






非线性悬架,UKF状态估计
软件使用:Matlab Simulink
适用场景:采用模块化建模方法,搭建空气悬架模型,UKF状态估计模型,可实现悬架动挠度等状态估计。
包含:simulink源码文件,详细建模说明文档,对应参考资料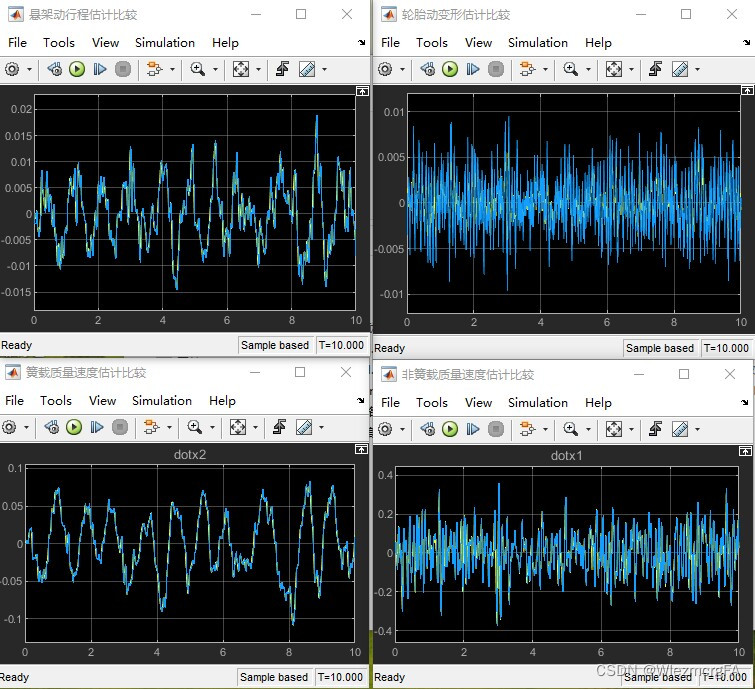
非线性悬架,UKF状态估计
近年来,随着科技的不断发展,汽车行业也在不断的进行技术革新。在悬架系统领域,非线性悬架和UKF状态估计成为了研究的热点。这两种技术可以大幅度提高汽车的驾驶舒适性和安全性。本文将详细介绍非线性悬架和UKF状态估计的原理以及在Matlab Simulink软件上的应用场景和实现方法。
非线性悬架是指悬架系统的特性不是简单的线性关系,而是非线性关系。在传统的线性悬架中,悬架系统的特性与车身质量、弹簧刚度和阻尼系数等因素有关。而非线性悬架则考虑了更多的影响因素,例如路面条件和行驶速度等。这种非线性悬架能够更好地适应不同的路况和行驶条件,提高了汽车的驾驶舒适性。
UKF状态估计是指利用无迹卡尔曼滤波(Unscented Kalman Filter)算法进行状态估计。UKF算法通过对矩阵的非线性变换进行采样点的选择,可以更精确地描述状态变量的概率分布。在悬架系统中,UKF状态估计算法可以对悬架动挠度等状态变量进行估计,从而实现更准确的控制。
在Matlab Simulink软件中,我们可以使用模块化建模方法来搭建非线性悬架和UKF状态估计模型。首先,我们可以使用Simulink中的建模工具来搭建非线性悬架模型。对于模型中的非线性关系,我们可以采用仿真的方法进行验证和调整。接下来,我们可以在Simulink中使用UKF状态估计算法来估计悬架动挠度等状态变量。通过模型的仿真和调整,我们可以实现对悬架系统的精确控制。
在使用非线性悬架和UKF状态估计的过程中,我们还需要注意一些技术细节。例如,悬架系统中可能存在多个状态变量,我们需要对不同的状态变量进行区分和估计。同时,我们还需要注意模型参数的选取和仿真方法的精度。
在本文提供的Matlab Simulink软件中,我们不仅提供了Simulink源码文件,还提供了详细的建模说明文档和对应的参考资料。这些资料可以帮助广大汽车行业从业者更好地了解非线性悬架和UKF状态估计的原理和实现方法,提高汽车的驾驶舒适性和安全性。
综上所述,非线性悬架和UKF状态估计是汽车行业未来的发展趋势。在Matlab Simulink软件中,我们可以使用模块化建模方法来实现对悬架系统的精确控制。本文提供的Simulink源码文件和详细建模说明文档可以帮助广大从业者更好地了解这些技术的原理和实现方法。
相关代码,程序地址:http://lanzouw.top/650052227308.html
















 458
458











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









