








 本文介绍了多种图像边缘检测算子如Roberts、Prewitt、Sobel及Lapacian算子,并深入探讨了高斯拉普拉斯算子(LoG)与高斯函数差分(DoG)在图像特征提取中的应用。
本文介绍了多种图像边缘检测算子如Roberts、Prewitt、Sobel及Lapacian算子,并深入探讨了高斯拉普拉斯算子(LoG)与高斯函数差分(DoG)在图像特征提取中的应用。
文章目录
在对图像的操作,我们采用模板对原图像进行卷积运算,从而达到我们想要的效果。而获取一幅图像的梯度就转化为:模板(Roberts、Prewitt、Sobel、Lapacian算子)对原图像进行卷积。
一、算子推导过程
知识引入:
在一维连续数集上有函数f(x),我们可以通过求导获得该函数在任一点的斜率,根据导数的定义有:
f
′
(
x
)
=
f
(
x
+
Δ
x
)
−
f
(
x
)
f'(x) = f(x+\Delta x) - f(x)
f′(x)=f(x+Δx)−f(x)
在二维连续数集上有函数f(x,y),我们也可以通过求导获得该函数在x和y分量的偏导数,根据定义有:
∂
f
(
x
,
y
)
∂
x
f
(
x
+
Δ
x
,
y
)
−
f
(
x
,
y
)
\frac{\partial f(x,y)}{\partial x} f(x+\Delta x,y) - f(x,y)
∂x∂f(x,y)f(x+Δx,y)−f(x,y)
∂ f ( x , y ) ∂ y f ( x , y + Δ y ) − f ( x , y ) \frac{\partial f(x,y)}{\partial y} f(x,y+\Delta y) - f(x,y) ∂y∂f(x,y)f(x,y+Δy)−f(x,y)
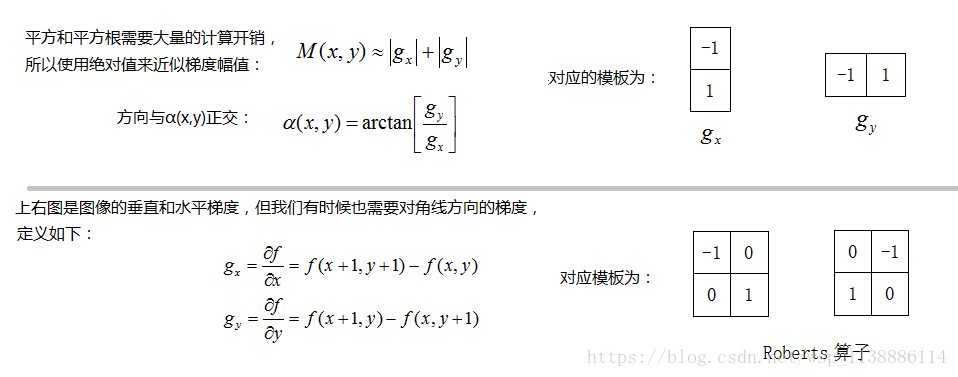
1.1 梯度和Roberts算子:
对于图像来说,是一个二维的离散型数集,通过推广二维连续型求函数偏导的方法,来求得图像的偏导数,即在(x,y)处的最大变化率,也就是这里的梯度:
g
x
=
∂
f
(
x
,
y
)
∂
x
f
(
x
+
1
,
y
)
−
f
(
x
,
y
)
g_x = \frac{\partial f(x,y)}{\partial x} f(x+1,y) - f(x,y)
gx=∂x∂f(x,y)f(x+1,y)−f(x,y)
g
y
=
∂
f
(
x
,
y
)
∂
y
f
(
x
,
y
+
1
)
−
f
(
x
,
y
)
g_y = \frac{\partial f(x,y)}{\partial y} f(x,y+1) - f(x,y)
gy=∂y∂f(x,y)f(x,y+1)−f(x,y)
梯度是一个矢量,则(x,y)处的梯度表示为:
∇
f
≡
g
r
a
d
(
f
)
≡
[
g
x
,
g
y
]
T
=
[
∂
f
∂
x
,
∂
f
∂
y
]
T
∇f \equiv grad(f) \equiv[g_x,g_y]^T = \begin{bmatrix} \frac{\partial f}{\partial x},\frac{\partial f}{\partial y} \end{bmatrix}^T
∇f≡grad(f)≡[gx,gy]T=[∂x∂f,∂y∂f]T
其大小为:
M
(
x
,
y
)
=
m
a
g
(
∇
f
)
=
g
x
2
+
g
y
2
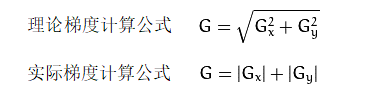
M(x,y) = mag(∇f)=\sqrt{g_x^2+g_y^2}
M(x,y)=mag(∇f)=gx2+gy2
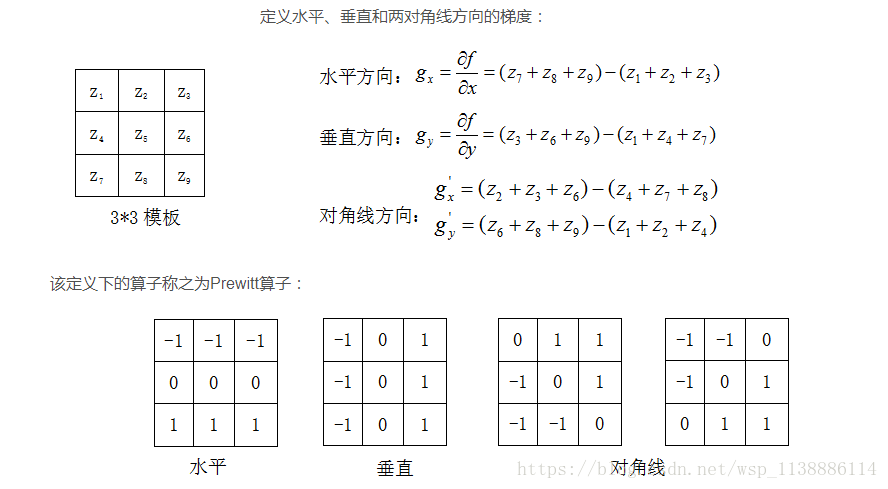
22大小的模板在概念上很简单, 但是他们对于用关于中心点对称的模板来计算边缘方向不是很有用,
其最小模板大小为33。3*3模板考虑了中心点对段数据的性质,并携带有关于边缘方向的更多信息。
1.2 Prewitt:
1.3 Sobel算子
Sobel算子是在Prewitt算子的基础上改进的,在中心系数上使用一个权值2,相比较Prewitt算子,Sobel模板能够较好的抑制(平滑)噪声。
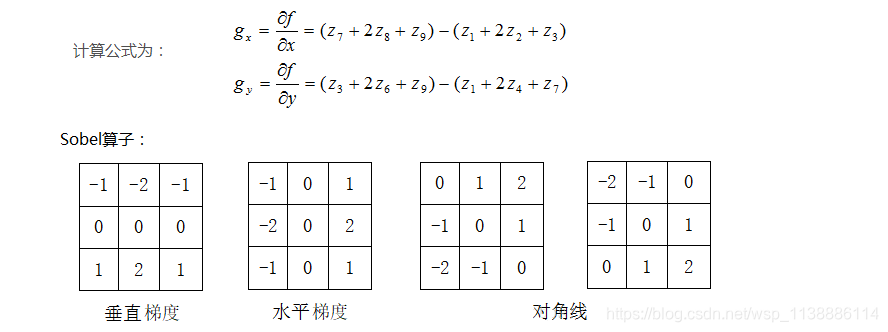
为了工程化,减少计算量使用近似值计算公式,即实际梯度计算公式:
上述所有算子都是通过求一阶导数来计算梯度的,用于线的检测,在图像处理中,通常用于边缘检测。在图像处理过程中,除了检测线,有时候也需要检测特殊点,这就需要用二阶导数进行检测。
1.4 Lapacian算子:
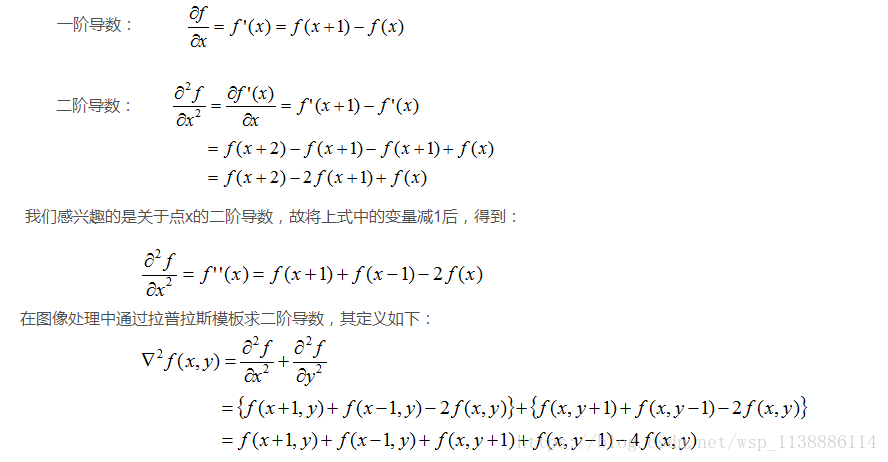
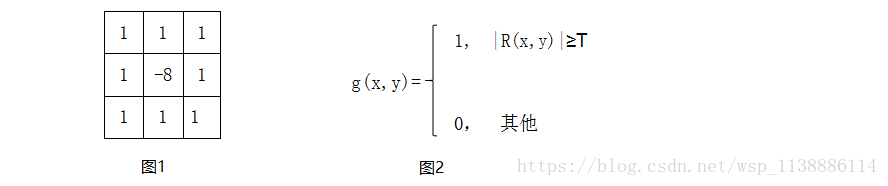
模板中心位置的数字是-8而不是-4,是因为要使这些系数之和为0,当遇到恒定湖对区域时,模板响应应将0。(如下图1)
用lapacian算子图像进行卷积运算时,当响应的绝对值超过指定阈值时,那么该点就是被检测出来的孤立点,具体输出如下: (如下图2)
二、图像特征复杂算子
DoG(Difference of Gaussian)算子和LoG(Laplacian of Gaussian)算子是常用的极值点检测(Blob Detection)两种方法,高斯卷积是为了进行尺度变换。
由于Laplace算子对噪声很敏感,所以一般利用高通滤波器进行平滑处理,所以引入了高斯拉普拉斯算子(LoG,Laplacian of Gaussian)
高斯拉普拉斯算子(LoG,LaplacianofGaussian)对于图像 I(x,y):
- 首先通过尺度为
σ
\sigma
σ 的高斯平滑
G σ ( x , y ) = 1 2 π σ 2 exp ( − x 2 + y 2 2 σ 2 ) G_\sigma (x,y) = \frac{1}{\sqrt{2\pi \sigma^2 }}\exp\left ( -\frac{x^2+y^2}{2 \sigma^2} \right ) Gσ(x,y)=2πσ21exp(−2σ2x2+y2) - 再使用Laplace算子检测边缘:
Δ [ G σ ( x , y ) ∗ I ( x , y ) ] = [ Δ G σ ( x , y ) ] ∗ I ( x , y ) \Delta [G_\sigma (x,y)*I(x,y)] =[ \Delta G_\sigma (x,y)] * I(x,y) Δ[Gσ(x,y)∗I(x,y)]=[ΔGσ(x,y)]∗I(x,y)
证明如下:
d d t 2 [ h ( t ) ∗ f ( t ) ] = d d t ∫ f ( τ ) h ( t − τ ) d τ = ∫ f ( τ ) d d t 2 h ( t − τ ) d τ = f ( t ) ∗ d d t 2 h ( t ) \begin{aligned} \frac{d}{dt^2}[h(t)*f(t)]&=\frac{d}{dt} \int f(\tau )h(t- \tau)d \tau \\ &=\int f(\tau )\frac{d}{dt^2}h(t- \tau)d \tau \\ &=f(t)*\frac{d}{dt^2}h(t) \end{aligned} dt2d[h(t)∗f(t)]=dtd∫f(τ)h(t−τ)dτ=∫f(τ)dt2dh(t−τ)dτ=f(t)∗dt2dh(t) - 总而言之:高斯拉普拉斯算子等价于先对高斯函数求二阶导,再与原图进行卷积。
将高斯拉普拉斯算子展开:
L o G = Δ G σ ( x , y ) = ∂ 2 Δ G σ ( x , y ) ∂ x 2 + ∂ 2 Δ G σ ( x , y ) ∂ y 2 = x 2 + y 2 − 2 ∂ 2 σ 4 exp ( − ( x 2 + y 2 ) 2 σ 2 2 ) \begin{aligned} LoG = \Delta G_\sigma (x,y) &=\frac{\partial^2 \Delta G_\sigma (x,y)}{\partial x^2}+\frac{\partial^2 \Delta G_\sigma (x,y)}{\partial y^2} \\ &=\frac{x^2+y^2-2\partial^2}{\sigma^4}\exp \left ( -\frac{(x^2+y^2)}{2\sigma_2^2} \right ) \end{aligned} LoG=ΔGσ(x,y)=∂x2∂2ΔGσ(x,y)+∂y2∂2ΔGσ(x,y)=σ4x2+y2−2∂2exp(−2σ22(x2+y2))
高斯函数差分(DoG, Difference of Gaussian of Gaussian)
DoG即对不同尺度下的高斯函数的差分,DoG算子表达如下:
D
o
G
=
Δ
G
σ
1
−
Δ
G
σ
2
=
1
2
π
[
1
σ
1
exp
(
−
(
x
2
+
y
2
)
2
σ
1
2
)
−
1
σ
2
exp
(
−
(
x
2
+
y
2
)
2
σ
2
2
)
]
DoG = \Delta G_{\sigma 1}- \Delta G_{\sigma 2} = \frac{1}{\sqrt{2\pi}} \left [ \frac{1}{\sigma_1} \exp \left ( -\frac{(x^2+y^2)}{2\sigma_1^2} \right) - \frac{1}{\sigma_2} \exp \left ( -\frac{(x^2+y^2)}{2\sigma_2^2} \right) \right ]
DoG=ΔGσ1−ΔGσ2=2π1[σ11exp(−2σ12(x2+y2))−σ21exp(−2σ22(x2+y2))]
由于归一化的LoG算子:
L
n
o
r
m
=
σ
2
[
G
x
x
(
x
,
y
,
σ
)
+
G
y
y
(
x
,
y
,
σ
)
]
=
σ
∂
G
∂
σ
L_{\rm norm} = \sigma^2 \left [ G_{xx}(x,y,\sigma ) + G_{yy}(x,y,\sigma ) \right ] = \sigma\frac{\partial G}{\partial \sigma }
Lnorm=σ2[Gxx(x,y,σ)+Gyy(x,y,σ)]=σ∂σ∂G
而:
∂
G
∂
σ
≈
G
(
x
,
y
,
k
σ
)
−
G
(
x
,
y
,
σ
)
k
σ
−
σ
\frac{\partial G}{\partial \sigma } \approx \frac{G(x,y,k\sigma)-G(x,y,\sigma)}{k\sigma-\sigma}
∂σ∂G≈kσ−σG(x,y,kσ)−G(x,y,σ)
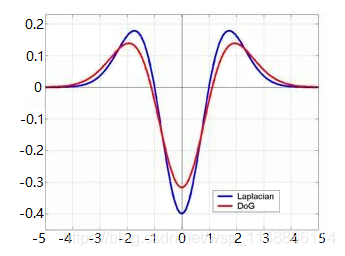
所以: G ( x , y , k σ ) − G ( x , y , σ ) ≈ ( k − 1 ) σ 2 ∇ 2 G \bm {G(x,y,k\sigma)-G(x,y,\sigma) \approx (k-1)\sigma^2 \nabla^2G} G(x,y,kσ)−G(x,y,σ)≈(k−1)σ2∇2G
即DoG算子和LoG算子具有类似的波形,仅仅是幅度不同,不影响极值点的检测,而DoG算子的计算复杂度显然低于LoG,因此一般使用DoG代替LoG算子。


















 6069
6069

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











