









 用例图是系统分析阶段的重要工具,它描绘了系统、参与者及它们之间的交互。本文介绍了用例图的基本元素,包括参与者、用例、关联关系、包含关系、扩展关系和泛化关系,并提供了详细的箭头指向说明。此外,还展示了用例图在系统功能建模中的应用,帮助开发团队理解和沟通系统需求。
用例图是系统分析阶段的重要工具,它描绘了系统、参与者及它们之间的交互。本文介绍了用例图的基本元素,包括参与者、用例、关联关系、包含关系、扩展关系和泛化关系,并提供了详细的箭头指向说明。此外,还展示了用例图在系统功能建模中的应用,帮助开发团队理解和沟通系统需求。
用例图简介:
用例图(英语:use case diagram)是用户与系统交互的最简表示形式,展现了用户和与他相关的用例之间的关系。通过用例图,人们可以获知系统不同种类的用户和用例。用例图也经常和其他图表配合使用。
用例图主要用来描述角色以及角色与用例之间的连接关系。说明的是谁要使用系统,以及他们使用该系统可以做些什么。一个用例图包含了多个模型元素,如系统、参与者和用例,并且显示这些元素之间的各种关系,如泛化、关联和依赖。它展示了一个外部用户能够观察到的系统功能模型图。
【用途】:帮助开发团队以一种可视化的方式理解系统的功能需求。
一、用例图所包含的的元素
- 参与者(Actor)
- 用例(Use Case)
- 关联关系(Association)
- 包含关系(Include)
- 扩展关系(Extend)
- 泛化关系(Generalization)
1.参与者(Actor)——与应用程序或系统进行交互的用户、组织或外部系统。用一个小人表示。

2.用例(Use Case)——用例就是外部可见的系统功能,对系统提供的服务进行描述。用椭圆表示。

3.子系统(Subsystem)——用来展示系统的一部分功能,这部分功能联系紧密。
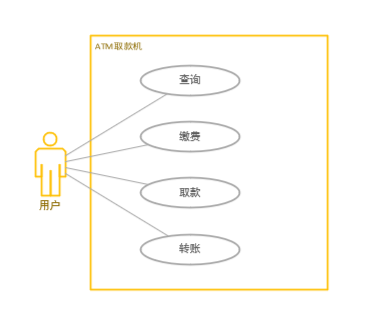
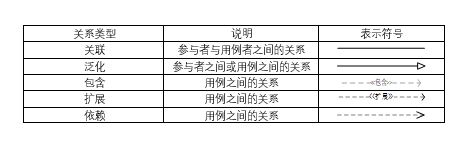
4.关联关系(Association)——表示参与者与用例之间的通信,任何一方都可发送或接受消息。
【箭头指向】:无箭头,将参与者与用例相连接,指向消息接收方。

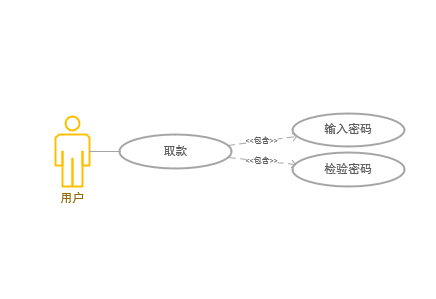
5.包含关系(Include)—— 包含关系用来把一个较复杂用例所表示的功能分解成较小的步骤。
【箭头指向】:指向分解出来的功能用例。
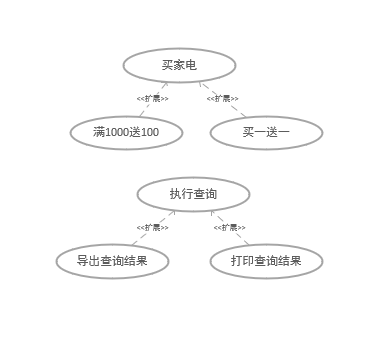
6.扩展关系(Extend)——扩展关系是指用例功能的延伸,相当于为基础用例提供一个附加功能。
【箭头指向】:指向基础用例。
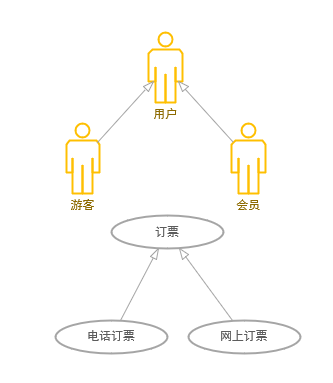
7.泛化关系(Generalization)——就是通常理解的继承关系,子用例和父用例相似,但表现出更特别的行为;子用例将继承父用例的所有结构、行为和关系。
【箭头指向】:指向父用例。
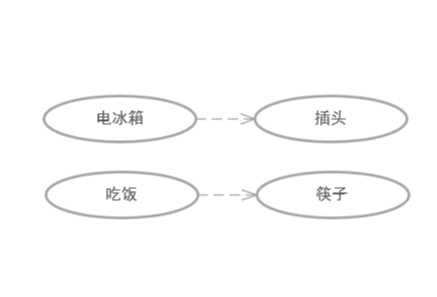
8.依赖关系(Dependency)——以上4种关系,是UML定义的标准关系。但VS2010的用例模型图中,添加了依赖关系,用带箭头的虚线表示,表示源用例依赖于目标用例。
【箭头指向】:指向被依赖项
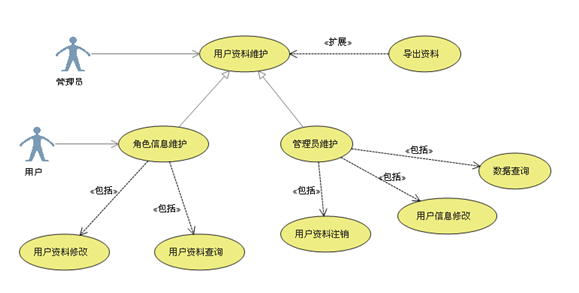
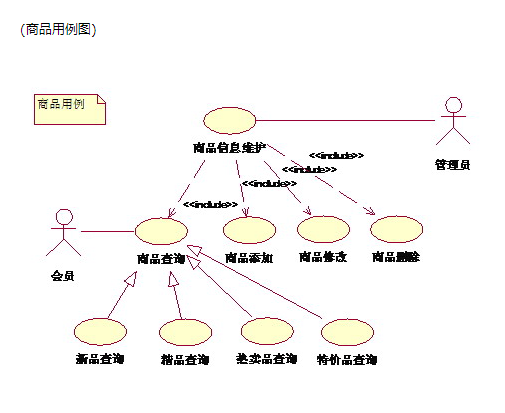
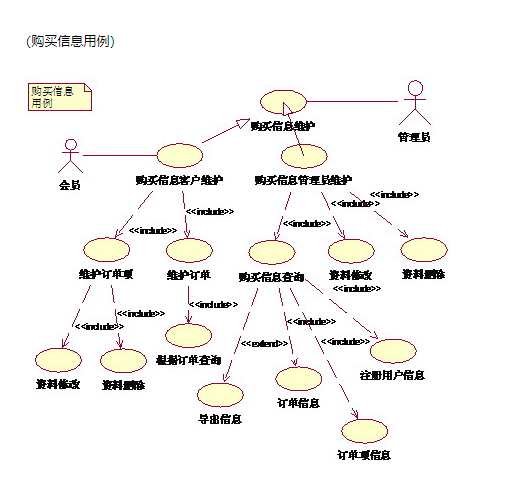
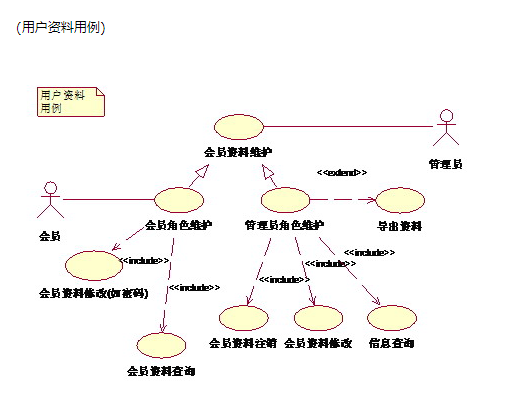
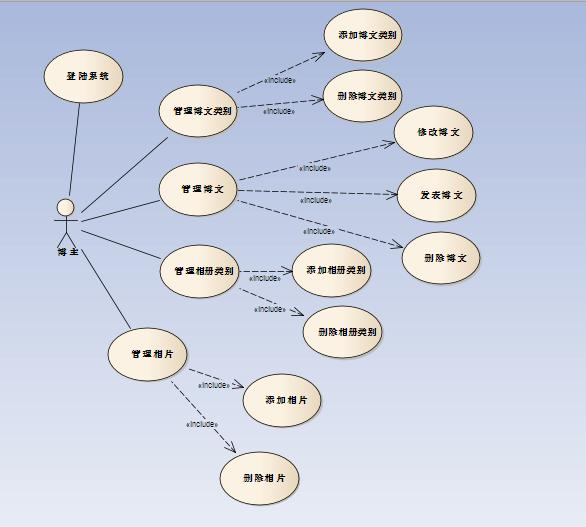
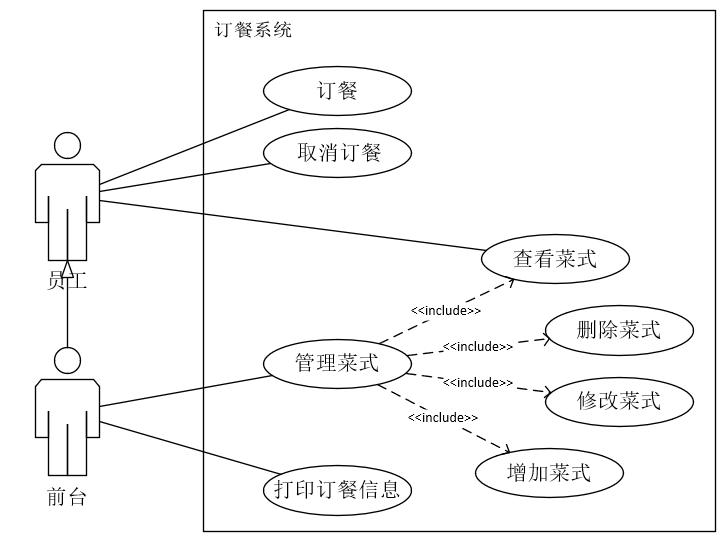
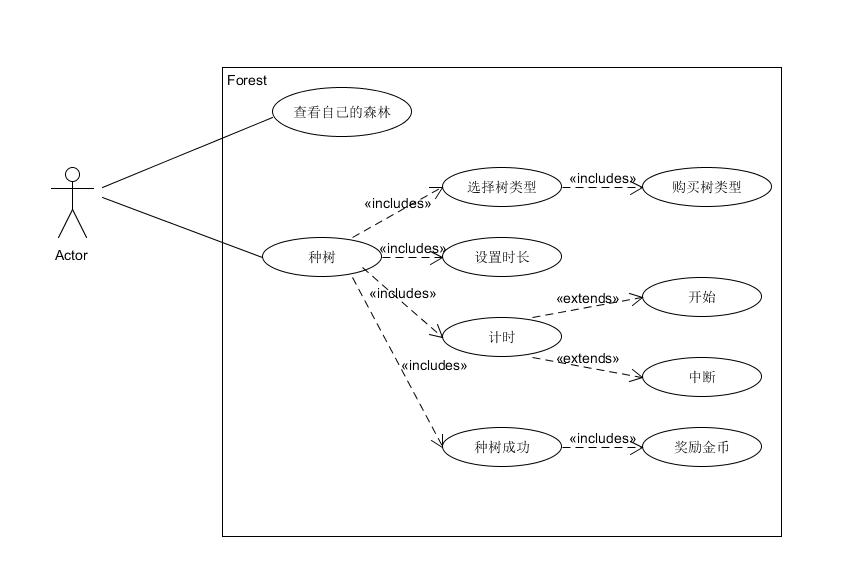
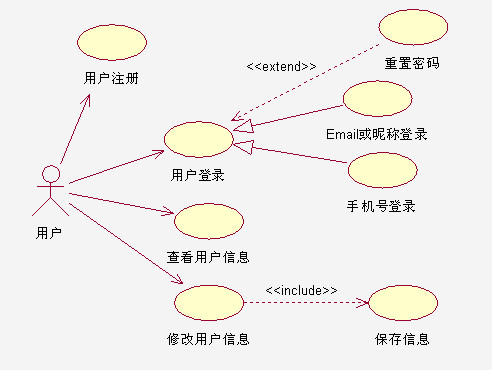
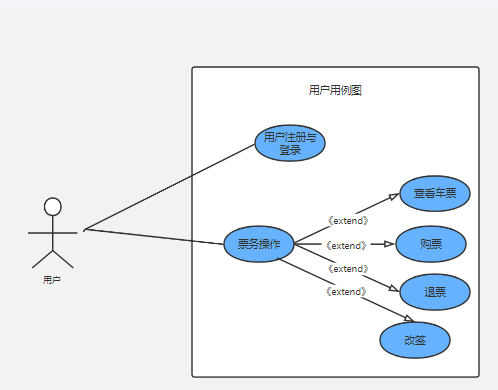
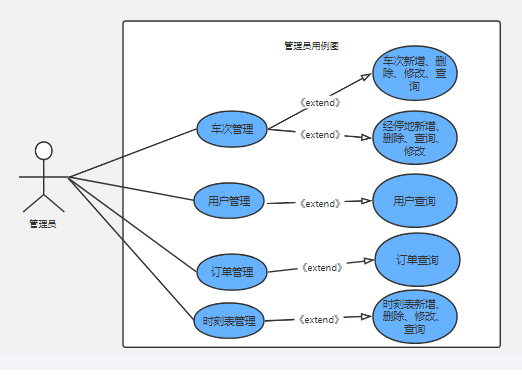
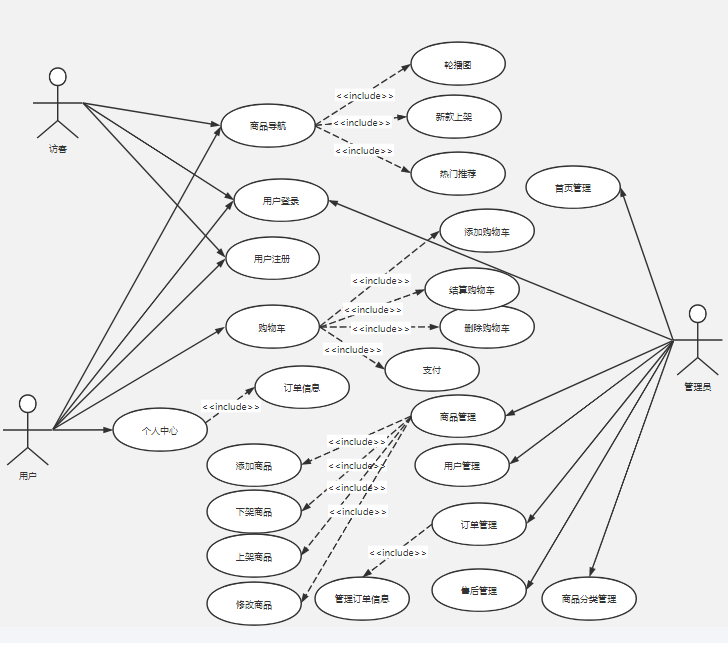
二、几个用例图示例




















 8115
8115

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









