







 本文深入探讨了TMS320F280049C DSP的CPU Timer和中断机制,介绍了硬件不支持中断嵌套的特性,通过软件方法实现中断,并详细解析了三个Timer的区别及中断信号传输方式。同时,提供了TI官方的配置例程和寄存器版例程,展示了如何配置定时器并触发中断。
本文深入探讨了TMS320F280049C DSP的CPU Timer和中断机制,介绍了硬件不支持中断嵌套的特性,通过软件方法实现中断,并详细解析了三个Timer的区别及中断信号传输方式。同时,提供了TI官方的配置例程和寄存器版例程,展示了如何配置定时器并触发中断。
继续280049C的学习,本节讨论CPU和中断。
timer
本DSP在硬件上是不支持中断嵌套的,仅可以通过一些软件的方法实现,具体方法可以参考[4],不过个人感觉没什么必要……
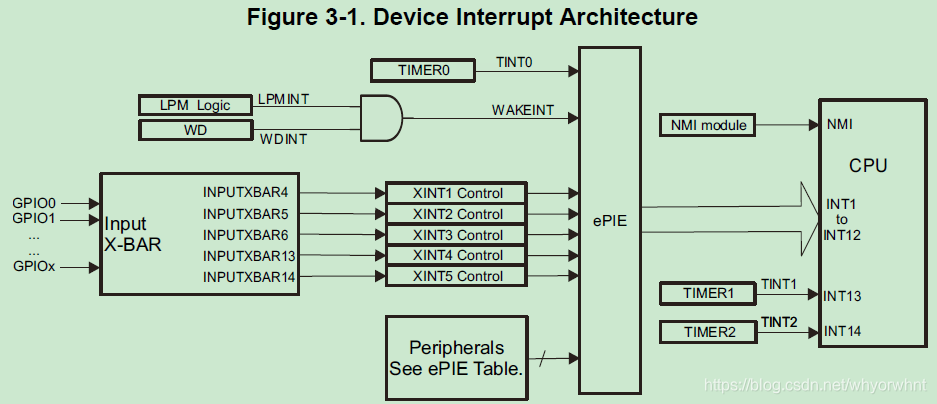
手册[1]对于CPU timer这一部分的介绍着实是有点简单,详细可以参考[3]中的介绍。TIMER2是给实时操作系统预留的,不过用户也可以使用。3个timer之间的区别是中断信号的传输不同,如下图所示,timer0需要经过PIE。
中断
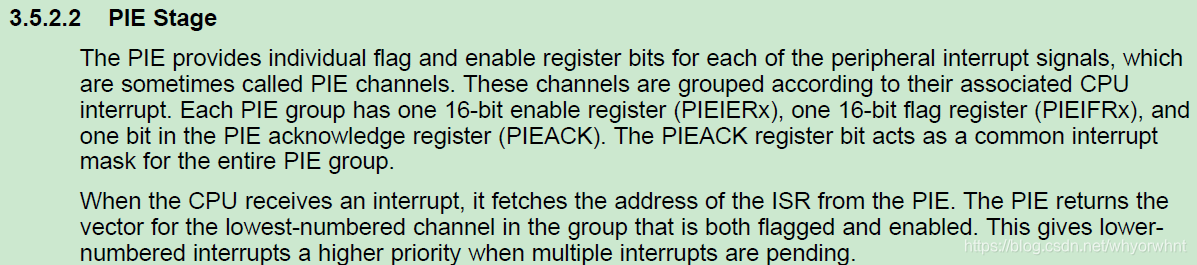
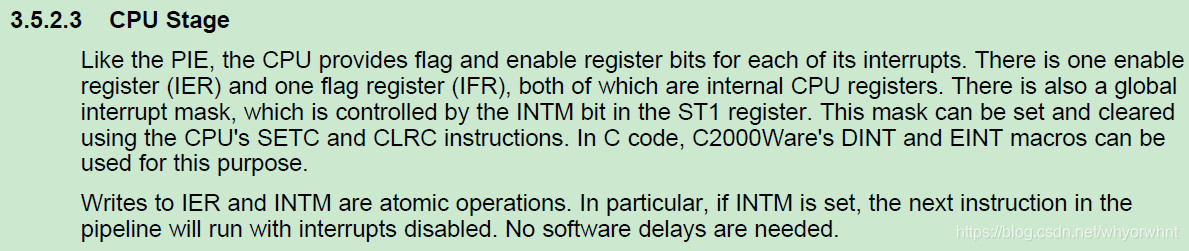
关于中断机制的介绍,也可以参考[3]入门,之后看手册的3.5节。
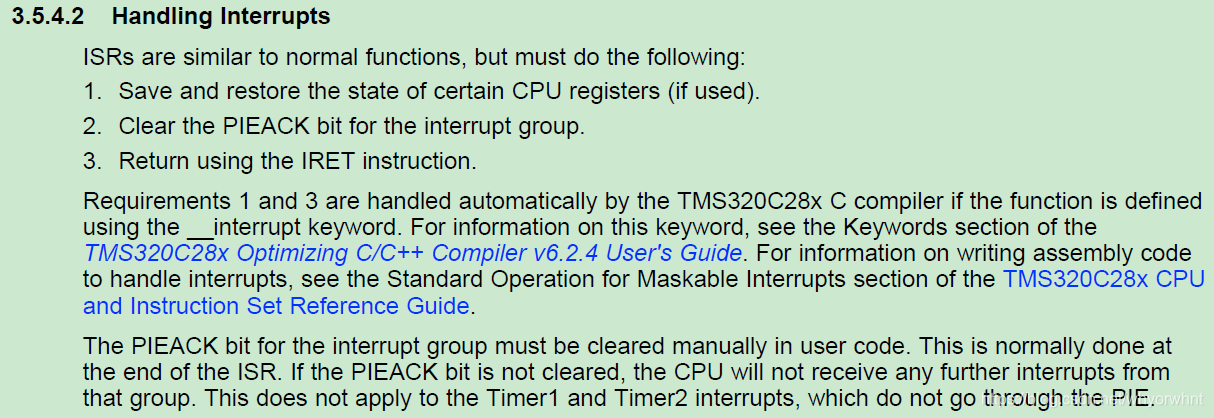
手册中有提到,中断时当前状态的进出栈是编译器自动的,我之前还奇怪怎么没人写进出栈的代码……
timer 例程
关于定时器,TI官方提供了2个配置例程。库函数版在C:\ti\c2000\C2000Ware_2_01_00_00\driverlib\f28004x\examples\timer
寄存器版在C:\ti\c2000\C2000Ware_2_01_00_00\device_support\f28004x\examples\timer
两个例程实现的功能一致,都是配置了定时器并触发中断。
手册中列出了用到的寄存器
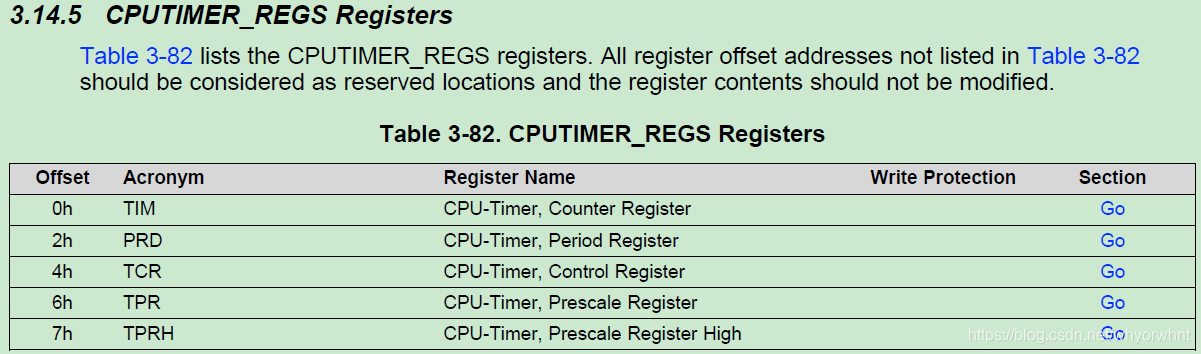
具体含义可参考手册和[2]中的介绍。
#include "F28x_Project.h"
#include "device.h"
#include "math.h"
#define DEVICE_GPIO_PIN_LED1 23U // GPIO number for LD4
#define DEVICE_GPIO_PIN_LED2 34U // GPIO number for LD5
// 计时器中断服务程序ISR
__interrupt void cpuTimer0ISR(void);
__interrupt void cpuTimer1ISR(void);
__interrupt void cpuTimer2ISR(void);
void main(void)
{
// 初始化时钟和外设 Initialize device clock and peripherals
Device_init();
// InitSysCtrl(); //本工程不能使用寄存器的InitSysCtrl();函数初始化。
InitGpio(); //寄存器指令配置,初始化GPIO并设置为推挽输出
GPIO_SetupPinMux(DEVICE_GPIO_PIN_LED1, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(DEVICE_GPIO_PIN_LED1, GPIO_OUTPUT, GPIO_PUSHPULL);
GPIO_SetupPinMux(DEVICE_GPIO_PIN_LED2, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(DEVICE_GPIO_PIN_LED2, GPIO_OUTPUT, GPIO_PUSHPULL);
// 初始化PIE并清空PIE寄存器,关闭CPU中断
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
Interrupt_initModule();
// 初始化PIE向量表
// Initialize the PIE vector table with pointers to the shell Interrupt // Service Routines (ISR).
Interrupt_initVectorTable();
// 初始化外设,这里只初始化计时器
// Initialize the Device Peripheral. For this example, only initialize the Cpu Timers.
InitCpuTimers();
// 映射中断服务程序 Map ISR functions
EALLOW;
PieVectTable.TIMER0_INT = &cpuTimer0ISR;
PieVectTable.TIMER1_INT = &cpuTimer1ISR;
PieVectTable.TIMER2_INT = &cpuTimer2ISR;
EDIS;
// 设置计时器周期
// 100MHz CPU 频率, 1 second 周期 (in uSeconds)
ConfigCpuTimer(&CpuTimer0, 100, 1000000);
ConfigCpuTimer(&CpuTimer1, 100, 600000);
ConfigCpuTimer(&CpuTimer2, 100, 1000000);
// 计时器的控制寄存器 TIE位置1,允许其向CPU请求中断
CpuTimer0Regs.TCR.all = 0x4000;
CpuTimer1Regs.TCR.all = 0x4000;
CpuTimer2Regs.TCR.all = 0x4000;
// Enables CPU int1, int13, and int14 which are connected to CPU-Timer 0,
// CPU-Timer 1, and CPU-Timer 2 respectively.
// Enable TINT0 in the PIE: Group 1 interrupt 7
Interrupt_enable(INT_TIMER0);
Interrupt_enable(INT_TIMER1);
Interrupt_enable(INT_TIMER2);
/*
IER |= M_INT1;
IER |= M_INT13;
IER |= M_INT14;
// Enable TINT0 in the PIE: Group 1 interrupt 7
PieCtrlRegs.PIEIER1.bit.INTx7 = 1; */
// Enable Global Interrupt (INTM) and realtime interrupt (DBGM)
EINT;
ERTM;
float a=cos((float)3.1415926/4); // FPU32
float b=__sin((float)(3.14/4)); // TMU
for(;;)
{
// Turn on LED
// 硬件电路设计是GPIO输出低电平时LED亮
GPIO_writePin(DEVICE_GPIO_PIN_LED1, 0);
// 延迟0.5s Delay for a bit.
DEVICE_DELAY_US(500000);
// Turn off LED
GPIO_writePin(DEVICE_GPIO_PIN_LED1, 1);
// Delay for a bit.
DEVICE_DELAY_US(500000);
}
}
// cpuTimer0ISR - CPU Timer0 ISR with interrupt counter
__interrupt void cpuTimer0ISR(void)
{
CpuTimer0.InterruptCount++;
GPIO_togglePin(DEVICE_GPIO_PIN_LED1);
// Acknowledge this interrupt to receive more interrupts from group 1
// Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP1);
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
}
// cpuTimer1ISR - CPU Timer1 ISR with interrupt counter
__interrupt void cpuTimer1ISR(void)
{
GPIO_togglePin(DEVICE_GPIO_PIN_LED2);
// The CPU acknowledges the interrupt
CpuTimer1.InterruptCount++;
}
// cpuTimer2ISR CPU Timer2 ISR with interrupt counter
__interrupt void cpuTimer2ISR(void)
{
// The CPU acknowledges the interrupt
CpuTimer2.InterruptCount++;
}

















 1266
1266

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









