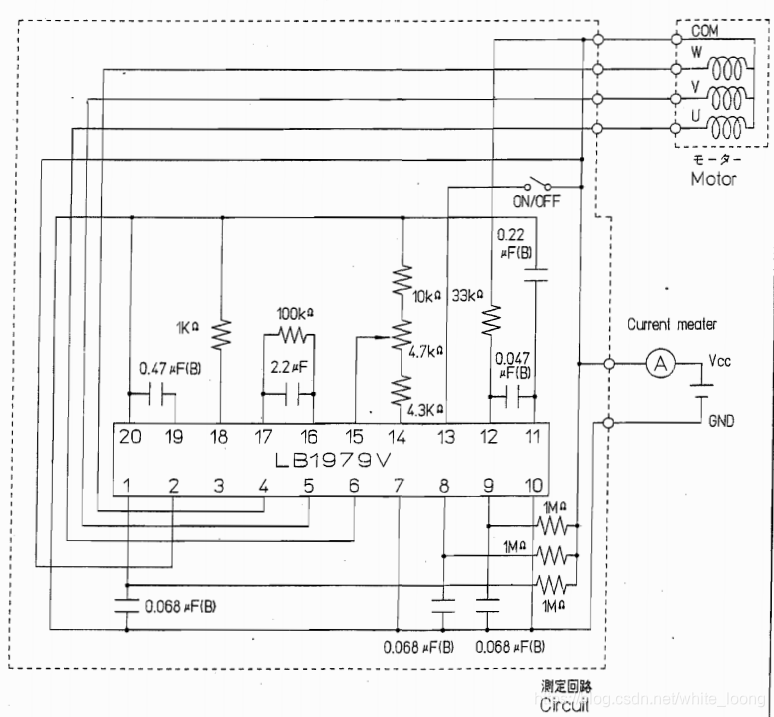
说明:
芯片15脚用来调速,电机COM端引出用来做反馈,硬件调节电机转速。

考古级产品,日本随身听。
驱动电机,如下图,厚度5.60mm,截面半径22mm。(目前见过最薄的电机)
电机特性:
1、直流无刷;
2、三相Y型;
3、驱动芯片:LB1979V(日本三洋的产品);
4、转速:0~3000转/min;
5、电压范围1.8~3.6v;额定电压2.5V;
6、电流:无负荷32mA,最大70mA,最大启动电流500mA;
7、扭矩:最小0.98mN*m;
8、寿命:最小1500h。
驱动电路
说明:
芯片15脚用来调速,电机COM端引出用来做反馈,硬件调节电机转速。
 484
828
484
828

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























