






这是一篇发表在2020年KDD上的一篇文章,在本文中,作者提出了一种基于自注意力网络的地理感知序列推荐模型,其主要有以下三种特点:(1)提出了一个基于重要性采样的的损失函数,通过使用信息负样本来解决数据稀疏的问题。(2)提出了一个基于自注意力的地理编码器,来表示地理位置。(3)提出了具有地理感知的负样本,来提高负样本的信息性。
1.符号定义
用户的一条移动轨迹定义为:
S
u
=
r
1
u
→
r
2
u
→
⋯
→
r
n
u
S^u=r_1^u \rightarrow r_2^u \rightarrow \cdots \rightarrow r_n^u
Su=r1u→r2u→⋯→rnu
其中,
r
i
u
=
(
u
,
t
i
,
l
i
,
p
i
)
r_i^u=\left(u, t_i, l_i, p_i\right)
riu=(u,ti,li,pi)代表用户在时间
t
i
t_i
ti访问某一经纬度的位置。
本文所研究的问题是根据当前轨迹信息预测下一个位置。
2. 模型结构
2.1 地理感知自注意力网络
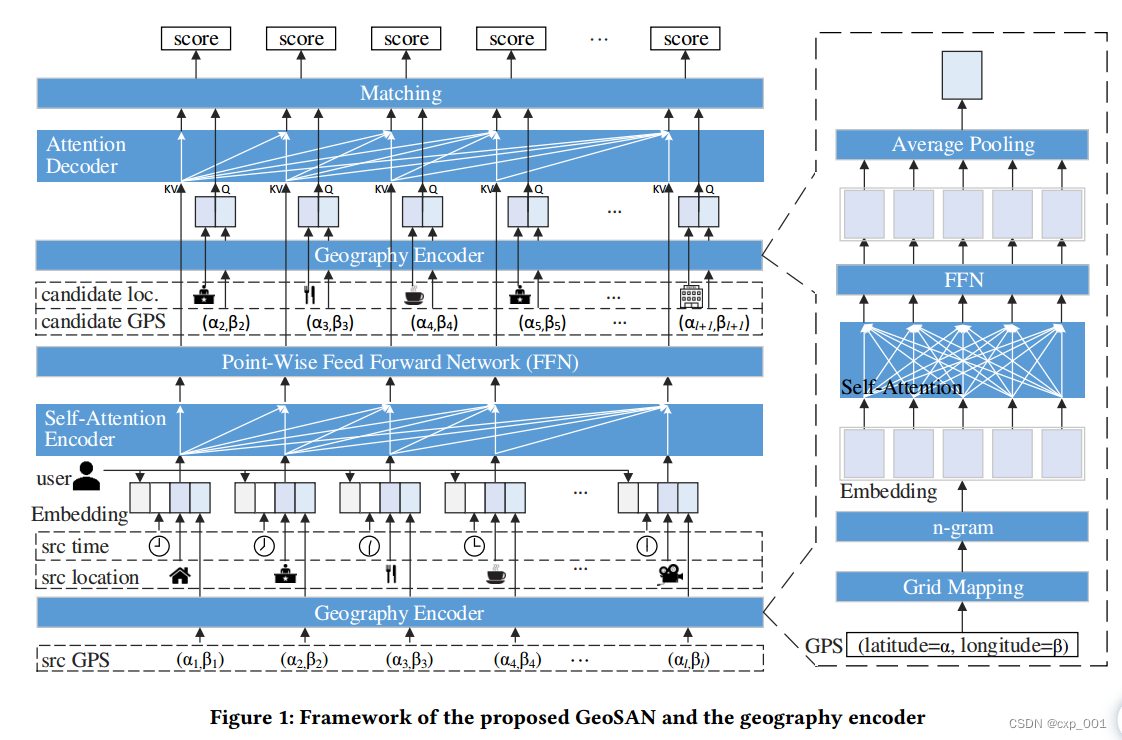
作者将轨迹划分为长度为m的序列,分别对序列中的user、hour、location信息进行嵌入,并使用地理编码器对精确地址(GPS)进行编码。然后将这些特征拼接,得到 E ∈ R m × d \boldsymbol{E} \in \mathbb{R}^{m \times d} E∈Rm×d.
然后作者使用自注意力来转换
E
E
E,使用三个不同的矩阵
W
Q
,
W
K
,
W
V
∈
R
d
×
d
W_Q,W_K,W_V\in\mathbb{R}^{d\times d}
WQ,WK,WV∈Rd×d,
S
=
SA
(
E
)
=
attention
(
E
W
Q
,
E
W
K
,
E
W
V
)
(
1
)
S=\operatorname{SA}(E)=\operatorname{attention}(EW_Q,EW_K,EW_V)\quad\quad(1)
S=SA(E)=attention(EWQ,EWK,EWV)(1)
2.1.1 注意力编码器
其中attention使用的是自注意点积注意力,
Atention ( Q , K , V ) = softmax ( Q K T d ) V ( 2 ) \operatorname{Atention}(Q,K,V)=\operatorname{softmax}(\dfrac{QK^T}{\sqrt{d}})V\quad\quad(2) Atention(Q,K,V)=softmax(dQKT)V(2)
最终s的维度是
R
m
×
d
\mathbb{R}^{m\times d}
Rm×d。
然后将s输入到前馈神经网络:
F i = FFN ( S i ) = max ( 0 , S i W 1 + b 1 ) W 2 + b 2 ( 3 ) F_i=\operatorname{FFN}(S_i)=\max(0,S_iW_1+\boldsymbol{b_1})W_2+\boldsymbol{b_2}\quad\quad(3) Fi=FFN(Si)=max(0,SiW1+b1)W2+b2(3)
其中,
W
1
∈
R
d
×
d
h
,
W
2
∈
R
d
h
×
d
W_1\in\mathbb{R}^{d\times d_h},W_2\in\mathbb{R}^{d_h\times d}
W1∈Rd×dh,W2∈Rdh×d。
在堆叠多个自注意块时,在FFN和自注意层中使用残差连接和层归一化,以稳定和加速训练过程。
2.1.2 地理感知注意力解码器
为了改善输入序列相对于目标位置的表示,作者引入了目标感知注意力解码器,
A
=
decoder
(
F
(
l
)
∣
T
)
=
Attempt
(
T
,
F
(
l
)
W
,
F
(
l
)
)
(
4
)
A=\operatorname{decoder}(F^{(l)}|\mathbf{T})=\operatorname{Attempt}(\mathbf{T},\mathbf{F}^{(l)}W,\mathbf{F}^{(l)})\quad\quad(4)
A=decoder(F(l)∣T)=Attempt(T,F(l)W,F(l))(4)
其中,
T
∈
R
n
×
d
T
T\in\mathbb{R}^{n\times d_{T}}
T∈Rn×dT是输出序列的表示矩阵,由候选位置的嵌入向量与其地理信息的表示向量拼接而成。
W是一个矩阵,用于将查询和键映射到相同的潜在空间。
2.1.3 计算匹配函数
作者将输入序列
A
i
A_i
Ai和候选位置
T
j
T_j
Tj进行匹配,得到一个匹配分数,
y
i
,
j
=
f
(
A
i
,
T
j
)
,
(
5
)
y_{i,j}=f(\mathbf{A}_i,\mathbf{T}_j),\quad\quad\quad(5)
yi,j=f(Ai,Tj),(5)
其中,
T
j
T_j
Tj是候选位置
j
j
j的表示向量。
2.2 地理编码器
为了捕捉地理位置之间的相互关系,作者提出了地理编码器来将位置的经纬度信息进行网格划分,然后使用自注意力网络来对网格的quadkey表示进行嵌入。
作者使用Tile Map System将地图投影到一个平面上,然后,每次将平面一分为4,再继续划分,最终平面的索引组成地理位置的quadkey。
然后,对包含经纬度信息的位置表示quadkey,作者对其进行了编码。如果直接对最后一层的quadkey直接进行编码会丧失位置之间的距离关系,作者将quadkey视为一个序列,然后对其进行n-gram划分,使用自注意力网络对序列进行编码,然后使用平均池化对来聚合n-gram表示的序列。
2.3 重要性采用损失函数
作者认为随着候选位置数量的增加,传统的交叉熵损失函数是无效的(?why),现阶段大部分使用二元交叉熵损失函数(和我理解的不太一样):
−
∑
S
u
∈
S
∑
i
=
1
n
(
log
σ
(
y
i
,
o
i
)
+
∑
k
∉
L
u
log
(
1
−
σ
(
y
i
,
k
)
)
)
,
(
7
)
-\sum\limits_{S^u\in S}\sum\limits_{i=1}^n\left(\log\sigma(y_{i,o_i})+\sum\limits_{k\not\in L^u}\log(1-\sigma(y_{i,k}))\right),\quad(7)
−Su∈S∑i=1∑n
logσ(yi,oi)+k∈Lu∑log(1−σ(yi,k))
,(7)
其中,
L
u
L^u
Lu是用户曾经到过的位置的集合,该公式每次都从用户未到过的地方采样一个负样本(不是可以采样k个吗)。
作者认为只采样一个负位置会导致数据利用不充分,因此应该多采几个。但是,如果以偏好得分前k个作为负样本是不可取的,因为它们可能是用户接下来要访问的位置;根据偏好得分计算概率进行采样也是不可行的,因为效率问题。
作者提出了建议对所有未访问过的位置进行加权,
−
∑
S
u
∈
S
∑
i
=
1
n
(
log
σ
(
y
i
,
o
i
)
+
∑
k
≠
L
u
P
(
k
∣
i
)
log
(
1
−
σ
(
y
i
,
k
)
)
)
,
(
8
)
-\sum\limits_{S^u\in S}\sum\limits_{i=1}^n\left(\log\sigma(y_{i,o_i})+\sum\limits_{k\neq L^u}P(k|i)\log(1-\sigma(y_{i,k}))\right),\quad(8)
−Su∈S∑i=1∑n
logσ(yi,oi)+k=Lu∑P(k∣i)log(1−σ(yi,k))
,(8)
其中,
P
(
k
∣
i
)
P(k|i)
P(k∣i)是所有负样本中偏好分数的概率:
P
(
k
∣
i
)
=
exp
(
r
i
,
k
/
T
)
∑
k
′
∉
L
u
exp
(
r
i
,
k
′
/
T
)
(
9
)
P(k|i)=\dfrac{\exp{(r_{i,k}/T)}}{\sum_{k'\notin L^u}\exp{(r_{i,k'}/T)}}\quad\quad\quad(9)
P(k∣i)=∑k′∈/Luexp(ri,k′/T)exp(ri,k/T)(9)
其中,
r
i
,
k
r_{i,k}
ri,k是第i步对位置k的偏好分数。
同样,在计算概率归一化的时候,仍然会存在之前提到的效率很低的问题。
作者使用非归一化概率
Q
~
(
k
∣
i
)
\begin{aligned}\tilde{Q}(k\text{}|i)\end{aligned}
Q~(k∣i)来代替原始的概率分布
Q
(
k
∣
i
)
\text{}Q(k\text{}|\text{}i)
Q(k∣i),最终损失函数计算如下:
−
∑
S
a
∈
S
∑
i
=
1
n
(
log
σ
(
y
i
,
o
i
)
+
∑
k
=
1
K
w
k
log
(
1
−
σ
(
y
i
,
k
)
)
)
,
(
10
)
\quad-\sum\limits_{S^a\in S}\sum\limits_{i=1}^n\left(\log\sigma(y_{i,o_i})+\sum\limits_{k=1}^K w_k\log\left(1-\sigma(y_{i,k})\right)\right),\quad(10)
−Sa∈S∑i=1∑n(logσ(yi,oi)+k=1∑Kwklog(1−σ(yi,k))),(10)
(脑子懵懵的,不是很懂)
其中,
w
k
=
exp
(
r
i
,
k
/
T
−
ln
Q
~
(
k
∣
i
)
)
∑
k
′
=
1
K
exp
(
r
i
,
k
′
/
T
−
ln
Q
~
(
k
′
∣
i
)
)
w_k\:=\:\frac{\exp\left(r_{i,k}/T-\ln\tilde{Q}(k|i)\right)}{\sum_{k'=1}^{K}\exp\left(r_{i,k'}/T-\ln\tilde{Q}(k'|i)\right)}
wk=∑k′=1Kexp(ri,k′/T−lnQ~(k′∣i))exp(ri,k/T−lnQ~(k∣i))。
在K个地点中,偏好分数越大的地点被赋予的权重越大。(why)
2.4 地理感知负采样器
作者认为位置中的地理信息也可以帮助区分未访问位置的消极性,例如当前访问位置的周围位置更有可能是消极的(????)。作者建议在地理感知的负样本中,建议首先检索K个离目标位置最近的位置,然后从这K个候选点中随机抽取负样本。作者考虑了基于均匀分布和基于流行度分布的两种抽样方式。在基于流行度的抽样方式中,作者建议使用概率分布 Q ( k ∣ i ) ~ ∝ ln ( c k + 1 ) \tilde{Q(k|i)}\propto\text{ln}(c_k+1) Q(k∣i)~∝ln(ck+1),其中, c k c_k ck是轨迹历史中出现的频率。
模型的结构图放上来:
3.实验
3.1 数据集
作者使用了三个真实世界的数据集,: Gowalla, Brightkite,
Foursquare
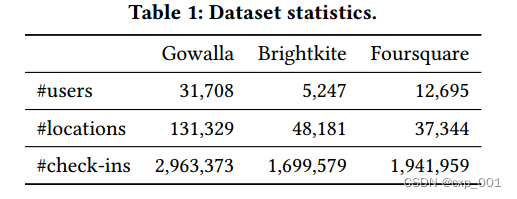
对于每个用户的签入序列,作者使用以前未访问过的位置的最后一个签入记录进行评估,并在此之前的所有签到序列进行培训。
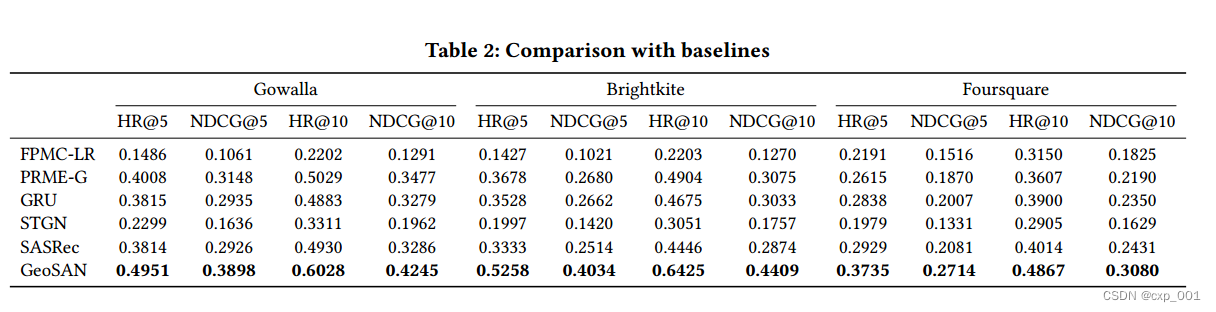
3.2 baseline
(1)PRME-G:度量学习
(2)FPMC-LR:因式分解
(3)GRU
(4)SASRec:使用自注意力机制
(5)STGN:使用时空门增强LSTM网络
3.3 metrics
命中率和NDCG
3.4 result
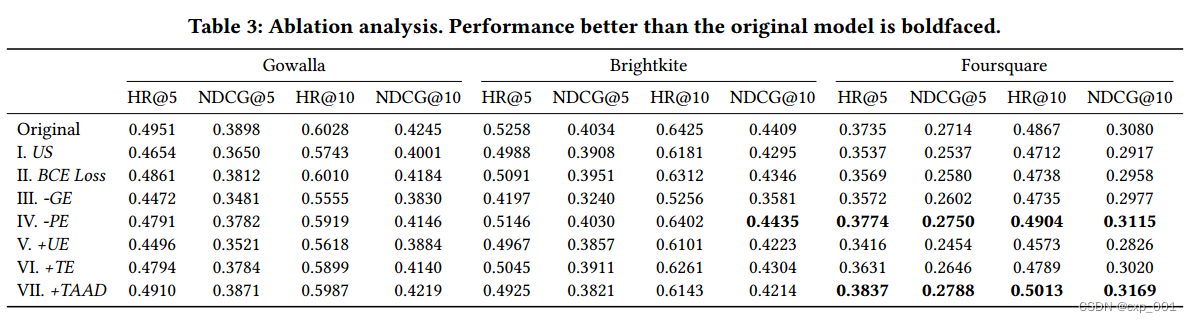
3.5 消融实验
作者考虑了以下几个模型的变体:
(1)US(Uniform Sampler):在所有位置使用统一负采样器。
(2)BCE(二元交叉熵)损失:使用二元交叉熵损失,不给负样本分配权重。
(3)Remove GE (Geography Encoder):移除地理编码器,只使用位置嵌入来表示。
(4)Remove PE (Positional Embedding) in GE:去掉了地理编码器中使用的位置嵌入,它会在一个quadkey中注入每个n-gram token的相对位置信息。(不懂)
(5)Add UE (User Embedding): 将用户嵌入添加到签入序列编码器。
(6)Add TE (Time Embedding):添加一个时间嵌入。
(7)Add TAAD (Target-Aware Attention Decoder):添加了目标感知注意力解码器。
最终结果:
4.结论
简单来说,本文作者提出了一个新的模型来实现下一个位置的推荐,主要贡献课总结为三点:(1)提出了一种新的基于重要性抽样的损失函数,可以更好地利用信息性负样本。(2)提出了一种新的地理编码器来融合地理信息。(3)提出了地理感知的负向采样器,以提高样本负向位置的信息量。
论文链接:paper



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











