







前段时间参加了一个表盘指针读数的比赛,今天来总结一下
数据集一共有一千张图片:
方法一:径向灰度求和
基本原理:
将图像以表盘圆心转换成极坐标,然后通过矩阵按行求和找到二值图最大值即为指针尖端
导入需要用到的包
import cv2 as cv
import numpy as np
import math
from matplotlib import pyplot as plt
import os
图像预处理
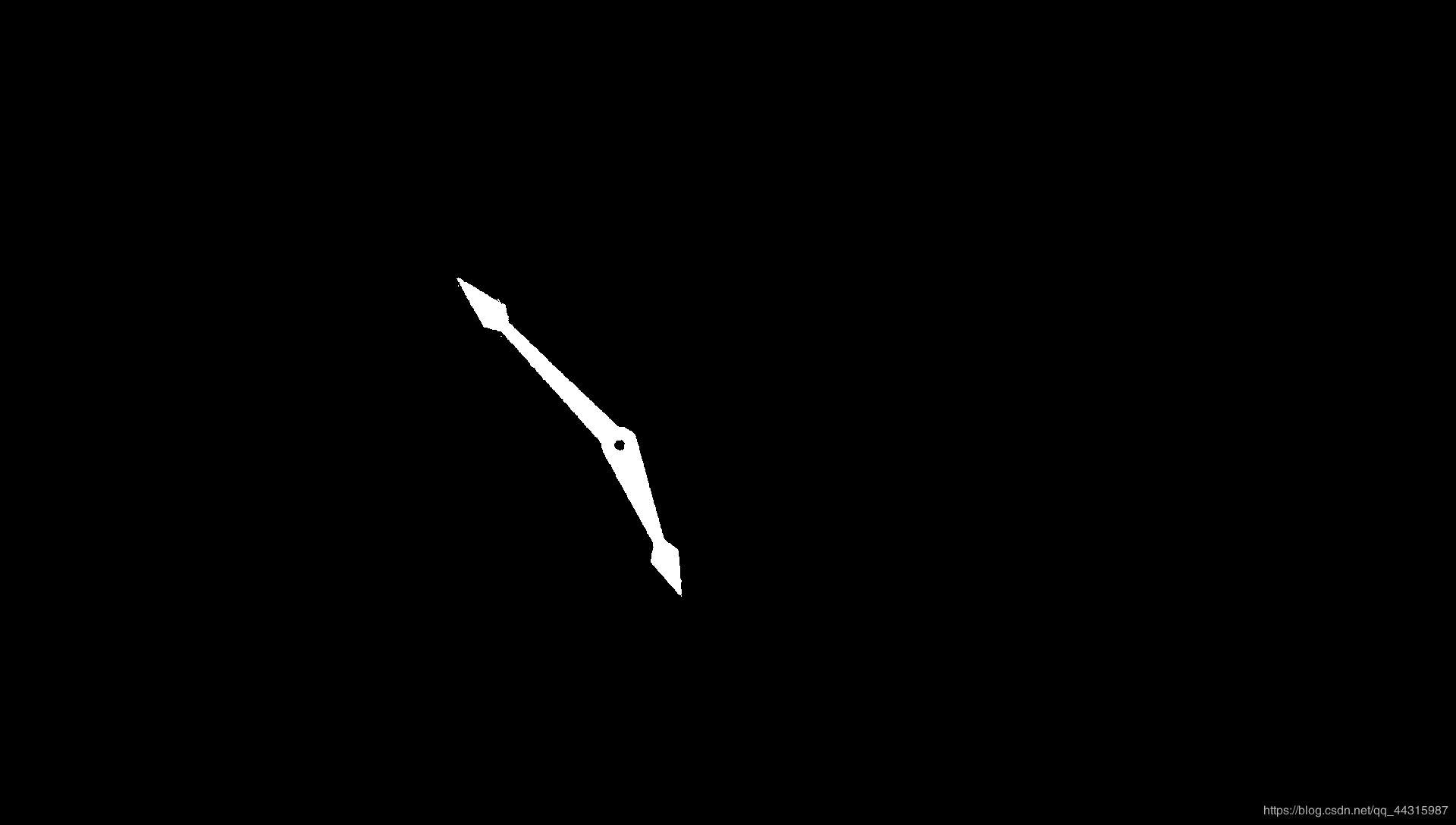
去除背景:利用提取红色实现
def extract_red(image):
"""
通过红色过滤提取出指针
"""
red_lower1 = np.array([0, 43, 46])
red_upper1 = np.array([10, 255, 255])
red_lower2 = np.array([156, 43, 46])
red_upper2 = np.array([180, 255, 255])
dst = cv.cvtColor(image, cv.COLOR_BGR2HSV)
mask1 = cv.inRange(dst, lowerb=red_lower1, upperb=red_upper1)
mask2 = cv.inRange(dst, lowerb=red_lower2, upperb=red_upper2)
mask = cv.add(mask1, mask2)
return mask
获得钟表中心:轮廓查找,取出轮廓的外接矩形,根据矩形面积找出圆心
def get_center(image):
"""
获取钟表中心
"""
edg_output = cv.Canny(image, 100, 150, 2) # canny算子提取边缘
cv.imshow('dsd', edg_output)
# 获取图片轮廓
contours, hireachy = cv.findContours(edg_output, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
center = []
cut=[0, 0]
for i, contour in enumerate(contours):
x, y, w, h = cv.boundingRect(contour) # 外接矩形
area = w * h # 面积
if area < 100 or area > 4000:
continue
cv.rectangle(image, (x, y), (x + w, y + h), (255, 0, 0), 1)
cx = w / 2
cy = h / 2
cv.circle(image, (np.int(x + cx), np.int(y + cy)), 1, (255, 0, 0)) ## 在图上标出圆心
center = [np.int(x + cx), np.int(y + cy)]
break
return center[::-1]

由上面的图像可以看出,圆心定位还是非常准确的
图片裁剪
def ChangeImage(image):
"""
图像裁剪
"""
# 指针提取
mask = extract_red(image)
mask = cv.medianBlur(mask,ksize=5)#去噪
# 获取中心
center = get_center(mask)
# 去除多余黑色边框
[y, x] = center
cut = mask[y-300:y+300, x-300:x+300]
# 因为mask处理后已经是二值图像,故不用转化为灰度图像
return cut
剪裁后的图像如下图所示:

极坐标转换
注意:需要将图片裁剪成正方形
def polar(image):
"""
转换成极坐标
"""
x, y = 300, 300
maxRadius = 300*math.sqrt(2)
linear_polar = cv.linearPolar(image, (y, x), maxRadius, cv.WARP_FILL_OUTLIERS + cv.INTER_LINEAR)
mypolar = linear_polar.copy()
#将图片调整为从0度开始
mypolar[:150, :] = linear_polar[450:, :]
mypolar[150:, :] = linear_polar[:450, :]
cv.imshow("linear_polar", linear_polar)
cv.imshow("mypolar", mypolar)
return mypolar
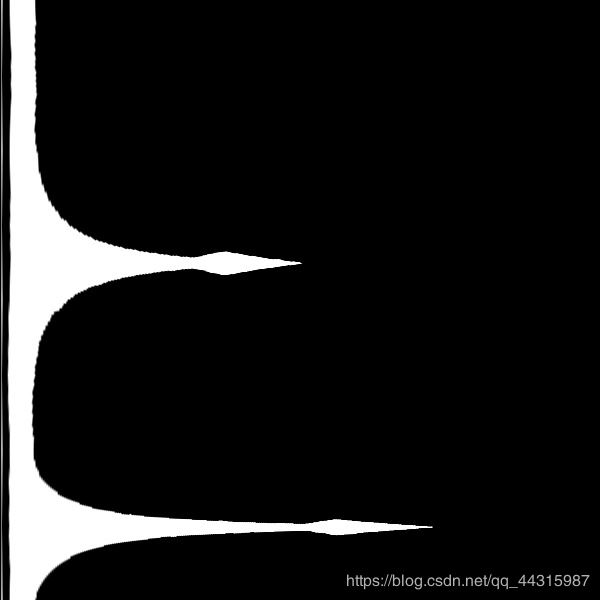
由图像就可以很容易发现指针的顶点
计算角度
def Get_Reading(sumdata):
"""
读数并输出
"""
peak = []
# s记录遍历时波是否 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 7631
7631











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









