






笔者发现csdn上几乎没有关于电力电子变流器和永磁同步电机模型预测控制方式实现的文章,所以决定写一写自己的理解。在看本文章之前,建议把具体的模型预测控制基本原理看一遍,可以看我写的这篇文章:
对MPC原理和公式进行通俗解释及MATLAB代码实现_某只旺仔的博客-CSDN博客
一、模型预测控制
1.背景介绍
模型预测控制(Model Predictive Control,MPC)已经经历了大约30年的发展,并被广泛应用于工业过程控制中(例如化学、石油工业),其理论的提出被认为是过程控制中最重要的一大进步。MPC具有众多优点,特别是它能够简单有效地实现多目标优化控制,以及易于加入非线性约束条件,使得其受到许多学者的青睐。在最近10年的发展中,MPC的研究已经延伸至包括电力电子与电力传动在内的多个应用领域,例如轨道牵引技术,汽车动力总成,以及热能管理系统等等。
2. 电路实现
(1)首先从单臂电路分析
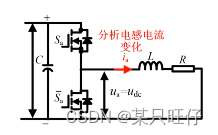
为了避免直流回路短接同时使得电路电流能够正常流通,于是规定和
开关不能同时闭合或关断。我们令
表示上面的开关闭合,下面的开关断开,
表示上面的开关断开,下面的开关闭合。于是,该电路就有两种不同的开关状态。
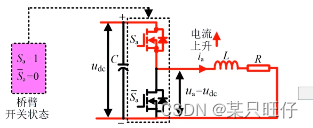
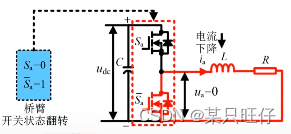
第一种情况下,通过负载的电流上升,输出电压为所加直流电压,第二种情况下,通过负载的电流下降,输出电压为0。通过切换开关状态就可以实现电流对参考值的跟随
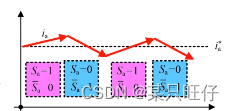
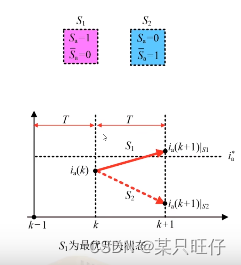
现在我们假设当前时间为k时刻,使用传感器测量得到当前时刻的电流值,并且规定电流的参考值为
,也就是说我们希望实际的电流始终接近电流的参考值。接下来,我们需要知道在k时刻需要开关处于什么状态能够使之后时刻的电流逐渐接近参考值,于是我们预测这两种开关状态在k处施加控制后对电流
造成的影响。
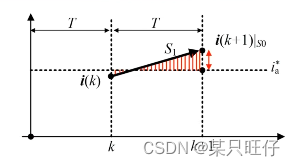
从下图中可以看出,当S1开关状态(即上面开关闭合,下面开关断开)在k时刻作用于系统时,之后的电流状态如图中的红色实线表示,在时刻值达到
,此段时间内电流一直上升,并最终超过参考值;当S2开关状态在k时刻作用于系统时,电流状态如红色虚线表示,在
时刻值达到
,此段时间内电流一直下降。同时我们从图中得出,在k+1时刻S1状态作用的电流值相比于S2作用时离参考值更近,因此我们推断在k时刻我们需要控制开关处于S1状态。
从上例我们可以总结出一个通用的判断每个时刻开关所需处的状态的方法为:
(2)而针对逆变器和永磁同步电机,我们使用常用2L-VSI逆变器拓扑结构进行分析。
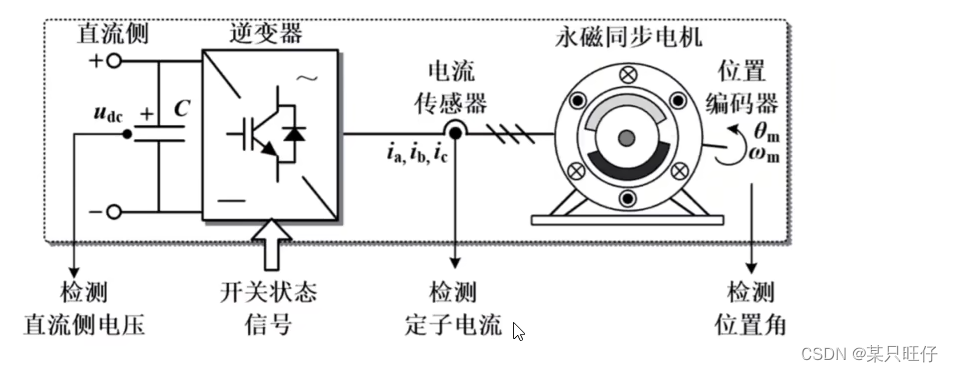
逆变器处细节图:
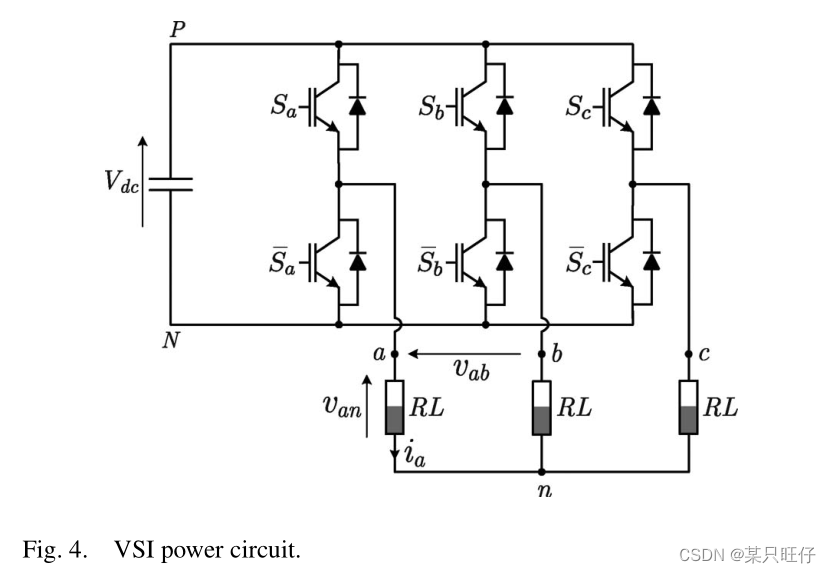
规定该逆变器的同一个桥臂上两个的开关不能同时闭合或断开。因此每一个桥臂有2种开关状态,三个桥臂共有种开关状态。
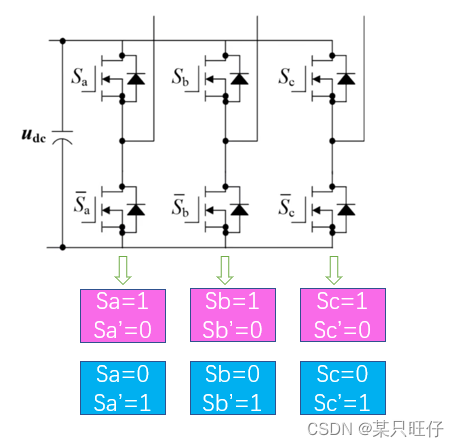
这八种开关状态分别对应八种输出电压矢量,正好构成六边形,不懂的朋友可以看看这个视频:
15. 六个扇区的PWM切换关系表格_哔哩哔哩_bilibili
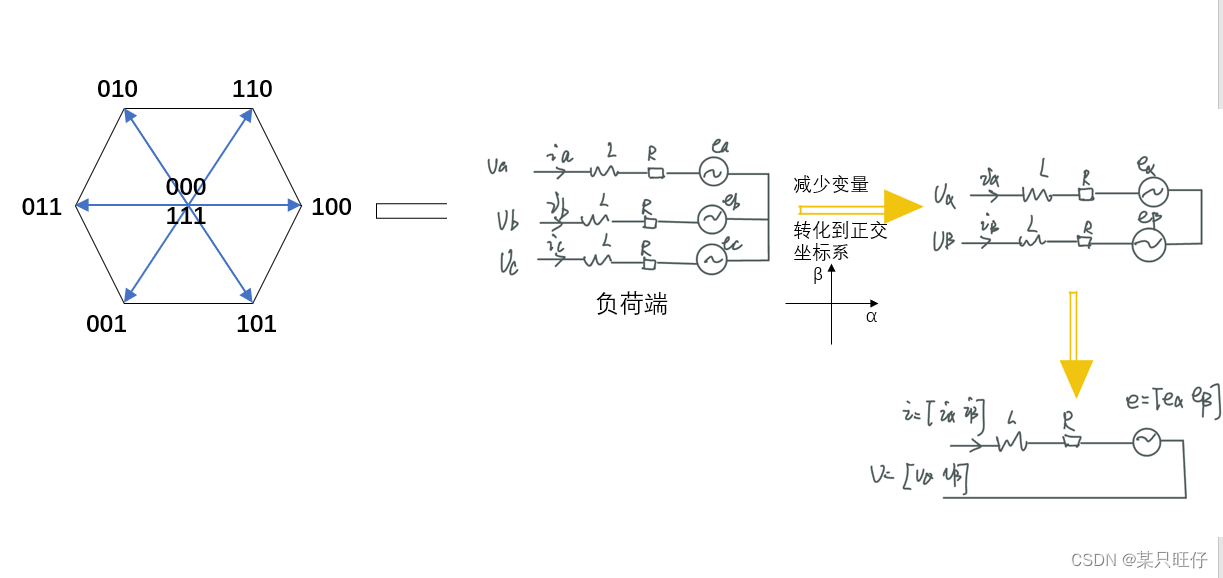 最终我们得到了整合在
最终我们得到了整合在和
轴上表示的相电压值,相电流值,电路上的电感和电阻以及反电动势的电路。于是我们使用其列方程式
将上述方程离散化,即构成了预测方程:
其中,
于是我们为了确定在k时刻的最优开关状态,分别假设开关为上文中的8种的开关状态并预测k+1时刻的电流值如下图所示
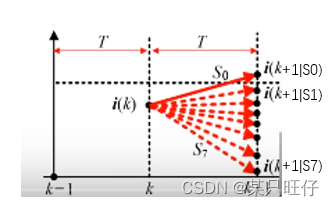
那么我们如何判定哪一种是最优开关状态呢?、
这就引出了代价函数g,我们通过计算参考值与预测值之间的误差(这里的误差为广义的,具体看下面的公式),来找出使得误差也就是代价函数最小的开关状态。
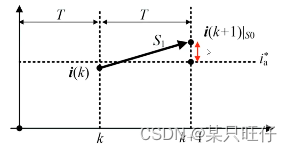
其中一二两种为离散形式代价函数,其中第一种的含义是参考电流值在实轴(α坐标轴)上的分量值与预测电流值在该轴上的分量之差的平方加上参考电流值在虚轴(β坐标轴)上的分量值与预测电流值在该轴上的分量之差的平方,类似于平方欧式距离;第二种的含义是参考电流值在实轴(α坐标轴)上的分量值与预测电流值在该轴上的分量之差加上参考电流值在虚轴(β坐标轴)上的分量值与预测电流值在该轴上的分量之差。而第三种是积分形式,积分面积如上图红色区域表示,积分结果的绝对值越大,说明预测值离参考值偏离程度越大。
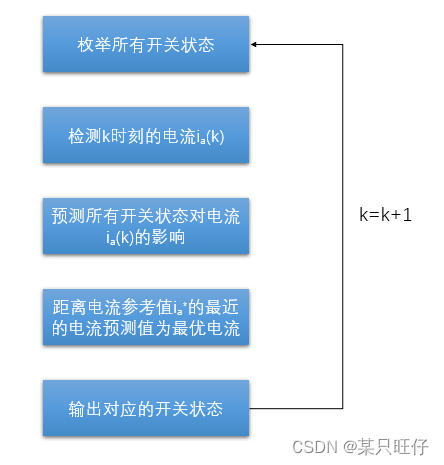
于是,我们将整个预测过程使用框图呈现:
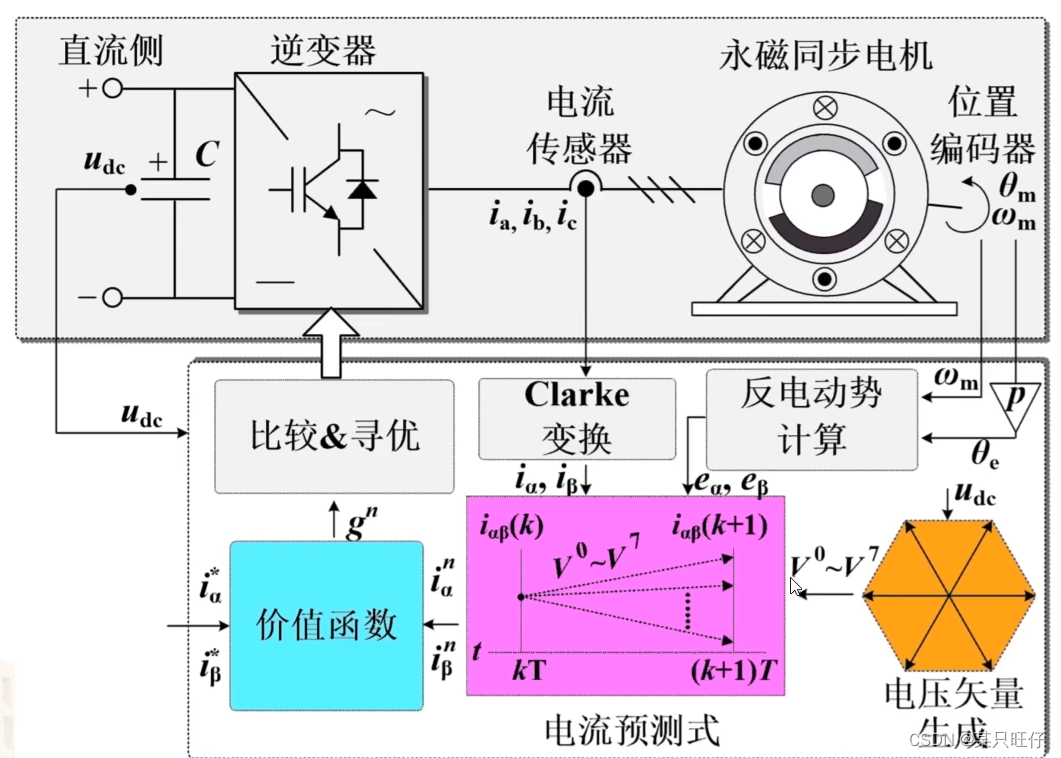
图中有几个关键点:
- 通过电流传感器测得三相相电流
,后经过Clarke变换减少变量得到
- 通过位置编码器测得电机
,利用公式计算得到反电动势
- 将
和
代入下面的预测公式,并代入8种不同的电压矢量
,预测得到8种不同的
- 代入参考值和预测值的电流值,计算代价函数g的函数值,选取使得函数最小化的开关状态作用在当前时刻
未完待续

















 1342
1342

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









