







信息素养更新
screenstart()
点击屏幕开始程序,点击左上角,强制识别正方体,右上角,识别圆锥台,左下角识别圆柱体,右下角,自动识别。
抓取函数mypickup
放到碗里myputInWan
从碗里抓出来放到桶里myputout
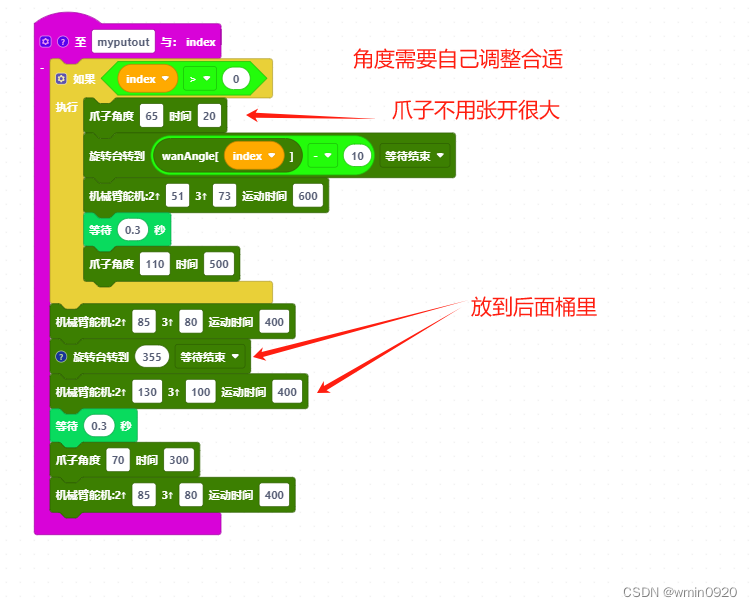
这个函数在左边提出来,修改角度
放到桶里的集合块
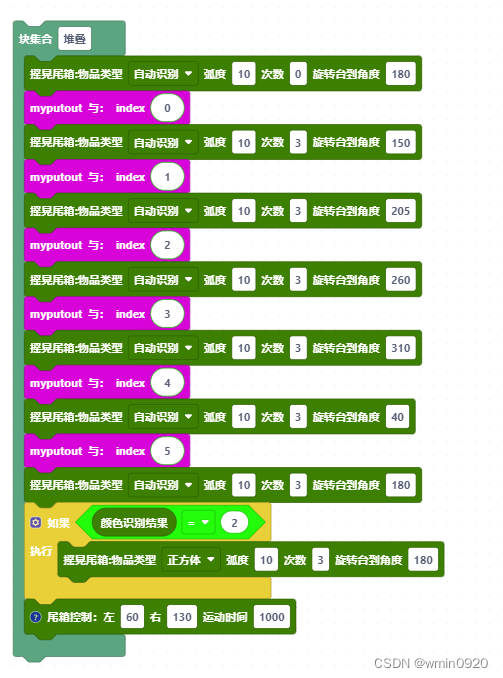
index==0表示手上抓的那个道具。
第一次摇晃0次是因为要让后桶移动到对应的位置,这个函数会自动识别bf.choose,并选择对应的角度
抓取圆锥最后需要切换到正方体的角度,让圆锥充分下落到一堆。
最后张开角度需要自己设置。
注意:一切的正常依赖于自己对角度的设置,
爪子舵机
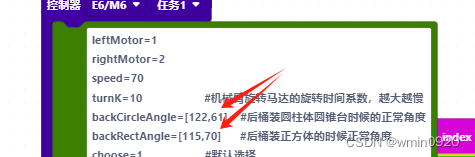
爪子舵机最新程序默认移动到主控器P6(E6),P5(M6)控制。如果还在舵机板上,需要在上面那个白框框中添加一句handbyRCU=False.
爪子舵机为了抓紧,所以角度设置比较大,导致电流比较大。舵机板上的其他路舵机受到影响,就没有足够电流驱动,所以会乱动。因此最终解决方案是将这个舵机移动到主控器控制。剩下的四个舵机分别1234,在servoChannel=[*,1,2,3,4].第一个位置是爪子舵机的,保持不变,值随意。后面的舵机顺序不变。















 1499
1499











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









