






双三相PMSM的基本结构
双三相永磁同步电机(PMSM)是目前研究和应用最多的多相电机之一,相较于传统的三相永磁同步电机,双三相永磁同步电机更适合大功率、可靠性要求较高的场合,此外由于双三相永磁同步电机控制自由度更高,控制更加灵活,其种相移30°电角度的双三相PMSM基波电流子平面上的最低次电流谐波提升至11、13次,因此其输出转矩脉动相较于三相永磁同步电机更小。
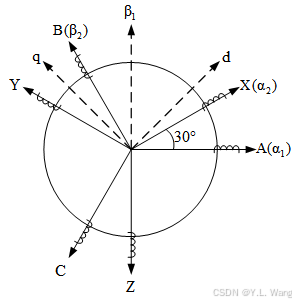
双三相PMSM的定子绕组由两套三相绕组构成,根据这两套三相绕组之间的相移,可以将双三相电机分为对称和不对称两类,其中相移30°电角度且中性点相互隔离的不对称双三相PMSM是最常见的一种双三相PMSM,也是本文的仿真对象。如图1所示为相移30°电角度的双三相PMSM定子绕组结构图,其定子绕组由两套(ABC和XYZ)相移30°电角度的三相绕组构成。得益于这种不对称的结构,相移30°电角度的双三相PMSM实际上是一种半12相电机,其基波电流子平面的最低次谐波为11、13次,谐波电流次数越高,幅值就相对越低,因此转矩脉动更小。
双三相PMSM的矢量控制
双三相PMSM的矢量控制根据使用的坐标变换不同可以分为两类:1、基于VSD(矢量空间解耦)变换的矢量控制;2、基于双d-q变换的矢量控制。
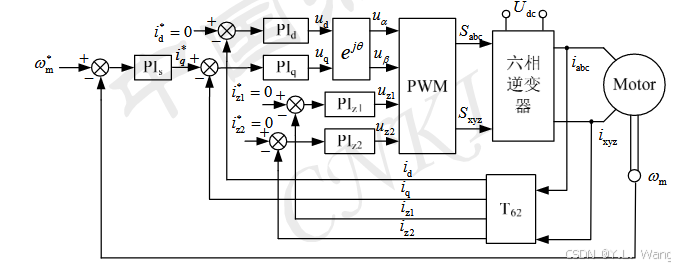
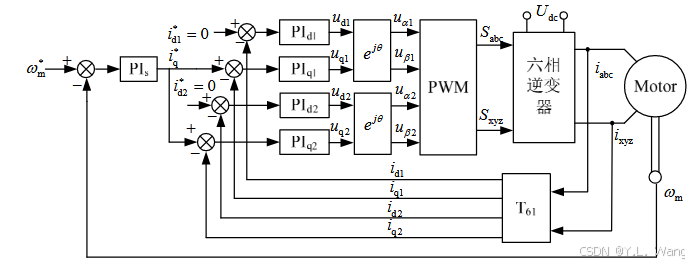
其中基于双d-q变换的矢量控制利用了双三相PMSM定子绕组由两套三相绕组构成的特点,对两套绕组分别作传统的三相PMSM克拉克变换和帕克变换,因而可以直接利用三相PMSM矢量控制策略,更易实现;基于VSD变换的矢量控制,将双三相电机的两套三相绕组看做一个整体,将相坐标系下的互相耦合6相电流变换为3个相互正交(基波电流子平面、谐波电流子平面、零序电流子平面)的电流子平面上,其中只有基波电流子平面参与机电能量的转换。
基于VSD变换矢量控制的双三相PMSM结构框图如图2所示。(《双三相永磁同步电机驱动技术研究》杨金波)
基于双d-q变换矢量控制的双三相PMSM结构框图如图3所示。(《双三相永磁同步电机驱动技术研究》杨金波)
双三相PMSM矢量控制仿真
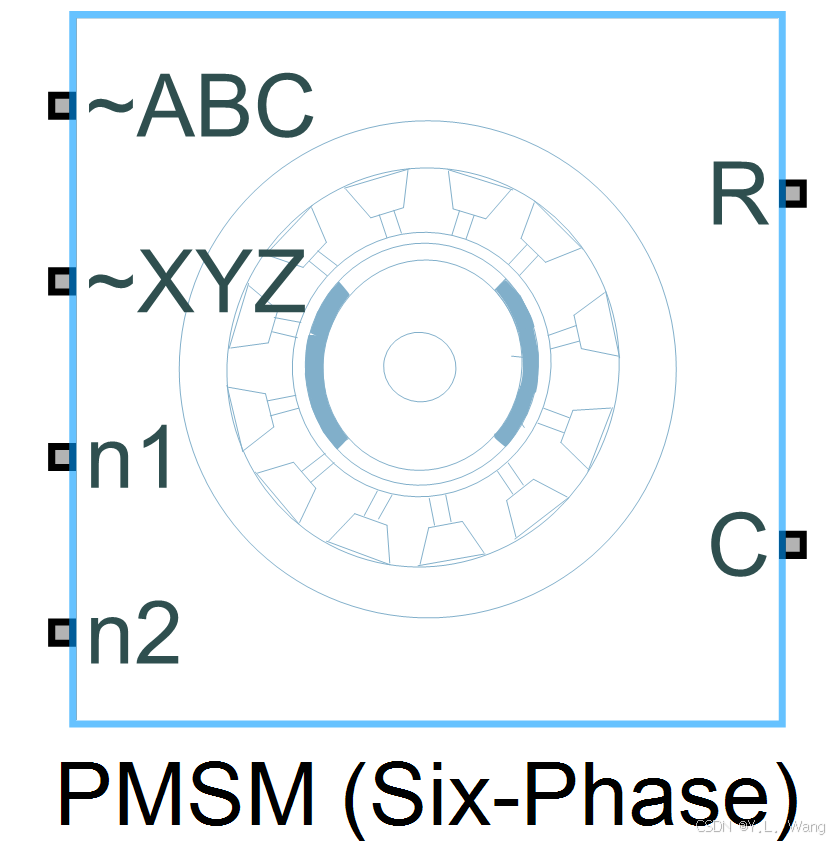
MATLAB/simulink 2021b及更新的版本中已经自带双三相PMSM的仿真模型,不需要自行搭建,如图4所示,模型名字为PMSM(Six Phase)
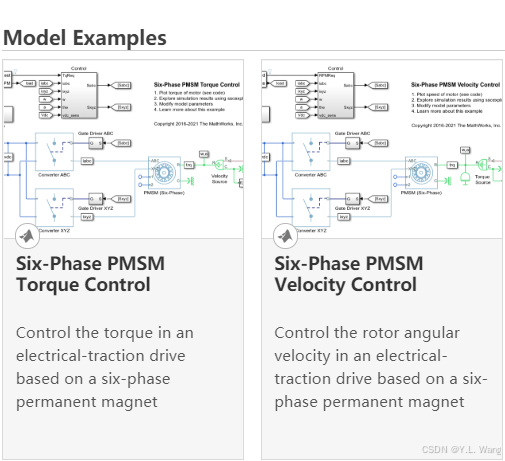
在Simulnk中右键该模型,选择“帮组”,查看模型文档,在文档中官方已经给出了双三相PMSM的仿真例程,分别是直接转矩控制和基于VSD变换的矢量控制,如图5所示,大家可以打开自行学习。
鉴于官方例程中已经有了基于VSD的矢量控制仿真,因此这里只放基于双d-q变换的矢量控制,其控制结构框图如图3所示,仿真框图如图6所示。
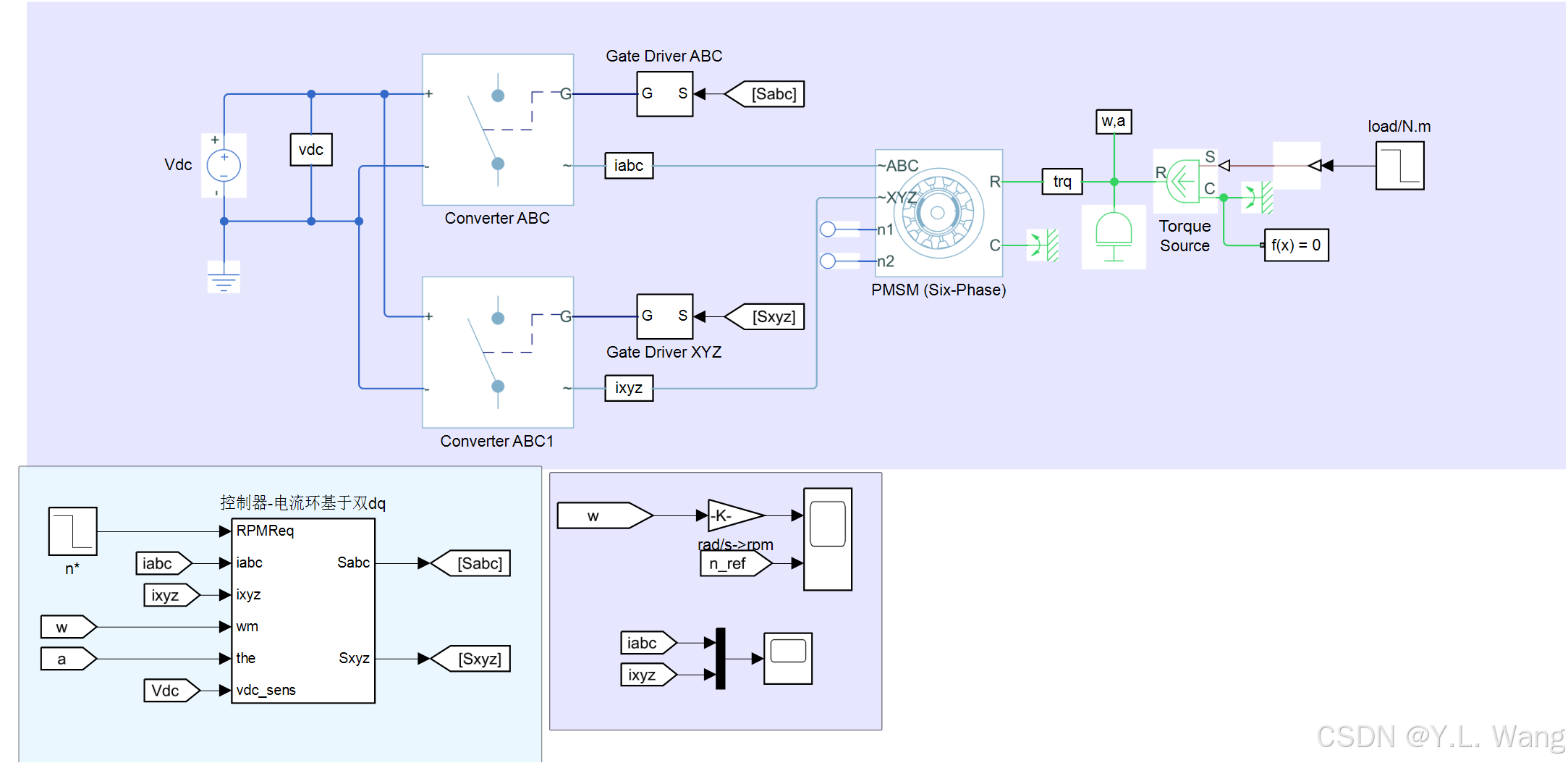
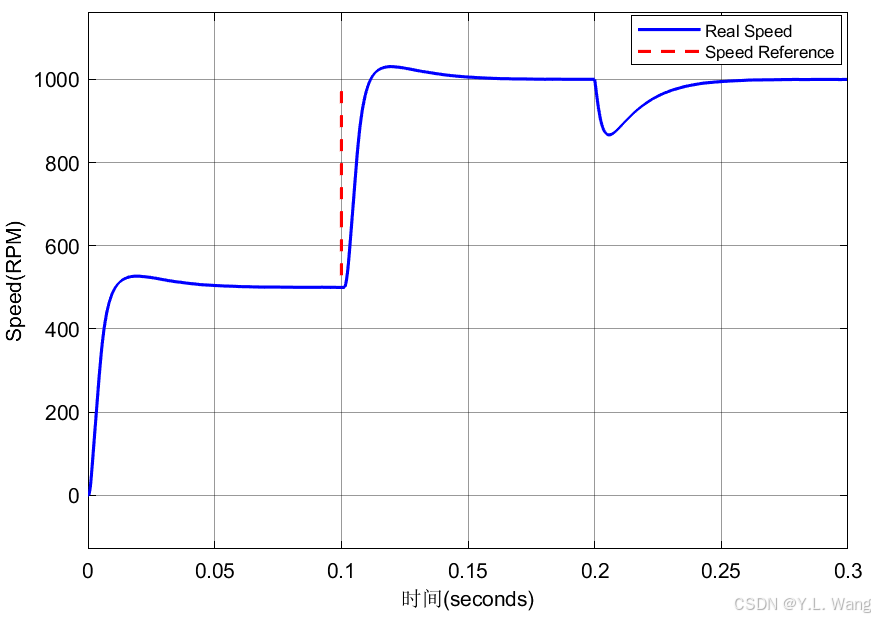
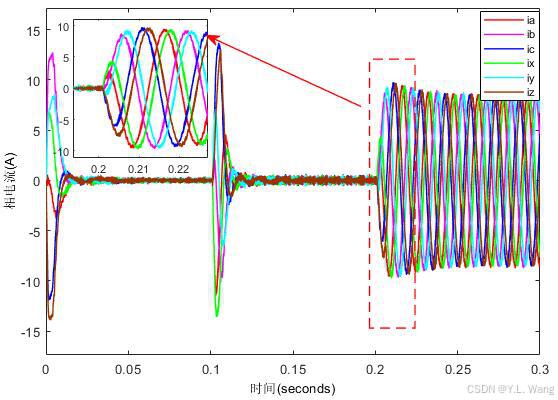
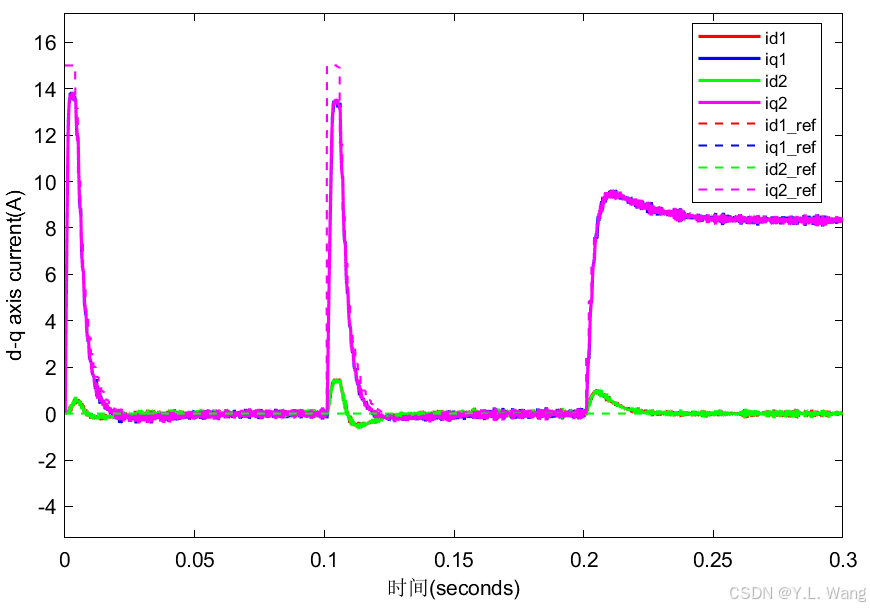
0负载起动,转速在0s设置为500,0.1s设置为1000(额定转速),负载在0.2s设置为10Nm(额定负载),相应的仿真波形如图7、8、9所示。
仿真文件版本:Matlab/Simulink 2021b(低于此版本的matlab打不开)
仿真文件链接:https://pan.baidu.com/s/1ZQfOyM27s-9Uv9dOMPzRfA?pwd=kn1q ![]() https://pan.baidu.com/s/1ZQfOyM27s-9Uv9dOMPzRfA?pwd=kn1q
https://pan.baidu.com/s/1ZQfOyM27s-9Uv9dOMPzRfA?pwd=kn1q
提取码:kn1q


















 2093
2093

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











