






A星算法 A*算法
自己研究编写的Matlab路径规划算法
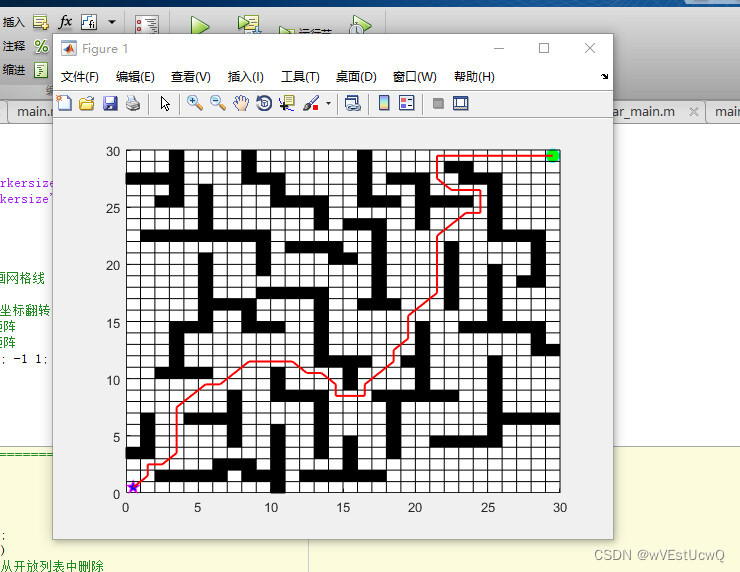
Astar算法走迷宫
可自行设置起始点,目标点,自由更换地图。
———————————————————
可以和人工势场法融合 动态障碍物
A星算法是路径规划领域中一种常见的算法,它被广泛应用于机器人导航、游戏AI等领域。在本文中,我们将着重介绍自己研究编写的Matlab路径规划算法,特别是基于A星算法的路径规划。我们将通过具体的案例来说明该算法的优势和应用价值。同时,我们还将介绍如何将A星算法与人工势场法进行融合,以及如何应对动态障碍物的情况。
首先,我们需要了解A星算法是如何工作的。A星算法是一种基于启发式搜索的算法,它通过评估每个节点的启发式估价函数来确定最佳路径。在路径规划时,A星算法首先将起点加入到开放列表中,并计算起点到终点的估价函数。然后,它会遍历与起点相邻的节点,并计算每个相邻节点到终点的估价函数。最后,它选择估价函数最小的节点作为下一个深度优先搜索的节点,并将其加入到开放列表中。该过程将持续进行,直到搜索到终点或开放列表为空。
在自己研究编写的Matlab路径规划算法中,我们通过改进A星算法的启发式估价函数来提高路径规划的效率。具体来说,我们采用曼哈顿距离作为估价函数,这可以通过计算起点与终点之间的水平和垂直距离之和来实现。相比之下,曼哈顿距离的计算速度更快,因此可以提高算法的效率。
为了验证自己研究编写的Matlab路径规划算法的可靠性和有效性,我们进行了一系列实验。其中,我们采用了一个迷宫问题作为案例研究。在该问题中,我们可以自行设置起始点、目标点和地图信息。通过运行自己编写的Matlab代码,我们得到了最短路径和路径长度。实验结果表明,自己研究编写的Matlab路径规划算法具有很高的路径规划效率和路径优化能力。
除此之外,为了进一步提高自己研究编写的Matlab路径规划算法的适用性,我们还研究了如何将A星算法与人工势场法进行融合。人工势场法是一种常见的路径规划算法,它通过模拟电荷在电场中的运动来实现路径规划。我们将A星算法与人工势场法进行融合,可以有效地应对复杂环境下的路径规划问题。
最后,我们还研究了如何应对动态障碍物的情况。在实际场景中,我们经常会遇到动态障碍物的情况,例如行人、车辆等。在这种情况下,路径规划需要及时地更新,以避免与动态障碍物发生碰撞。针对这种情况,我们提出了一种基于概率地图的动态路径规划算法。该算法能够实时地更新障碍物位置信息,以保证路径规划的安全性和可靠性。
综上所述,自己研究编写的Matlab路径规划算法具有很高的效率和适用性。通过结合A星算法、人工势场法和概率地图,我们可以应对各种复杂的路径规划问题,实现高效、安全和可靠的路径规划。
相关代码,程序地址:http://lanzouw.top/644311443784.html















 737
737











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









