






 本文介绍了对A*–Floyd算法进行的改进,包括减少搜索方向、优化障碍物处理、简化路径节点和调整评价函数,以提升路径规划的效率和路径平滑度。在Matlab环境中,用户可灵活定制起点和目标点以及地图。
本文介绍了对A*–Floyd算法进行的改进,包括减少搜索方向、优化障碍物处理、简化路径节点和调整评价函数,以提升路径规划的效率和路径平滑度。在Matlab环境中,用户可灵活定制起点和目标点以及地图。
改进A*--Floyd算法路径规划Matlab
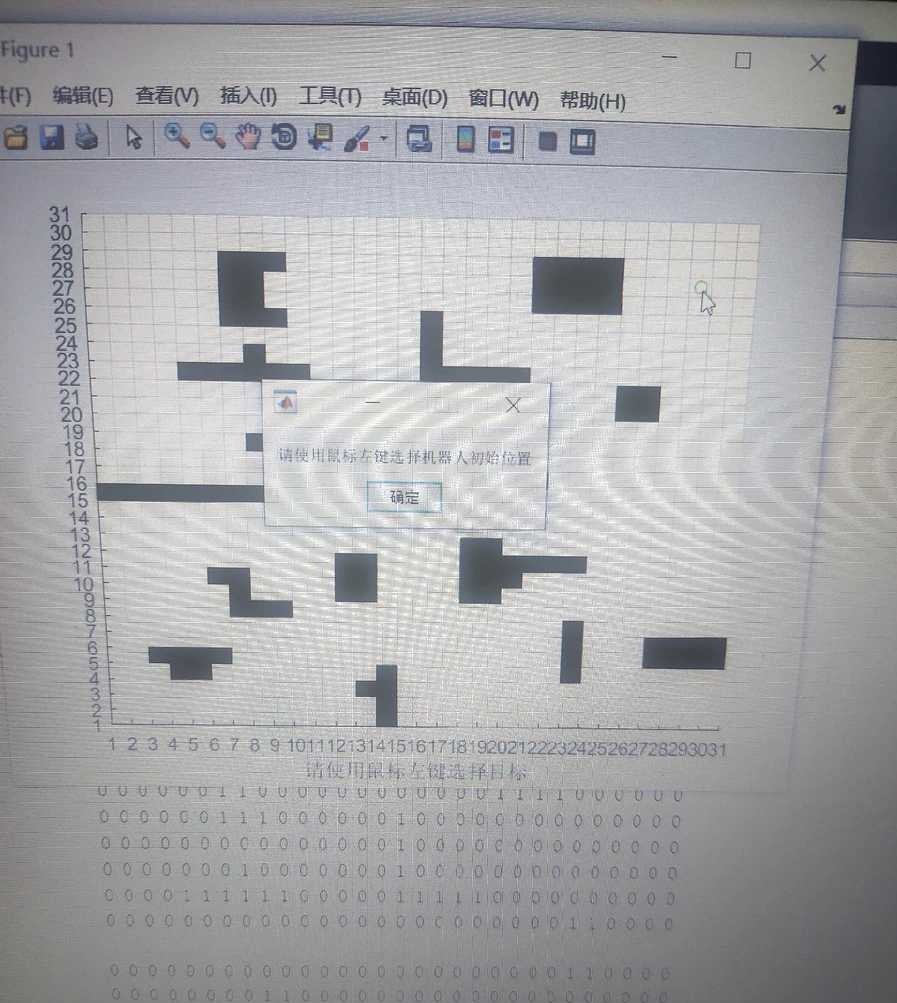
可以自己任意选目标点和起点位置,
地图可自己任意更换
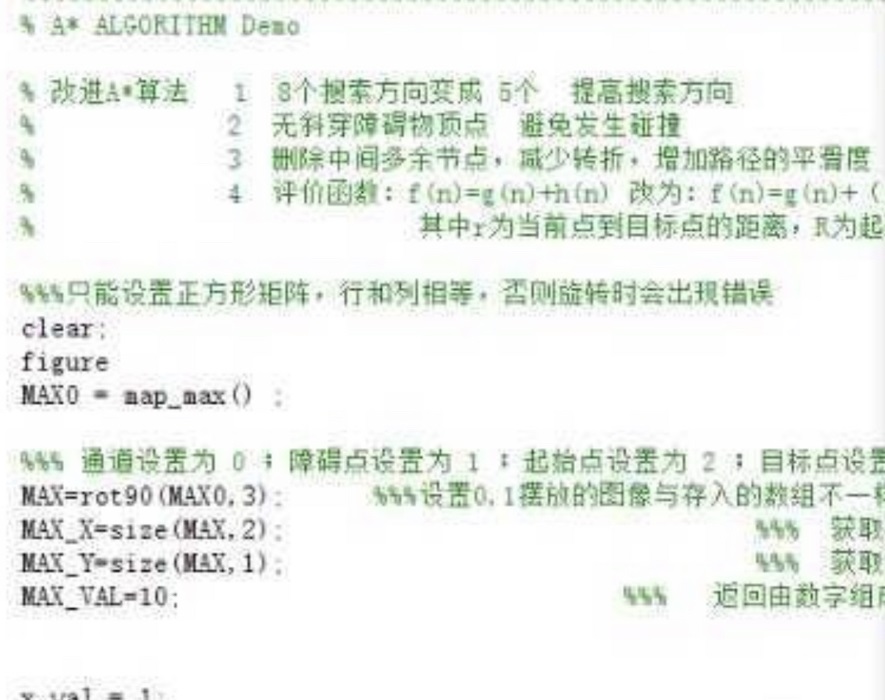
1 8个搜索方向变成 5个 提高搜索方向
2 无斜穿障碍物顶点 避免发生碰撞
3 删除中间多余节点,减少转折,增加路径的平滑度
4 评价函数:f(n)=g(n)+h(n) 改为:f(n)=g(n)+(1+r/R)*h(n)。
可修改地图,起始点,目的地点,黑色为栅格障碍物,灰色为搜索空间的遍历节点
ID:93160669339487913
友善的小光流v
改进A*–Floyd算法路径规划Matlab
摘要:本文对A*–Floyd算法在路径规划中的应用进行了改进。通过对搜索方向、障碍物顶点、路径节点和评价函数进行优化,提高了路径规划的效率和平滑度。在Matlab环境下,我们可以自由选择起点和目标点,并且可以自由更换地图。本文将详细介绍改进的方法,并通过实例来验证其有效性。
1 引言
路径规划是计算机科学中的经典问题之一,它在很多领域都有着广泛的应用,如无人驾驶、机器人导航等。A*–Floyd算法是一种常用的路径规划算法,它通过启发式搜索的方式来寻找最优路径。然而,在实际应用中,A*–Floyd算法仍存在一些问题,如搜索方向、避免碰撞、路径平滑度等方面。本文对这些问题进行了改进,提出了一种优化的路径规划算法。
2 改进方法
2.1 优化搜索方向
原来的A*–Floyd算法中使用的是8个搜索方向,我们将其优化为5个搜索方向。经过实验发现,较少的搜索方向可以减少搜索的时间和计算开销,并且在实际应用中并不会
以上相关代码,程序地址:http://matup.cn/669339487913.html















 873
873











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









