










仿真文件版本:Matlab 2021b
仿真文件链接:本文仿真文件(Simulink 2021b),左侧就是链接,打不开复制在浏览器打开。
仿真文件仅供学习PMSM无传感器控制的同学下载、学习、交流。
基于LESO的PMSM扩展反电动势观测器如下式所示:
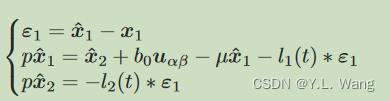
其中:
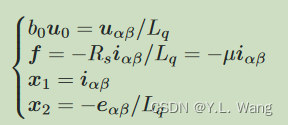
,传统的LESO中L1(t)和L2(t)取常数即可。
部分仿真波形如下图所示:
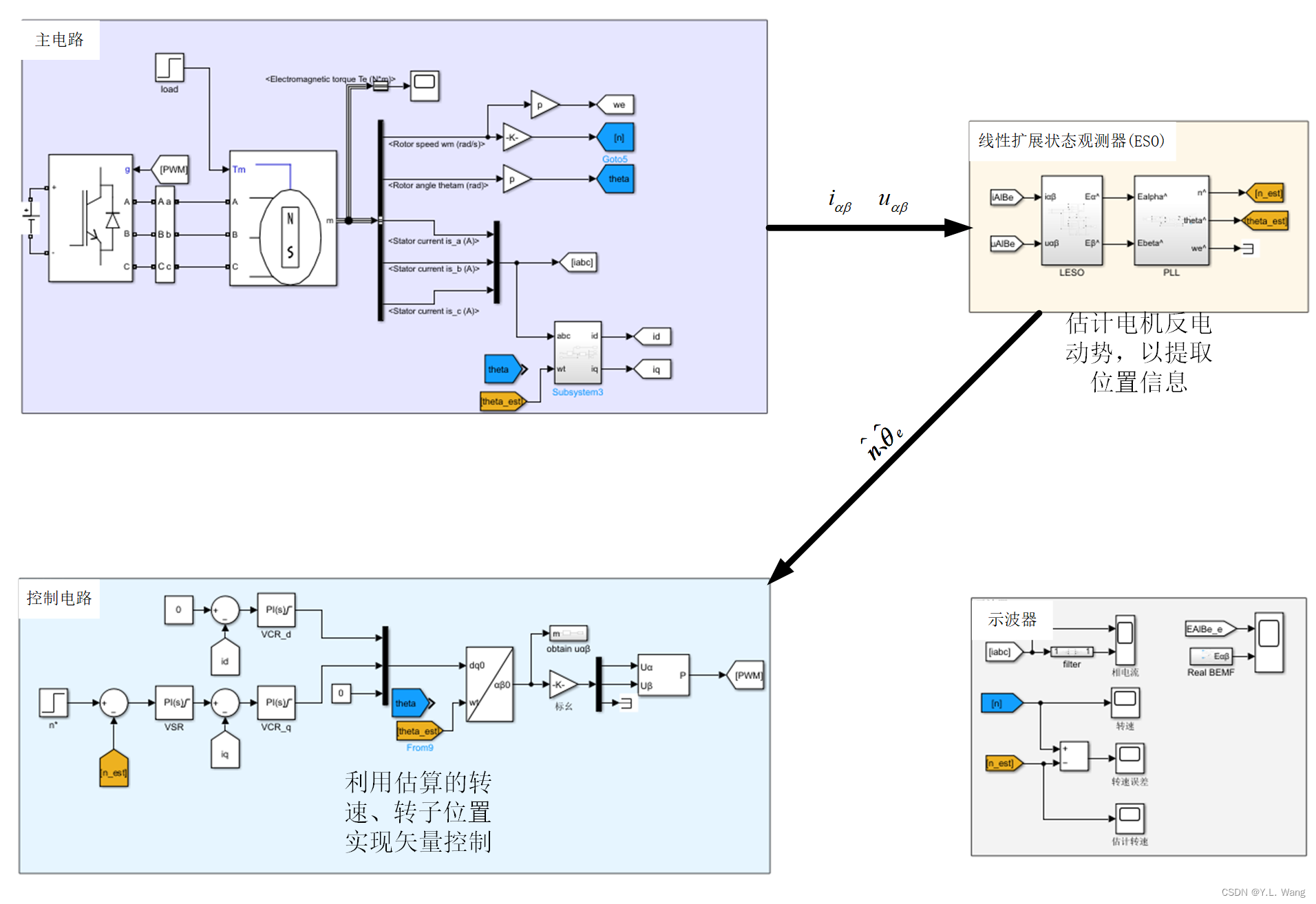
图1是仿真模型的总体结构,由主电路、ESO、控制电路和示波器4部分组成,分别是控制的对象、转子位置观测、FOC算法实现、电机状态显示。
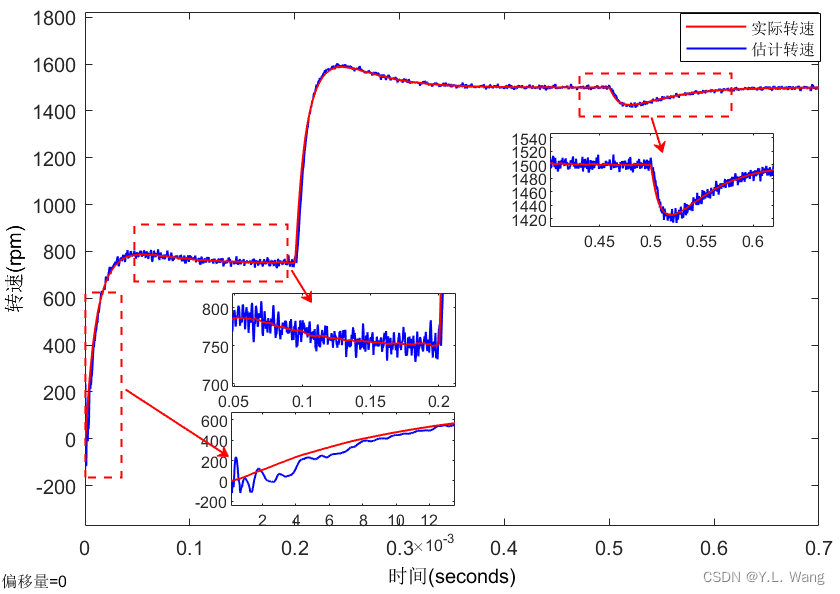
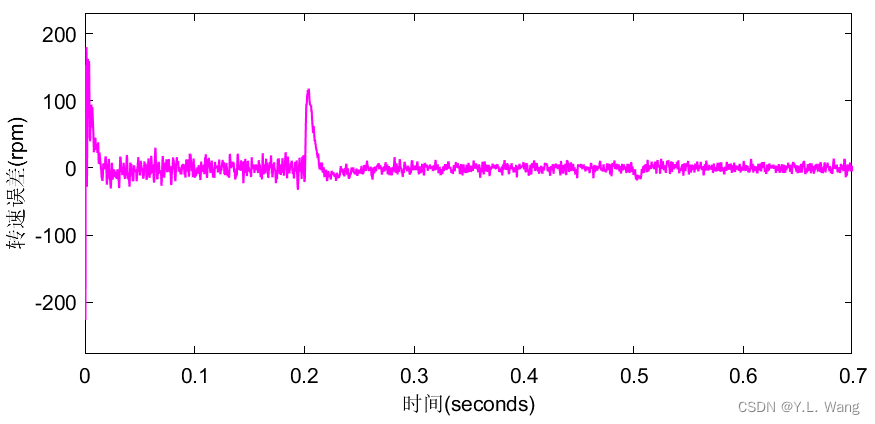
图2是仿真转速波形,其中t=0.5s电机负载突增,可见基于ESO的无传感器控制系统具有良好的动、静态性能。
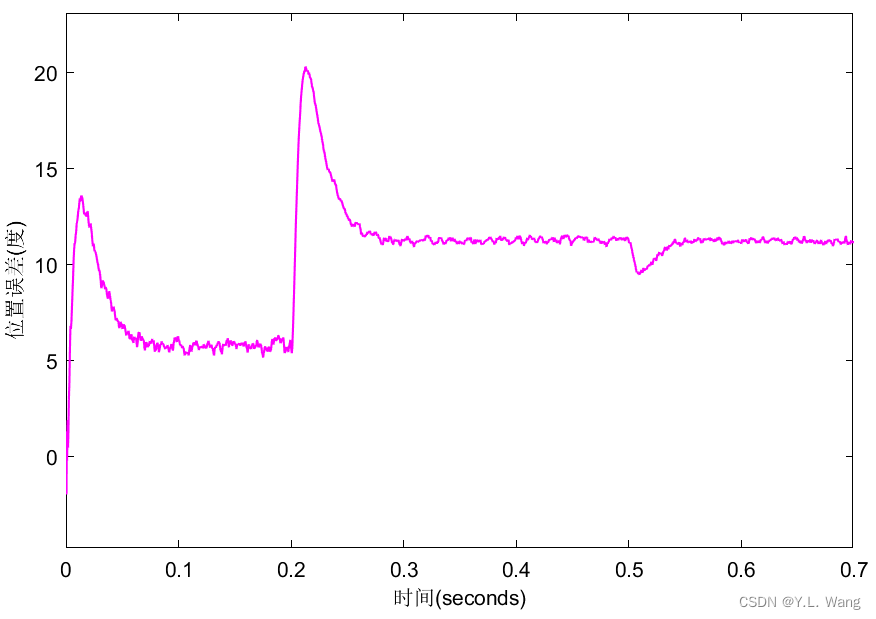
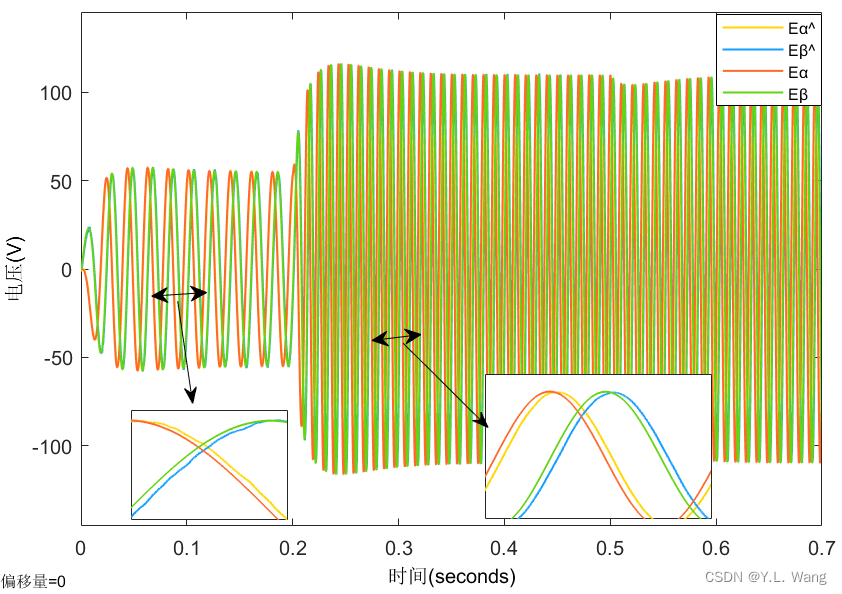
图3、图4是转子速度估计误差和转子位置估计误差,在电机动态过程中,电机位置、速度的估计误差都会很快收敛。其中位置误差是由于基于ESO的反电动势观测器本身等效为一个二阶低通滤波器,因此观测的反电动势相对于实际的反电动势在相位、幅值上面难免存在差异,如图5所示即为观测器观测的反电动势与实际电动势的波形。由图4可知,电机转速越大,转子位置稳态误差越大,这是传统ESO的固有缺点,参考文献【1】提出了自适应的ESO算法FA-ESO,本质上就是根据电机实时转速(电频率)动态调整观测器结构,消除观测的反电动势与实际电动势之间的相位差异。
参考文献:【1】Li Y, Hu Y, Ma X. Sensorless Control of Dual Three-Phase IPMSM Based on Frequency Adaptive Linear Extended State Observer[J/OL]. IEEE Transactions on Power Electronics, 2023, 38(11): 14492-14503. DOI:10.1109/TPEL.2023.3307954.



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











