







前言
k-means算法是数据挖掘十大经典算法之一,已出现了很多的改进或改良算法。例如
- 1、对k的选择可以先用一些算法,分析数据的分布,如重心和密度等,然后选择合适的k。
- 2、有人提出了二分k均值(bisecting k-means)算法,它对初始的k个质心的选择就不太敏感。
- 3、基于图划分的谱聚类算法,能够很好地解决非凸数据的聚类。
一、Canopy算法配合初始聚类
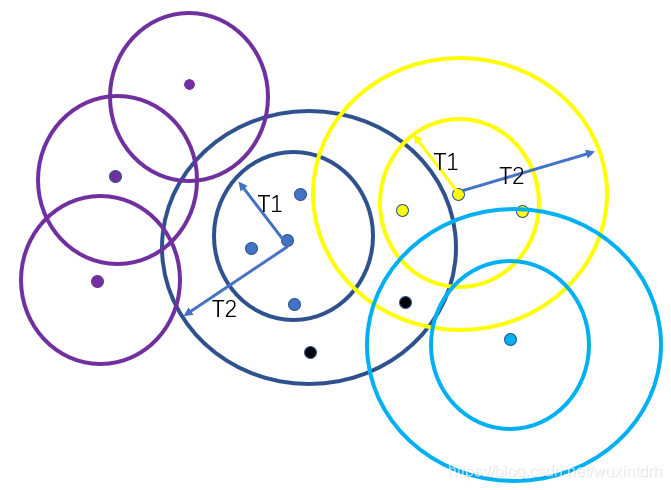
1.1、算法原理
- 选择质心,T1圆内的点归为本簇,T1到T2范围内的点属于可疑点(黑色的点), T2外的点为簇外点(绿色的点)
- 从簇外点中选择质心,然后根据T1,T2划分
- T1范围内的可疑点,划到本簇,
- 直到所有的簇外点划分完成
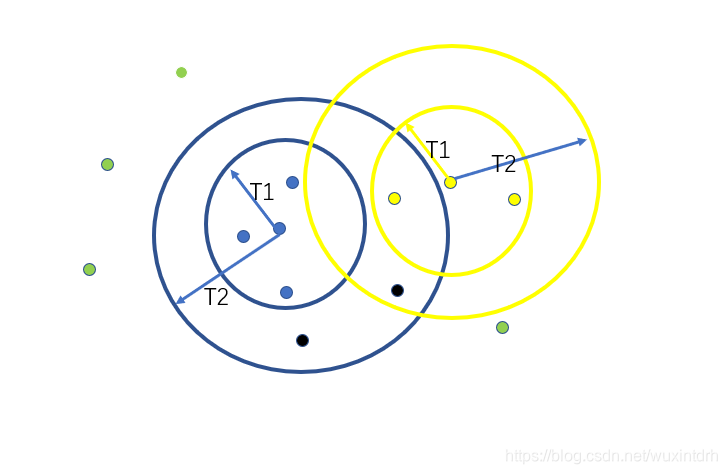
划分完成, 对于较小的簇将其去掉, 此时的K值可以作为K-means的初始K值
1.2、Canopy的优缺点
1.2.1、优点
- 1、 Kmeans对噪声抗干扰较弱,通过Canopy 对比,将较小的NumPoint的Cluster直接去掉有利于抗干扰。
- 2、Canopy选择出来的每个Canopy的centerPoint作为K会更精确。
- 3、只是针对每个Canopy的内做Kmeans聚类, 减少相似计算的数量。
1.2.2、缺点(问题)
这和需要设置初始条件的算法都有的通病,就是初始条件的选取
算法中 T1、T2的确定问题
二、K-means++
P = D ( x ) 2 ∑ x ∈ X D ( x ) 2 P= \frac{D(x)^2}{\sum_{x \in X}D(x)^2} P=∑x∈XD(x)2D(x)2
参考:https://www.cnblogs.com/wang2825/articles/8696830.html
其实这个算法也只是对初始点的选择有改进而已,其他步骤都一样。初始质心选取的基本思路就是,初始的聚类中心之间的相互距离要尽可能的远。
算法描述如下:
-
步骤一:随机选取一个样本作为第一个聚类中心 c1;
-
步骤二:
- 计算每个样本与当前已有类聚中心最短距离(即与最近一个聚类中心的距离),用
D(x)表示;这个值越大,表示被选取作为聚类中心的概率较大; - 最后,用轮盘法选出下一个聚类中心;
- 计算每个样本与当前已有类聚中心最短距离(即与最近一个聚类中心的距离),用
-
步骤三:重复步骤二,知道选出 k 个聚类中心。
-
选出初始点后,就继续使用标准的 k-means 算法了
三、二分K-means
3.1、算法思路
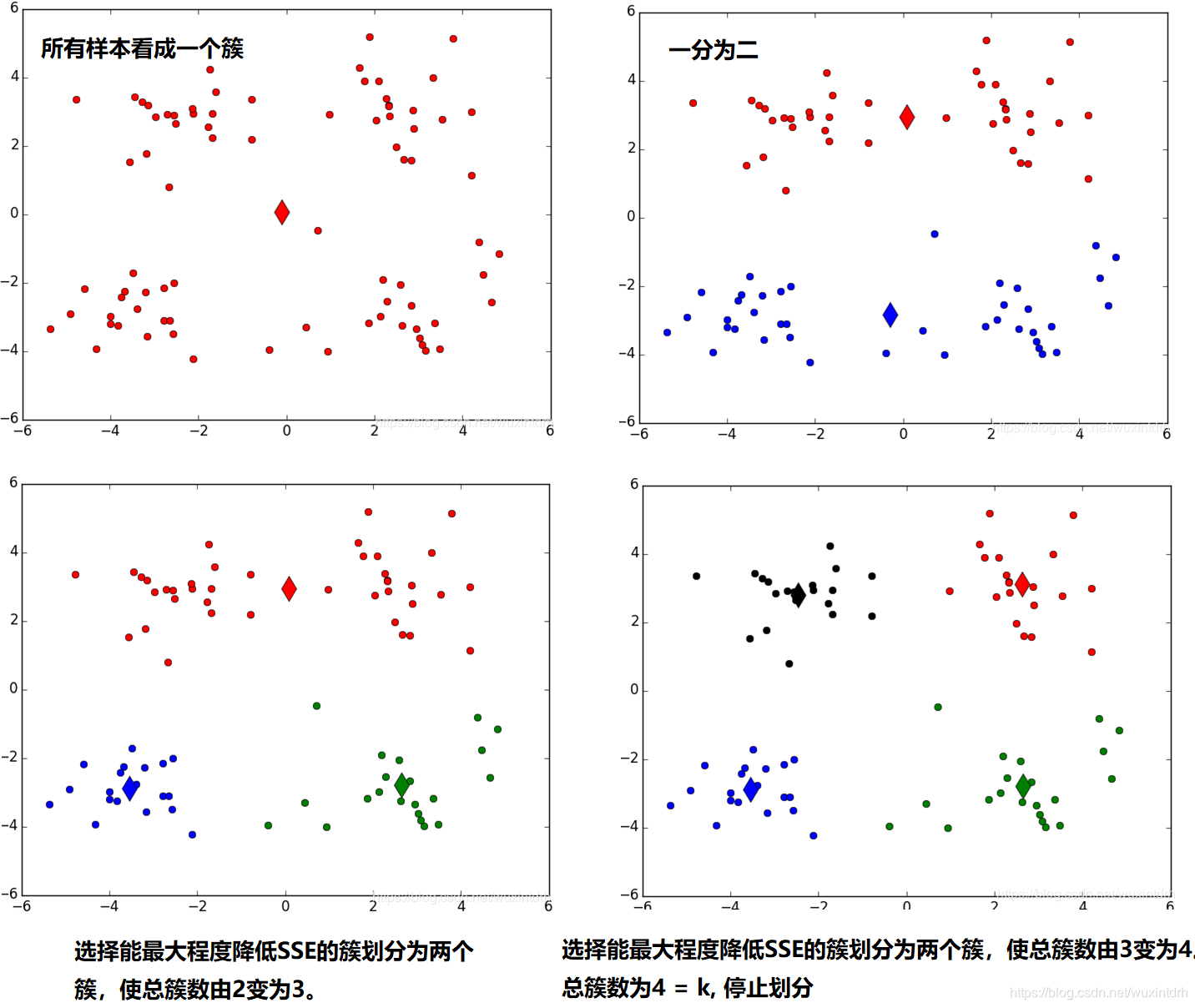
- 所有点作为一个簇
- 将该簇一分为二
- 选择能最大限度降低聚类代价函数(也就是误差平方和SSE)的簇 划分为两个簇。
- 以此进行下去,直到簇的数目等于用户给定的数目k为止。
3.2、算法实现
#二分kmeans
def biKmeans(dataSet, k, distMeas=distEclud):
m = shape(dataSet)[0]
clusterAssment = mat(zeros((m,2)))
#所有样本看成一个簇,求均值
centroid0 = mean(dataSet, axis=0).tolist()[0]#axis=0按列,matrix->list
centList =[centroid0] #create a list with one centroid
for j in range(m): #计算初始总误差SSE
clusterAssment[j,1] = distMeas(mat(centroid0), dataSet[j,:])**2
#当簇数<k时
while (len(centList) < k):
lowestSSE = inf #初始化SSE
#对每个簇
for i in range(len(centList)):
#获取当前簇cluster=i内的数据
ptsInCurrCluster = dataSet[nonzero(clusterAssment[:,0].A==i)[0],:]
#对cluster=i的簇进行kmeans划分,k=2
centroidMat, splitClustAss = kMeans(ptsInCurrCluster, 2, distMeas)
#cluster=i的簇被划分为两个子簇后的SSE
sseSplit = sum(splitClustAss[:,1])
#除了cluster=i的簇,其他簇的SSE
sseNotSplit = sum(clusterAssment[nonzero(clusterAssment[:,0].A!=i)[0],1])
print("sseSplit, and notSplit: ",sseSplit,sseNotSplit)
#找最佳的划分簇,使得划分后 总SSE=sseSplit + sseNotSplit最小
if (sseSplit + sseNotSplit) < lowestSSE:
bestCentToSplit = i
bestNewCents = centroidMat #被划分簇的两个新中心
bestClustAss = splitClustAss.copy() #被划分簇的聚类结果0,1 ,及簇内SSE
lowestSSE = sseSplit + sseNotSplit
#将最佳被划分簇的聚类结果为1的类别,更换类别为len(centList)
bestClustAss[nonzero(bestClustAss[:,0].A == 1)[0],0] = len(centList)
#将最佳被划分簇的聚类结果为0的类别,更换类别为bestCentToSplit
bestClustAss[nonzero(bestClustAss[:,0].A == 0)[0],0] = bestCentToSplit
print('the bestCentToSplit is: ',bestCentToSplit)
print('the len of bestClustAss is: ', len(bestClustAss))
#将被划分簇的一个中心,替换为划分后的两个中心
centList[bestCentToSplit] = bestNewCents[0,:].tolist()[0]
centList.append(bestNewCents[1,:].tolist()[0])
#更新整体的聚类效果clusterAssment(类别,SSE)
clusterAssment[nonzero(clusterAssment[:,0].A == bestCentToSplit)[0],:]= bestClustAss
#kMeans.datashow(dataSet,len(centList),mat(centlist),clusterAssment)
return mat(centList), clusterAssment四、Kernel k-means
线性可分与线性不可分, 通过核函数将数据提升到高维,是的在低维线性不可分的数据,变成高维的线性可分。
4.1、通过映射关系,将数据映射到高维空间,然后在高维可以线性可用
注意:核函数是用来计算 映射后的内积,
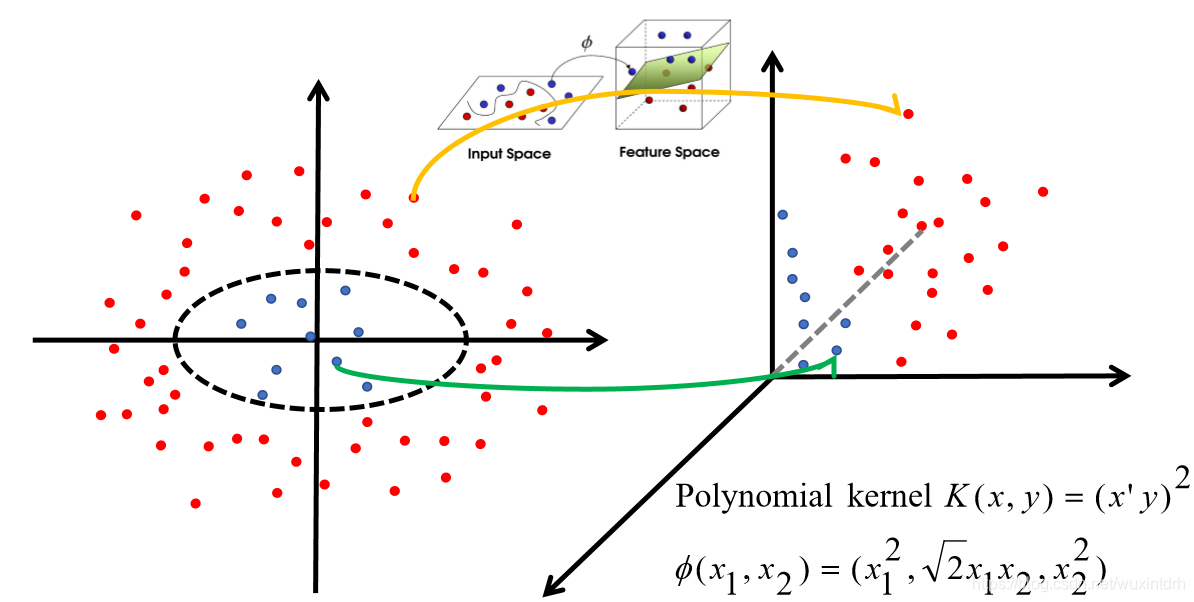
将每个样本进行一个投射到高维空间的处理,然后再将处理后的数据使用普通的k-means算法思想进行聚类。
五、 k-medoids(k-中心聚类算法)
5.1、原理
K-medoids和K-means是有区别的,不一样的地方在于中心点的选取:
-
K-means中,将中心点取为当前cluster中所有数据点的平均值,对异常点很敏感!
-
K-medoids法选取的中心点为当前cluster中存在的一点,准则函数是当前cluster中所有其他点到该中心点的距离之和最小,这就在一定程度上削弱了异常值的影响,但缺点是计算较为复杂,耗费的计算机时间比K-means多。
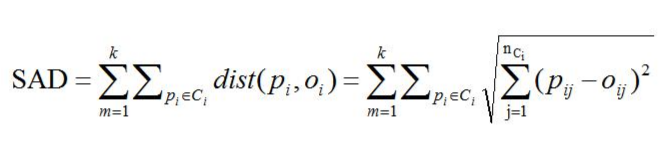
K-medoids使用绝对差值和(Sum of Absolute Differences,SAD)的度量来衡量聚类结果的优劣,在n维空间中,计算SAD的公式如下所示:
5.1、算法流程
- ( 1 )总体n个样本点中任意选取k个点作为medoids
- ( 2 )按照与medoids最近的原则,将剩余的n-k个点分配到当前最佳的medoids代表的类中
- ( 3 )对于第i个类中除对应medoids点外的所有其他点,按顺序计算当其为新的medoids时,代价函数的值,遍历所有可能,选取代价函数最小时对应的点作为新的medoids
- ( 4 )重复2-3的过程,直到所有的medoids点不再发生变化或已达到设定的最大迭代次数
- ( 5 )产出最终确定的k个类
5.2、K-Menas与K-Medoids的对比

六、ISODATA(迭代自组织数据分析算法)
在K-均值算法的基础上,对分类过程增加了“合并”和“分裂”两个操作,并通过设定参数来控制这两个操作的一种聚类算法。
- “合并”:当聚类结果某一类中样本数太少,或两个类间的距离太近
- “分裂”:当聚类结果中某一类的类内方差太大,将该类进行分裂
七、Mini Batch K-Means(适合大数据的聚类算法)
大数据量是什么量级?通过当样本量大于1万做聚类时,就需要考虑选用Mini Batch K-Means算法。
Mini Batch KMeans使用了Mini Batch(分批处理)的方法对数据点之间的距离进行计算。 Mini Batch 计算过程中不必使用所有的数据样本,而是从不同类别的样本中抽取一部分样本来代表 各自类型进行计算。由于计算样本量少,所以会相应的减少运行时间,但另一方面抽样也必然会带 来准确度的下降。
小结


















 3126
3126

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









