









单纯形算法是求解线性规划的经典方法
虽然ta的执行时间在最坏的情况下并不是多项式,然而在实际中这个算法通常是相当快速的
实际上也非常简单,主要就三个步骤:
- 找到一个初始的基本可行解
- 不断的进行旋转(PIVOT)操作
- 重复第二步直到结果不能改进为止
单纯形算法的一个例子
考虑下面这个标准型的线性规划:
最小化:
−x1−14x2−6x3
−
x
1
−
14
x
2
−
6
x
3
满足约束:
x1+x2+x3<=4
x
1
+
x
2
+
x
3
<=
4
x1<=2
x
1
<=
2
x3<=3
x
3
<=
3
3x2+x3<=6
3
x
2
+
x
3
<=
6
x1,x2,x3>=0
x
1
,
x
2
,
x
3
>=
0
为了使用单纯形算法,我们必须将此线性规划转换成松弛型:
min
−x1−14x2−6x3
−
x
1
−
14
x
2
−
6
x
3
s.t.
x1+x2+x3+x4=4
x
1
+
x
2
+
x
3
+
x
4
=
4
x1+x5=2 x 1 + x 5 = 2
x3+x6=3 x 3 + x 6 = 3
3x2+x3+x7=6 3 x 2 + x 3 + x 7 = 6
x1,x2,x3,x4,x5,x6,x7>=0 x 1 , x 2 , x 3 , x 4 , x 5 , x 6 , x 7 >= 0
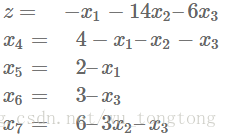
移一下项:
z=−x1−14x2−6x3
z
=
−
x
1
−
14
x
2
−
6
x
3
x4=4−x1−x2−x3 x 4 = 4 − x 1 − x 2 − x 3
x5=2−x1 x 5 = 2 − x 1
x6=3−x3 x 6 = 3 − x 3
x7=6−3x2−x3 x 7 = 6 − 3 x 2 − x 3
x1,x2,x3,x4,x5,x6,x7>=0 x 1 , x 2 , x 3 , x 4 , x 5 , x 6 , x 7 >= 0
在上述的等式的左边称为基本变量,而右边称为非基本变量
单纯形算法的第一步就是构造一个基本解
我们直接用最简单的方法:
把等式右边的非基本变量设为0,计算出左边基本变量的值
容易得到基本解为:
(x1,x2….x7)=(0,0,0,4,2,3,6)
(
x
1
,
x
2
…
.
x
7
)
=
(
0
,
0
,
0
,
4
,
2
,
3
,
6
)
,而目标值z = 0,其实就是把基本变量
xi
x
i
设置为
bi
b
i
一般而言,基本解是可行的,我们称其为基本可行解
初始的基本解不可行的情况见后面的讨论
这里假设初始的基本解就是基本可行解,因此三个步骤中第一步完成了
现在我们就可以开始第二个步骤了:
我们每次选择一个在目标函数中的系数为负的非基本变量
xe
x
e
然后尽可能的增加
xe
x
e
而不违反约束
并将 xe x e 用基本变量 xl x l 表示, 然后把 xe x e 变为基本变量, xl x l 变为非基本变量
这里,假设我们选择增加
x1
x
1
,那么在上述的等式(不包括目标函数
z
z
那行)中,
第个等式限制了
x1<=4
x
1
<=
4
(因为
x4>=0
x
4
>=
0
)
第
2
2
个等式有最严格的限制,它限制了
因此我们最多只能将
x1
x
1
增加到
2
2
根据上面的第二个等式,我们有:,带入上面所有的等式就实现了
xe
x
e
和
xl
x
l
的替换:
z=−2+x5−14x2−6x3 z = − 2 + x 5 − 14 x 2 − 6 x 3
x4=2+x5−x2−x3 x 4 = 2 + x 5 − x 2 − x 3
x1=2−x5 x 1 = 2 − x 5
x6=3−x3 x 6 = 3 − x 3
x7=6−3x2−x3 x 7 = 6 − 3 x 2 − x 3
x1,x2,x3,x4,x5,x6,x7>=0 x 1 , x 2 , x 3 , x 4 , x 5 , x 6 , x 7 >= 0
实际上这就是一个转动的过程,一次转动选取一个非基本变量(也叫替入变量)
xe
x
e
和一个基本变量(也叫替出变量)
xl
x
l
,然后替换二者的角色
执行一次转动的过程与之前所描述的线性规划是等价的
同样的,我们将非基本变量设为0,于是得到:
(x1,x2,...,x7)=(2,0,0,2,0,3,6),z=−2
(
x
1
,
x
2
,
.
.
.
,
x
7
)
=
(
2
,
0
,
0
,
2
,
0
,
3
,
6
)
,
z
=
−
2
说明我们的目标减少了
−2
−
2
接下来是单纯形算法的第三步,就是不断地进行转动,直到无法进行改进为止,那我们就继续进行刚才的例子:
我们接着再执行一个转动,这次我们可以选择增大
x2
x
2
或
x3
x
3
,
但是我们不能选择
x5
x
5
,因为增大
x5
x
5
之后
z
z
也增大,而我们要求最小化
那我们就选择
x2
x
2
吧:
从条件中可以看出,
x2
x
2
最多能够增加到2
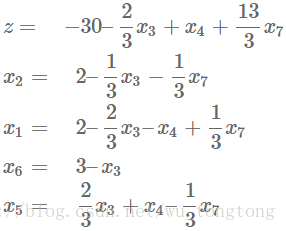
z=−30+8x3+14x4−13x5 z = − 30 + 8 x 3 + 14 x 4 − 13 x 5
x2=2+x5−x4−x3 x 2 = 2 + x 5 − x 4 − x 3
x1=2−x5 x 1 = 2 − x 5
x6=3−x3 x 6 = 3 − x 3
x7=2x3+3x4−3x5 x 7 = 2 x 3 + 3 x 4 − 3 x 5
此时,我们的基本解变为 (x1,x2….x7)=(2,2,0,0,0,3,0),z=−30 ( x 1 , x 2 … . x 7 ) = ( 2 , 2 , 0 , 0 , 0 , 3 , 0 ) , z = − 30
我们可以继续的选择增大 x5 x 5 (只能选择系数是负的),第4个等式具有最严格的限制( 0–3x5>=0 0 – 3 x 5 >= 0 ),我们有 x5=2/3∗x3+x4–1/3∗x7 x 5 = 2 / 3 ∗ x 3 + x 4 – 1 / 3 ∗ x 7
此时,我们的基本解变为
(x1,x2….x7)=(2,2,0,0,0,3,0),z=−30
(
x
1
,
x
2
…
.
x
7
)
=
(
2
,
2
,
0
,
0
,
0
,
3
,
0
)
,
z
=
−
30
,这时候并没有增加
但是这并不是最大值,我们还要继续旋转
这一次我们选择增加
x3
x
3
第2个和第3个有最严格的限制,我们选第2个的话,得:
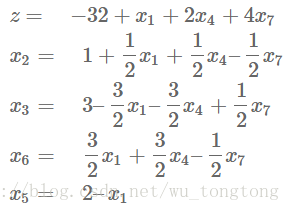
x3=3–3/2∗x1–3/2∗x4+1/2∗x7
x
3
=
3
–
3
/
2
∗
x
1
–
3
/
2
∗
x
4
+
1
/
2
∗
x
7
现在我们好像已经没有可以旋转的值了,算法停止
z=−32
z
=
−
32
就是我们的解
而此时,基本解为:
(x1,x2….x7)=(0,1,3,0,2,0,0)
(
x
1
,
x
2
…
.
x
7
)
=
(
0
,
1
,
3
,
0
,
2
,
0
,
0
)
,看看最开始的目标函数:
z=−x1−14x2–6x3
z
=
−
x
1
−
14
x
2
–
6
x
3
我们将
x2=1,x3=3
x
2
=
1
,
x
3
=
3
带入得,
z=−32
z
=
−
32
,说明我们经过一系列的旋转后,得到了目标值
退化
在刚才的例子中,有两次旋转的目标值是一样的,这种现象称为退化
退化可能会导致循环(cycling)的情况,这是使得单纯形算法不会终止的唯一原因
还好上面的例子中,我们没有产生循环的情况,再次旋转,目标值继续降低
如何避免退化?一个方法就是使用 Bland B l a n d 规则:
在选择替入变量和替出变量的时候,我们总是选择满足条件的下标最小值
替入变量
xe
x
e
:目标条件中,系数为负数的第一个作为替入变量
替出变量
xl
x
l
:对所有的约束条件中,选择对
xe
x
e
约束最紧的第一个
在上面的例子中,我们就是这么做的
(另一个方法是加入随机扰动)
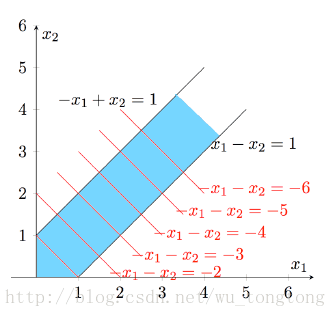
无界(unbounded)情况

最小化:
−x1−x2
−
x
1
−
x
2
约束条件:
x1−x2<=1
x
1
−
x
2
<=
1
−x1+x2<=1
−
x
1
+
x
2
<=
1
x1,x2>=0
x
1
,
x
2
>=
0
那这个例子用松弛型怎么表示呢?
z=−x1−x2
z
=
−
x
1
−
x
2
x1−x2+x3=1
x
1
−
x
2
+
x
3
=
1
−x1+x2+x4=1
−
x
1
+
x
2
+
x
4
=
1
x1,x2>=0
x
1
,
x
2
>=
0
z=−x1−x2
z
=
−
x
1
−
x
2
x3=1−x1+x2
x
3
=
1
−
x
1
+
x
2
x4=1+x1−x2
x
4
=
1
+
x
1
−
x
2
x1,x2,x3,x4>=0
x
1
,
x
2
,
x
3
,
x
4
>=
0
选取替入变量
x1
x
1
z=−1−2x2+x3
z
=
−
1
−
2
x
2
+
x
3
x1=1+x2−x3
x
1
=
1
+
x
2
−
x
3
x4=2−x3
x
4
=
2
−
x
3
x1,x2,x3,x4>=0
x
1
,
x
2
,
x
3
,
x
4
>=
0
这时候我们只能选择
x2
x
2
为替入变量,才能使得目标值变小,
但是我们发现,对于
x2
x
2
没有任何的约束,也就是说,
x2
x
2
可以无限大,所以这是没有边界的情况
这个情况是我们有一个替入变量,但是找不到一个替出变量导致的,
这时候就是无界的情况了,写算法的时候注意判断一下即可
具体实现
我们回到一开始的例子:
min
z=−x1−14x2−6x3
z
=
−
x
1
−
14
x
2
−
6
x
3
s.t.
x1+x2+x3+x4=4
x
1
+
x
2
+
x
3
+
x
4
=
4
x1+x5=2 x 1 + x 5 = 2
x3+x6=3 x 3 + x 6 = 3
3x2+x3+x7=6 3 x 2 + x 3 + x 7 = 6
x1,x2,x3,x4,x5,x6,x7>=0 x 1 , x 2 , x 3 , x 4 , x 5 , x 6 , x 7 >= 0
我们得到下面的矩阵:
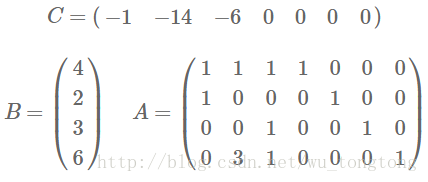
- 矩阵A:约束条件的系数(等号左边的系数)
- 矩阵B:约束条件的值(等号右边)
- 矩阵C:目标函数的系数值
我们将ta们拼接起来:
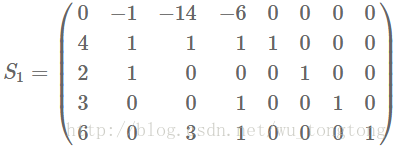
可以注意到最左上角多出来一个0,那是什么呢?
这个是 −z − z ,初始时 −z=0 − z = 0
将上面那个矩阵和写成基本变量 = 非基本变量的形式对比:
可以发现,非基本变量符号都与原先的相反,基本变量符号相同
接着以进行第二步吧,
来看看我们的矩阵是如何进行运算的,第二步我们的结果如下(我们选择了
x1
x
1
为替入变量,
x5
x
5
为替出变量):
z=−2−14x2−6x3+x5
z
=
−
2
−
14
x
2
−
6
x
3
+
x
5
x4=2−x2−x3+x5
x
4
=
2
−
x
2
−
x
3
+
x
5
x1=2−x5
x
1
=
2
−
x
5
x6=3−x3
x
6
=
3
−
x
3
x7=6−3x2−x3
x
7
=
6
−
3
x
2
−
x
3
我们选择的式子是x第二个
首先看看约束条件的式子,
x1=2–x5
x
1
=
2
–
x
5
我们改写成:
2=x1+x5
2
=
x
1
+
x
5
因此第二个式子对应的矩阵就是:
(2,1,0,0,0,1,0,0)
(
2
,
1
,
0
,
0
,
0
,
1
,
0
,
0
)
其它的类推,注意-z,因此我们的矩阵应该是如下形式的:
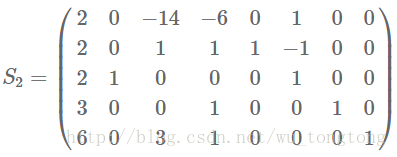
那么 S1 S 1 是怎么变成 S2 S 2 的呢?
首先是第2行,我们是将
x1
x
1
用
x5
x
5
表示
(x1=x5)
(
x
1
=
x
5
)
在等式的变换中,就是移项,然后每一个都除以
x1
x
1
的系数
其实用矩阵很简单,这里就是mat[2] /= mat[2][1] ,表示矩阵第二行都除以第二行第一个元素
其它行呢?
只要有
x1
x
1
的,我们都用
x1=2–x5
x
1
=
2
–
x
5
来表示,
就是减去该行
x1
x
1
的系数
∗mat[2]
∗
m
a
t
[
2
]
mat[i]=mat[i]–mat[2]∗mat[i][1]
m
a
t
[
i
]
=
m
a
t
[
i
]
–
m
a
t
[
2
]
∗
m
a
t
[
i
]
[
1
]
这样就实现了约束条件中替入和替出变量的替换
对于目标函数
将
x1
x
1
用
2–x5
2
–
x
5
来表示,参照上面的思路,同样的减法:
mat[0]=mat[0]–mat[2]∗(C中x1的系数)=mat[0]+mat[2]
m
a
t
[
0
]
=
m
a
t
[
0
]
–
m
a
t
[
2
]
∗
(
C
中
x
1
的
系
数
)
=
m
a
t
[
0
]
+
m
a
t
[
2
]
注意到其实我们的
z=−2
z
=
−
2
,而左上角的为
2
2
,也就是,这就是我们为啥说左上角是
−z
−
z
的原因
简单总结一下:
- 首先我们从目标函数中找到一个系数不为0的变量,确定ta为替入变量 e e
- 在所有的约束条件中,找到最苛刻的约束条件
- 修改矩阵
- 当前行(变量系数和常数):该行除以
e
e
的系数
- 其他行(变量系数和常数):该行减去该行
e
e
的系数行
A[i][j]=A[i][j]−A[i][e]∗A[l][j],A[i][e]=−A[i][e]∗A[l][e] A [ i ] [ j ] = A [ i ] [ j ] − A [ i ] [ e ] ∗ A [ l ] [ j ] , A [ i ] [ e ] = − A [ i ] [ e ] ∗ A [ l ] [ e ] - 目标函数:该行减去
C
C
中 的系数
∗l
∗
l
行
C[i]=C[i]−C[e]∗A[l][i],C[e]=−C[e]∗A[l][e] C [ i ] = C [ i ] − C [ e ] ∗ A [ l ] [ i ] , C [ e ] = − C [ e ] ∗ A [ l ] [ e ]
- 当前行(变量系数和常数):该行除以
e
e
的系数
初始解 ≠ 基本可行解||无解
我们在一开始例子引入的时候,我们有一个很重要的前提:
初始解是基本可行解
但是有例外,怎么破?
先来个例子(例一):
min:
x1+2x2
x
1
+
2
x
2
s.t.:
x1+x2<=2
x
1
+
x
2
<=
2
x1+x2>=1
x
1
+
x
2
>=
1
x1,x2>=0
x
1
,
x
2
>=
0
min:
x1+2x2
x
1
+
2
x
2
s.t.:
x1+x2<=2
x
1
+
x
2
<=
2
−x1−x2<=−1
−
x
1
−
x
2
<=
−
1
x1,x2>=0
x
1
,
x
2
>=
0
z=x1+2x2
z
=
x
1
+
2
x
2
x1+x2+x3=2
x
1
+
x
2
+
x
3
=
2
−x1−x2+x4=−1
−
x
1
−
x
2
+
x
4
=
−
1
x1,x2,x3,x4>=0
x
1
,
x
2
,
x
3
,
x
4
>=
0
z=x1+2x2
z
=
x
1
+
2
x
2
x3=2−x1−x2
x
3
=
2
−
x
1
−
x
2
x4=−1+x1+x2
x
4
=
−
1
+
x
1
+
x
2
x1,x2,x3,x4>=0
x
1
,
x
2
,
x
3
,
x
4
>=
0
我们像之前一样得到一个初始解:
(x1,x2,x3,x4)=(0,0,2,−1)
(
x
1
,
x
2
,
x
3
,
x
4
)
=
(
0
,
0
,
2
,
−
1
)
但是
x4=−1
x
4
=
−
1
是不满足条件的,即初始解不是基本可行解
那么再来一个例子(例二):
min:
x1+2x2
x
1
+
2
x
2
s.t.:
x1+x2>=2
x
1
+
x
2
>=
2
x1+x2<=1
x
1
+
x
2
<=
1
x1,x2>=0
x
1
,
x
2
>=
0
从前两个式子就可以看出来,这个线性规划是无解的
我们来看看初始解的情况:
z=x1+2x2
z
=
x
1
+
2
x
2
x3=−2+x1+x2
x
3
=
−
2
+
x
1
+
x
2
x4=1−x1−x2
x
4
=
1
−
x
1
−
x
2
x1,x2,x3,x4>=0
x
1
,
x
2
,
x
3
,
x
4
>=
0
有: (x1,x2,x3,x4)=(0,0,−2,1) ( x 1 , x 2 , x 3 , x 4 ) = ( 0 , 0 , − 2 , 1 ) ,但是 x3=−2 x 3 = − 2 是不满足条件的,即初始解不是基本可行解
最大值<=>最小值
之前我们的不等式都是这个形式:
x1+x2<=z
x
1
+
x
2
<=
z
,求解目标函数的最大值
但是如果我们遇到
x1+x2>=z
x
1
+
x
2
>=
z
,求解目标函数的最小值,这要怎么办呢
这种情况下,我们就需要一个很厉害的定理:对偶定理
简单来说,就是:
如果原线性规划的目标函数是最大值,我们可以通过转化,使其变成求取最小值的目标函数
两个线性规划的目标函数最优值相等
如果目标函数的系数构成的矩阵为
C
C
——它是一个行向量
约束条件的常数构成的矩阵为——它是一个列向量
约束条件中所有的系数构成的矩阵为
A
A
那么我们把的
I,J
I
,
J
转置,再把
B
B
和交换,把求最大值变成求最小值(或把求最小值变成求最大值)
就得到了一个新的线性规划
ta和原来的线性规划的基变量个数可能是不同的,但最优解是相同的
举个例子,
对于线性规划:
Maximize−Cx(S.T.Ax<=B,x>=0)
M
a
x
i
m
i
z
e
−
C
x
(
S
.
T
.
A
x
<=
B
,
x
>=
0
)
我们可以把它转化成等价的线性规划:
Minmize−BTx(S.T.ATy<=CT,y>=0)
M
i
n
m
i
z
e
−
B
T
x
(
S
.
T
.
A
T
y
<=
C
T
,
y
>=
0
)
SEE THE CODE
//最大值
#include<cstdio>
#include<cstring>
#include<iostream>
using namespace std;
const double eps=1e-7;
const double INF=1e10;
int n,m;
double a[10003][1003],b[10003],c[10010],ans,v;
//a:约束条件的系数
//b:约束条件的常数
//c:目标函数的系数
void priov(int l,int e)
{
b[l]/=a[l][e];
for (int i=1;i<=m;i++) //l行中的每一元素都除以e的系数
if (i!=e) a[l][i]/=a[l][e];
a[l][e]=1/a[l][e];
for (int i=1;i<=n;i++)
if (i!=l&&fabs(a[i][e])>eps) //有e这个变量的行
{
b[i]-=b[l]*a[i][e];
for (int j=1;j<=m;j++)
if (j!=e) a[i][j]-=a[l][j]*a[i][e];
a[i][e]=-a[i][e]*a[l][e];
}
v+=c[e]*b[l];
for (int i=1;i<=m;i++)
if (i!=e) c[i]-=c[e]*a[l][i];
c[e]=-c[e]*a[l][e];
}
double simple()
{
int l,i,e;
double t;
v=0.0;
while (1)
{
for (i=1;i<=m;i++)
if (c[i]>eps) break;
e=i; //系数不为零的一项 替入变量
if (e==m+1) return v;
t=INF;
for (i=1;i<=n;i++)
if ((a[i][e]>eps)&&(t>b[i]/a[i][e]))
t=b[i]/a[i][e],l=i;
if (t==INF) return INF; //无界状态
priov(l,e); //l 替入变量限制最紧的一行
}
}
int main()
{
scanf("%d%d",&m,&n);
for (int i=1;i<=m;i++)
scanf("%lf",&c[i]);
for (int i=1;i<=n;i++)
{
int l,r;
scanf("%d%d%lf",&l,&r,&b[i]);
for (int j=l;j<=r;j++)
a[i][j]++;
}
ans=simple();
printf("%.0lf",ans);
return 0;
} 













 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









