






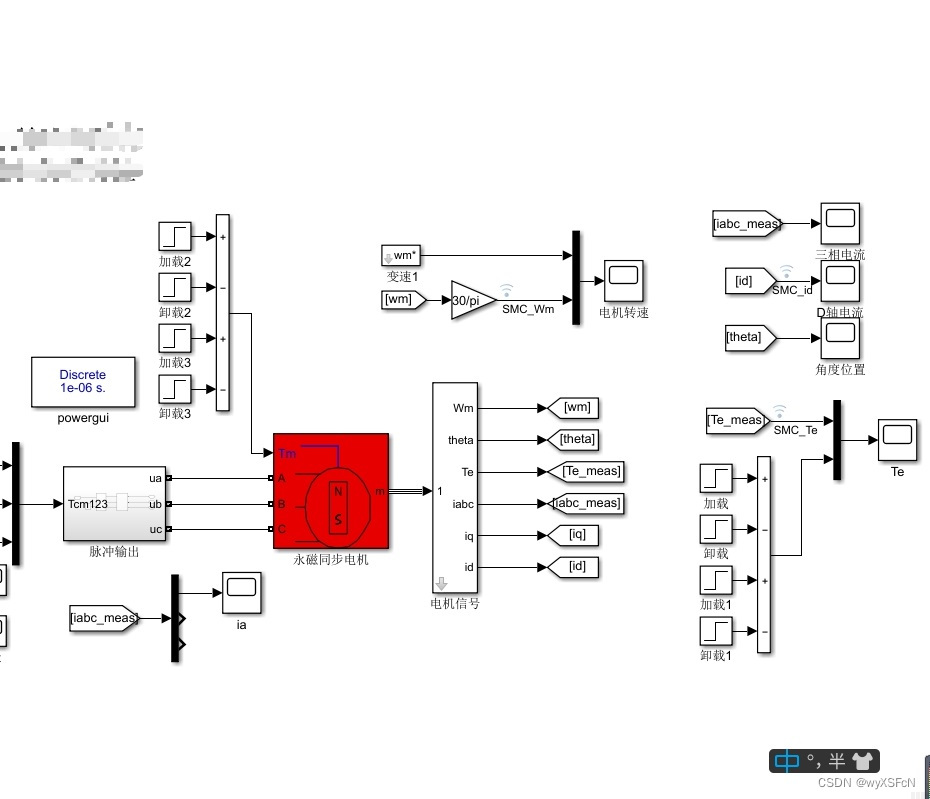
永磁同步模型电流预测控制+广义预测控制(速度环)
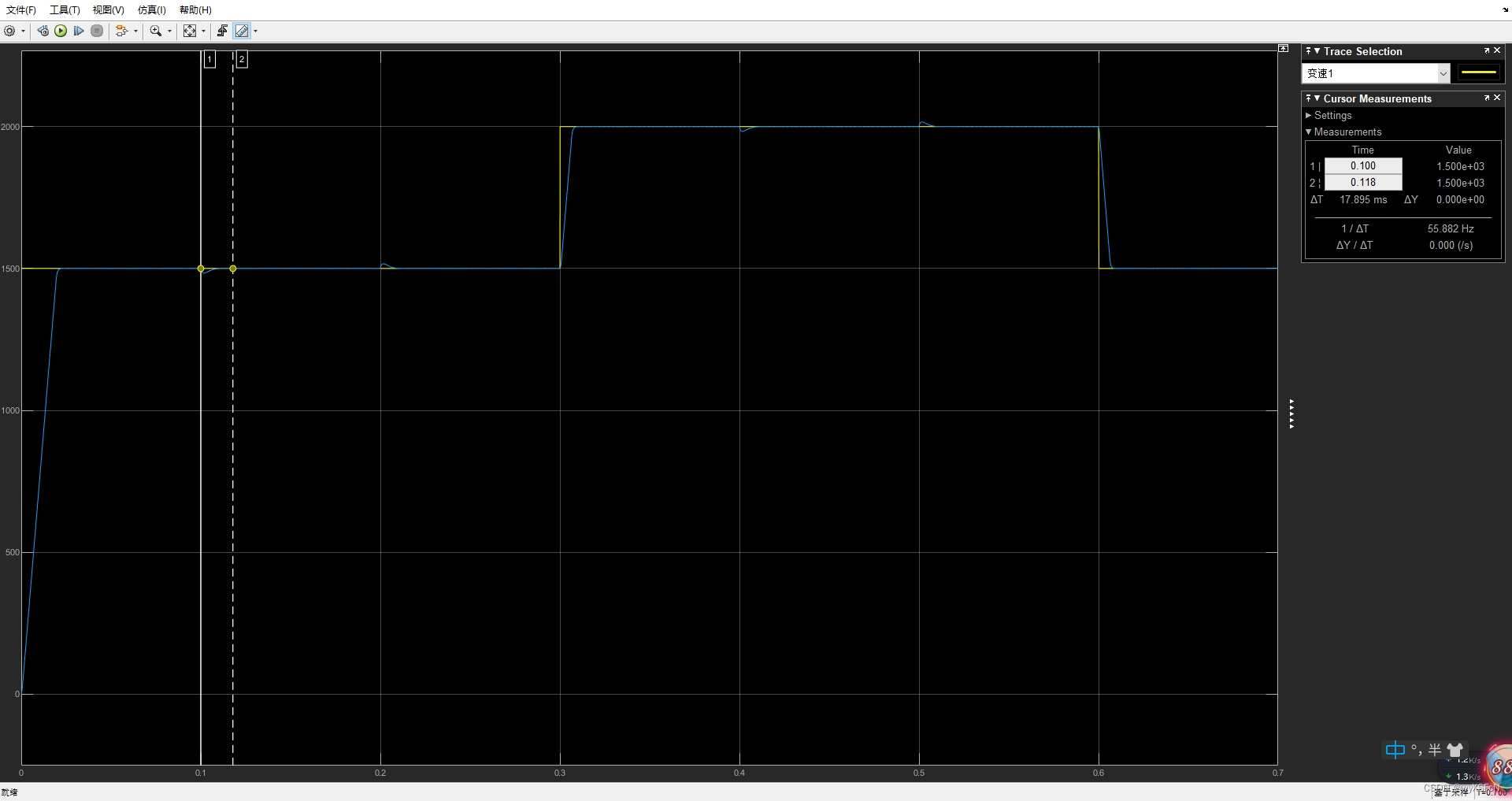
速度环预测控制采用广义预测与扩展状态观测器结合,提高系统鲁棒性和稳态特性。
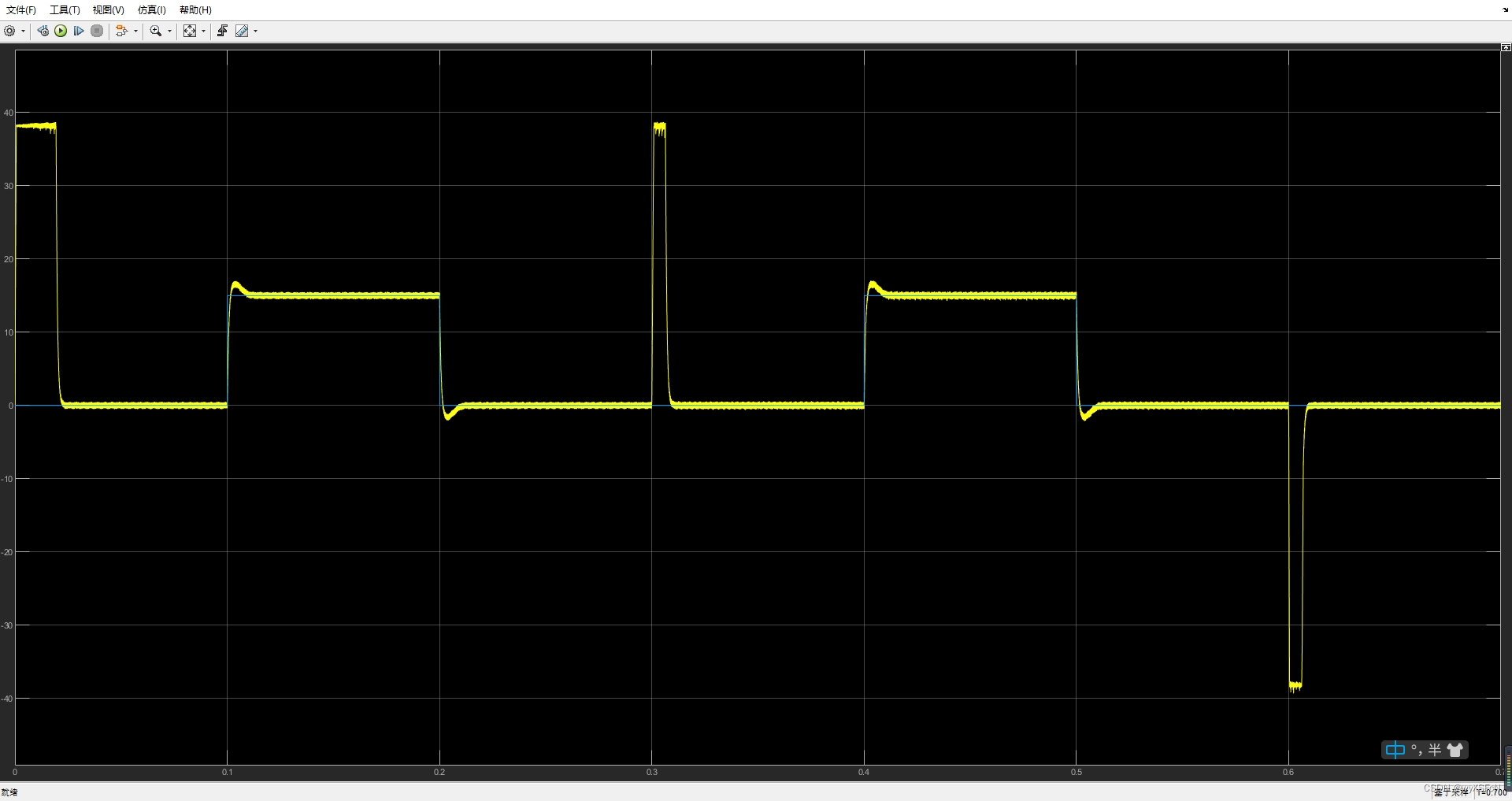
电流环采用预测控制双矢量改进算法。
含有对应学习文献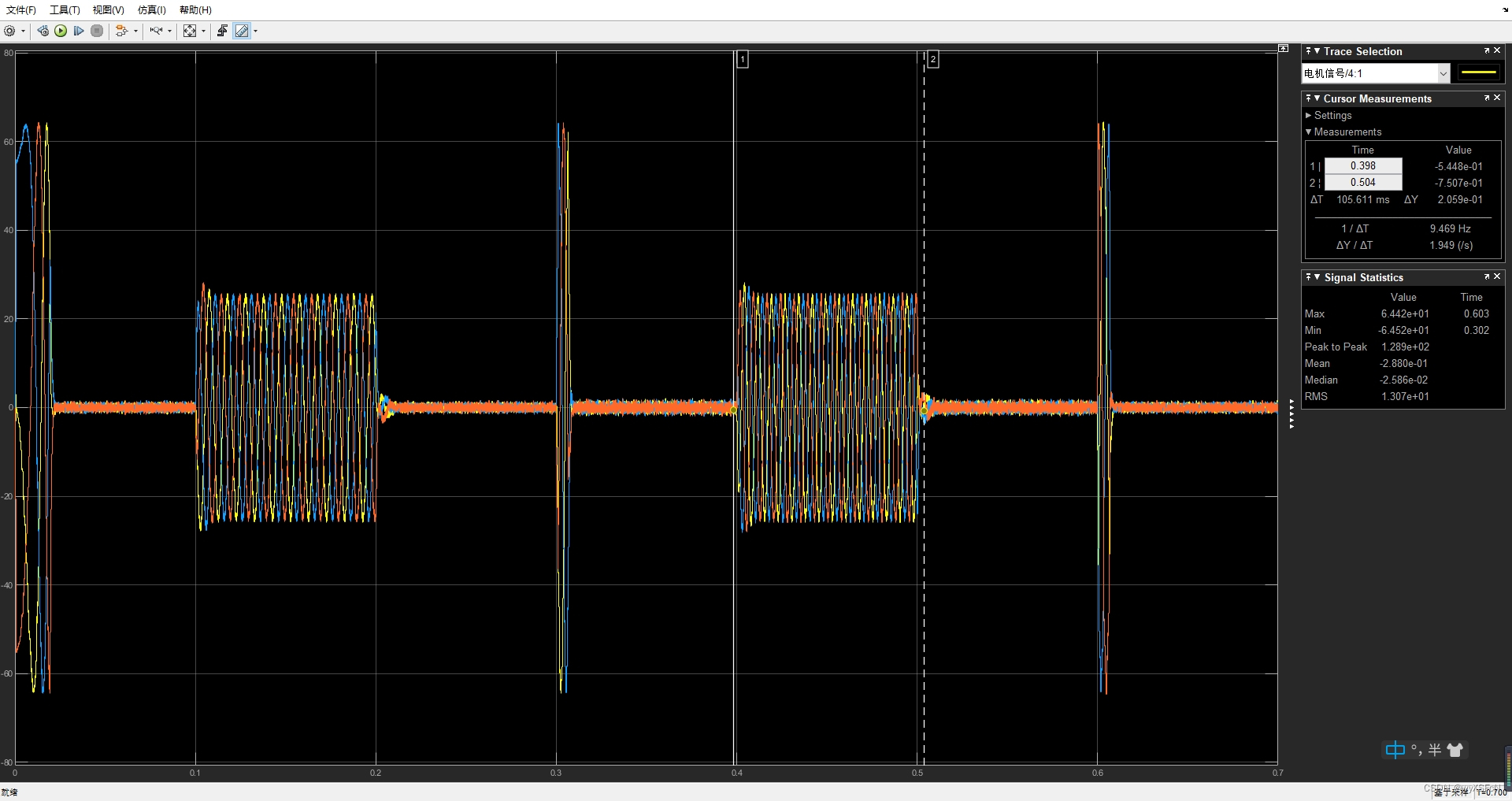
永磁同步模型电流预测控制+广义预测控制(速度环)
随着科技的不断发展,近年来永磁同步电机作为一种高性能、高效率、高可靠性的电机,已经被广泛应用于各种工业设备中。其中,永磁同步模型电流预测控制和广义预测控制技术的引入,更是让其在控制方面得到了很大的提升,使得永磁同步电机的性能更加卓越。本文将围绕永磁同步模型电流预测控制和广义预测控制(速度环)展开,分别从理论和实践两个方面展开深入探讨。
永磁同步模型电流预测控制
永磁同步电机中,电流环是整个控制系统的核心。传统的PID控制方法虽然简单易行,但其在响应速度和稳态性能方面往往表现不佳。因此,本文采用了预测控制双矢量改进算法对电流环进行控制。
预测控制算法是一种基于模型的控制方法,其核心思想是利用模型来预测未来的系统状态,并通过控制输入来实现期望的输出。同时,预测控制算法也可以解决非线性和时变系统的控制问题。
在永磁同步电机中,采用双矢量改进算法进行预测控制。该算法通过对电机转矩和转速进行预测,从而实现对电机电流的控制。在预测控制过程中,需要先对电机的动态特性进行建模,并根据模型对未来状态进行预测。然后,通过比较预测值和实际值之间的误差,调整控制输入来实现期望的状态输出。
此外,为了进一步提高控制效果,本文还采用了对应的学习文献进行调研和实验。通过理论和实验相结合的方式,验证了预测控制双矢量改进算法在永磁同步电机电流环控制中的有效性和可行性。
广义预测控制(速度环)
除了电流环,速度环的控制也是永磁同步电机中非常重要的一部分。传统的速度环控制方法主要基于PID算法,但其响应速度和控制精度往往无法满足实际需求。因此,本文采用了广义预测控制与扩展状态观测器相结合的方法来提高系统鲁棒性和稳态特性。
广义预测控制是一种全面考虑系统动态特性的控制方法,其核心思想是通过预测系统未来状态,从而控制系统达到期望的输出。同时,广义预测控制也可以有效地解决非线性和时变系统的控制问题。
在永磁同步电机中,利用广义预测控制加上扩展状态观测器的方法来控制速度环。在预测控制中,需要建立永磁同步电机的速度模型,并根据模型进行状态预测。同时,通过扩展状态观测器来获得系统未知状态的估计值,并与预测值进行比较,从而实现期望的输出。
实验结果表明,采用广义预测控制与扩展状态观测器相结合的方法,可以显著提高永磁同步电机的控制性能。其不仅具有更好的鲁棒性和稳态特性,而且可以实现更高的精度和速度响应。
总结
永磁同步模型电流预测控制和广义预测控制技术的引入,使得永磁同步电机的控制性能有了显著的提升。本文围绕永磁同步模型电流预测控制和广义预测控制(速度环)展开深入探讨,并通过理论分析和实验验证,证明了这两种控制方法在永磁同步电机中的有效性和可行性。同时,本文还对相关学习文献进行了调研,为实际控制应用提供了更加丰富的理论支撑和实时参考。
相关代码,程序地址:http://lanzouw.top/682828731037.html















 209
209











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









