







这是一篇采用基于EPR方法的人类轨迹生成方向的论文。这篇论文在建模人类移动模式时考虑了时间、空间和社交三个维度。
一、STS-EPR模型
该模型的运行包含四个阶段,分别为初始化阶段、动作选择阶段、位置选择阶段、动作修正阶段。

首先,将区域划分为 L = < ( r 1 , w 1 ) , ( r 2 , w 2 ) , . . . ( r n , w n ) > L=<(r_1,w_1),(r_2,w_2),...(r_n,w_n)> L=<(r1,w1),(r2,w2),...(rn,wn)>,其中, w i w_i wi是某一个块的权重。
然后,用户a的访问模式由一个向量 l v a lv_a lva来表示, l v a [ j ] lv_a[j] lva[j]表示 a a a访问地区 j j j的次数。
然后,用户的社交关系用一个图 G G G来表示。
模型还有一个日志生成器MDG。
1.1 初始化
用户的行为日志由Markov方法来生成, M D a = < ( a b 0 , t 1 ) , . . . , ( a b n , t n ) , . . . > MD_a=<(ab_0,t_1),...,(ab_n,t_n),...> MDa=<(ab0,t1),...,(abn,tn),...>。初始位置由区域的权重影响。
1.2 动作选择
动作分为探索和返回,其中以 P e x p = ρ S − γ P_{exp}=\rho S^{-\gamma} Pexp=ρS−γ的概率来进行探索,以 P r e t = 1 − ρ S − γ P_{ret}=1-\rho S^{-\gamma} Pret=1−ρS−γ的概率进行返回。
1.3 位置选择
首先,一个人访问某个地点的概率计算为:
(1)个人探索:
使用Gravity概率,
(2)社会探索:

(3)个人返回:

(4)社会返回:

1.4 动作修正
(1)社会选择为空集:
选择相应的个人选择。
(2)没有新位置探索:
进行个人返回。
(3)没有位置可进行返回:
进行个人探索。
二、实验
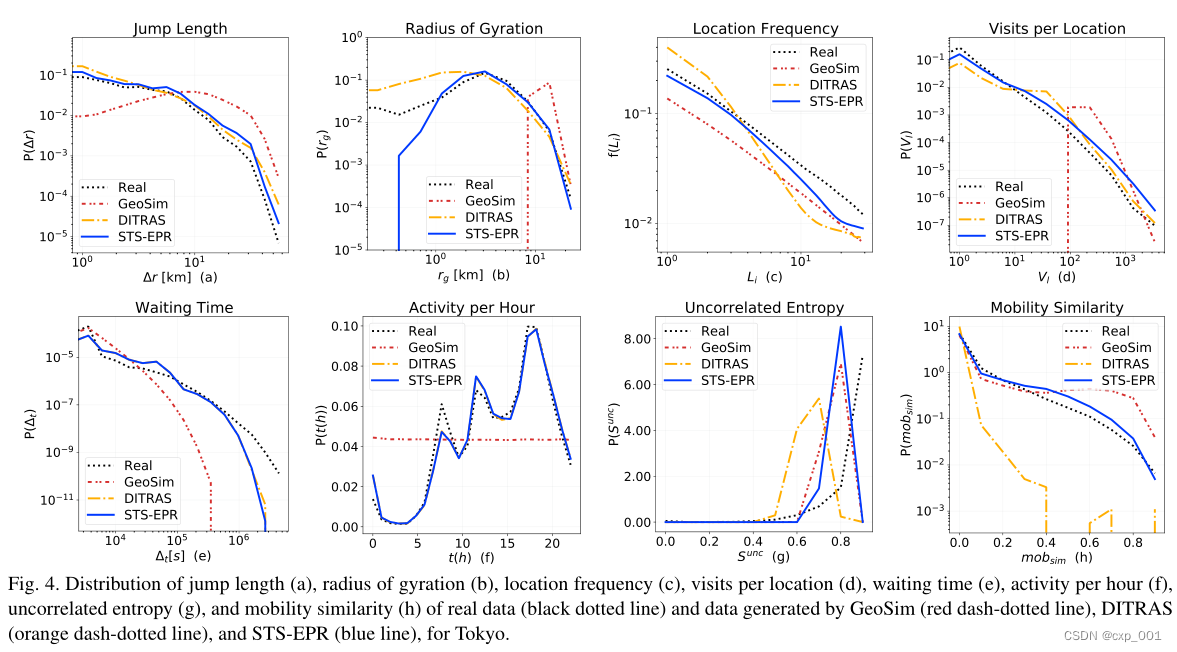
作者选用了来自纽约、伦敦、东京三个城市的用户签到数据。baseline选择了Geosim、Ditras。
实验指标:
(1)JumpLength:两个连续位置之间的距离。
(2)Radius of Gyration rg:一个人在观察期间所走过的典型距离。
(3)每个位置 VI 的访问量,一个位置的相关性被描述为它在集体层面的吸引力;
(4)Location Frequency:访问一个位置ri的概率。
(5)等待时间Δt,两个连续访问位置之间经过的时间;
(6)熵
E
u
n
c
E_{unc}
Eunc:个人运动的可预测性。
(7)每小时活动
t
(
h
)
t(h)
t(h):个人在一天中的每个小时所做的移动次数。
(8)移动性相似性
m
o
b
s
i
m
mob_{sim}
mobsim:两个人的位置向量的余弦相似度。
用KL散度来计算合成轨迹和真实轨迹之间的指标相似度。
结果如下图所示:



三、结论
提出了一种机械生成模型,该模型在合成移动轨迹的生成过程中同时考虑了空间、时间和社会维度。我们的结果表明,与缺乏社会、空间或时间机制的现有模型相比,同时对所有三个维度进行建模会产生更真实的轨迹。
未来改进的机会包括嵌入深度学习技术(例如,生成对抗网络和变分自动编码器)来对当前机制未捕获的移动性方面进行建模 。与此同时,我们的模型朝着设计机械模型迈出了一步,该模型可以完整地捕捉人类移动的所有方面。
















 619
619











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











