








前言:
为了方便查看博客,特意申请了一个公众号,附上二维码,有兴趣的朋友可以关注,和我一起讨论学习,一起享受技术,一起成长。

1. 定义
脉冲宽度调制:是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。(百度百科)它是一种对模拟信号电平进行数字编码的方法,通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。
SPWM波形: 脉冲宽度按正弦规律变化而和正弦波等效的 PWM 波形。
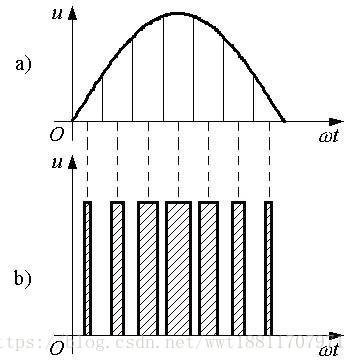
把正弦半波波形分成N等份,就可把正弦半波看成由N个彼此相连的脉冲所组成的波形。如果把上述脉冲序列用同样数量的等幅而不等宽的矩形脉冲序列代替,使矩形脉冲的中点和相应正弦等分的中点重合,且使矩形脉冲和相应正弦部分面积(即冲量)相等,就得到一组脉冲序列,这就是PWM波形。根据冲量相等,效果相同的原理,PWM波形和正弦半波是等效的,如上图。
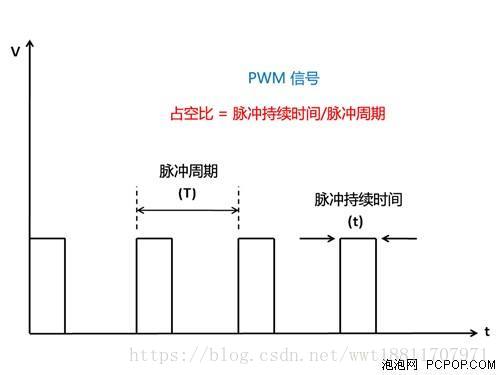
pwm的频率:指每秒钟信号从高电平到低电平再回到高电平的次数。
占空比: 输出的PWM中,高电平保持的时间与该 PWM 的时钟周期的时间之比。
分辨率: 是占空比最小能达到多少,如8位的PWM:理论的分辨率就是1:255(单斜率), 16位的的PWM理论就是1:65535(单斜率)。
PWM 是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。只要带宽足够,任何模拟值都可以使用PWM进行编码。
PWM 调制出的交流电压值主要取决于我们所控制的占空比(电压 = 占空比 X 幅值),调制出来的交流电压的波形精度取决于所设定的载波频率。
2. 电机驱动
对于 PWM 波的输出配置,可以参考STM32学习笔记一一PWM 输出
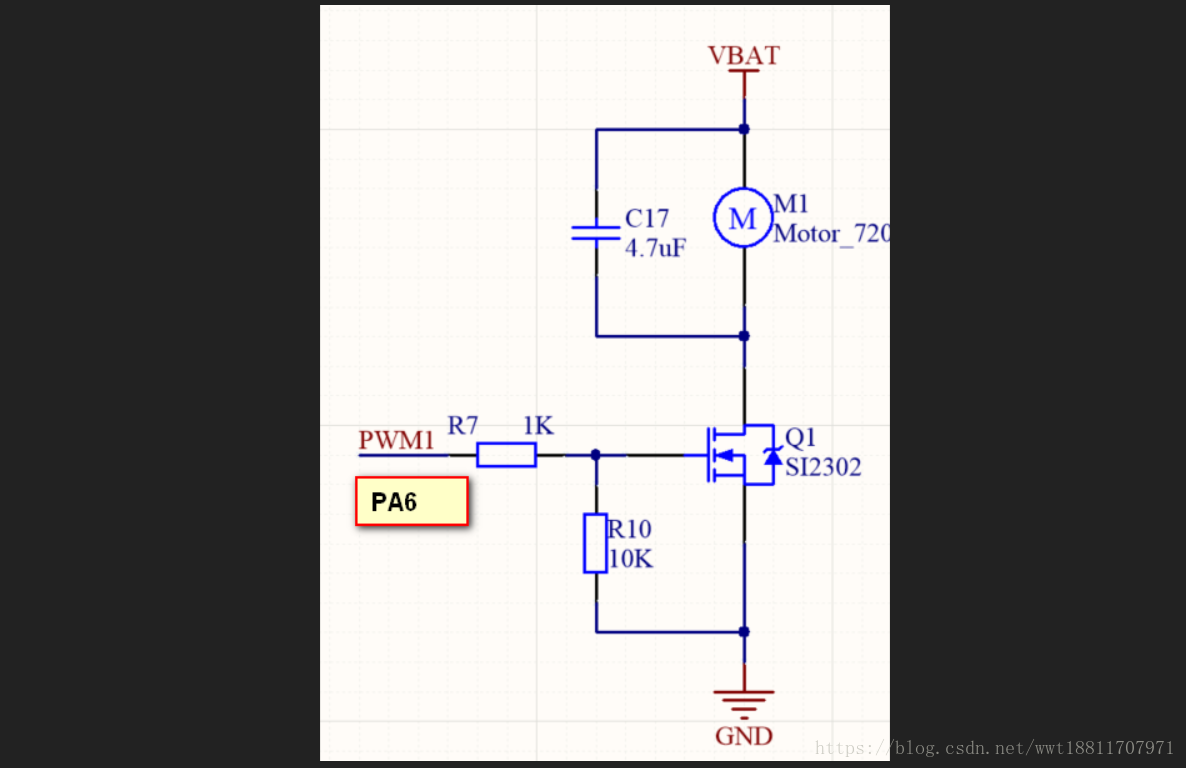
2.1 电路连接:
2.2 软件实现:
头文件:
#ifndef __MOTOR__H_
#define __MOTOR__H_
#include "system.h"
#define MOTOR1_PWM GPIO_Pin_6
#define MOTOR_PWMMAX 1000
void MOTOR_GPIO_Init(void);
void TIM3_PWM_Init(void);
void MOTOR_Control(int16_t motor1_pwm);
#endif
/******************************************************************************************
* 函 数:void MOTOR_GPIO_Init(void)
* 功 能:电机引脚初始化
* 参 数:无
* 返回值:无
* 备 注:TIM3 CH1(PWM1) -> PA6
*******************************************************************************************/
void MOTOR_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Pin = MOTOR1_PWM;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // GPIO复用推挽输出
GPIO_Init(GPIOA,&GPIO_InitStructure);
//GPIO_SetBits(GPIOA,MOTOR1_PWM);
}
/******************************************************************************************
* 函 数:void TIM3_PWM_Init(void)
* 功 能:定时器输出和PWM配置
* 参 数:无
* 返回值:无
* 备 注:TIM3 CH1
*******************************************************************************************/
void TIM3_PWM_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定时器变量
TIM_OCInitTypeDef TIM_OCInitStructure; //输出比较结构体变量
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
TIM_TimeBaseInitStructure.TIM_Period = 1000-1; //设置自动重装载的周期值;f=72M/1000=72KHz
TIM_TimeBaseInitStructure.TIM_Prescaler = 100; //设置预分频值
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM1模式
TIM_OCInitStructure.TIM_Pulse = 0; //初始化占空比为0
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//输出极性高
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OC1Init(TIM3,&TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM3,TIM_OCPreload_Enable); //使能TIMx在ARR上的预装载寄存器
TIM_Cmd(TIM3,ENABLE);
}
测试:
#include "stm32f10x.h"
#include "led.h"
#include "systick.h"
#include "motor.h"
int main(void)
{
uint8_t dir=1;
uint16_t motor1_pwmval=0;
SysTick_Init();
LED_Init();
MOTOR_GPIO_Init();
TIM3_PWM_Init();
while(1)
{
USER_LED_ON();
delay_ms(500);
USER_LED_OFF();
delay_ms(500);
if(dir)
motor1_pwmval++;
else
motor1_pwmval--;
if(motor1_pwmval>999)
dir=0;
if(motor1_pwmval==0)
dir=1;
TIM_SetCompare1(TIM3,motor1_pwmval); //设置占空比0-999
}
}
连接好电路,下载程序,可观察到小电机停止–转动–停止循环。
参考:
1.PWM波的介绍














 1419
1419











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









