







数字图像处理中像素间的一些基本关系,在此做一下简要记录.
先引入几个邻域概念:
(1)位于坐标(x,y)处的像素p有4个水平和垂直的相邻像素,其坐标是
则这组像素称为p的4邻域,使用表示.
(2)p的四个对角相邻像素的坐标是
用表示.
(3) 以上所有的点并称为p的8邻域,用表示.
先设定一个用于定义邻接性的灰度值集合,称为V.
在二值图像中,如果把具有1值的像素归诸于邻接像素,则V={1}.
在灰度图像中,该集合也是相同的概念,只不过V可以含有0~255的任意元素.
举个例子,V={14,37,247,255},说明这些灰度值的像素块可以来判断邻接性.
在接下来介绍时我们以二维图像为例来介绍邻接性.
4邻接
如果q在集合中,则具有V中数值的两个像素p和q是4邻接的.
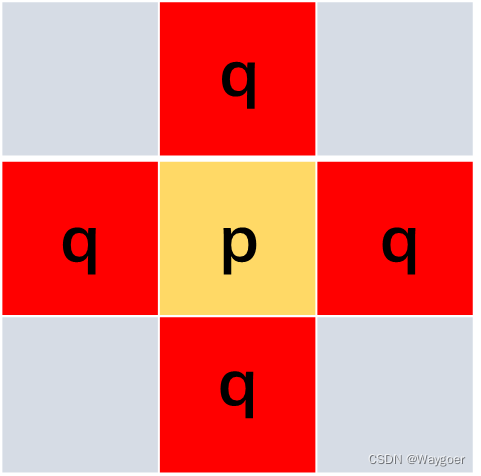
如上图所示,四周的四个红色像素块q均和p是四邻接的.
(特别注意,这是针对二维图像的情况,默认p和q都是1,若是灰度图像,还需要考虑p和q中的数值是否在V中!!! 以下例子都须注意该点,在之后不再重复说明)
8邻接
如果q在集合中,则具有V中数值的两个像素p和q是8邻接的.
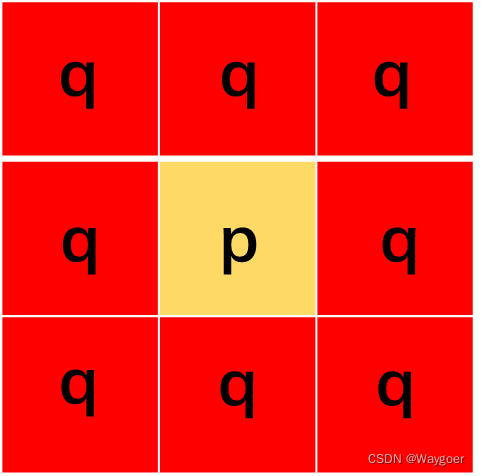
如上图所示,四周的8个红色像素块q均和p是八邻接的.
特殊说明_8邻接的二义性
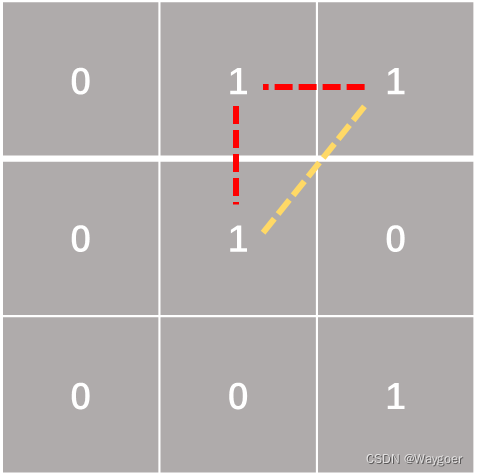
如上图所示,中间的"1"有两条路径(黄色路径&&红色路径)可到达右上角的"1" ,这就称作8邻接的二义性.在边缘检测时不希望出现这种二义性,故引入m邻接来消除采用8邻接时产生的二义性.
m邻接
如果
①q在中
或
②q在中,且集合
中没有来自V中的数值的像素
则具有V中数值的两个像素p和q是m邻接的.
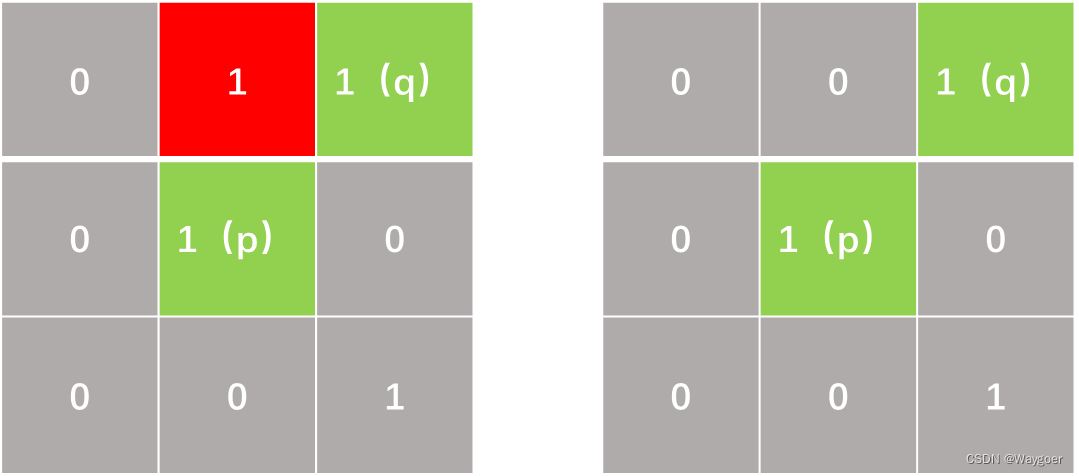
如下左图中p和q就不是m邻接,因为不满足集合中没有来自V中的数值的像素,也就是p和q除了直接连通外还有另一条折线路径可连通.
而如下右图中p和q就是m邻接的.
度量距离
定义:
对于坐标分别为的像素p,q和z,如果
(a) (正定性)
(b) (对称性)
(c) (距离三角不等式)
则是距离函数或度量。
以下介绍几个重点的距离定义——
①欧几里得(欧式)距离
对于欧式距离,距点的距离小于等于某个值
的像素,是中心在
且半径为
的圆平面。
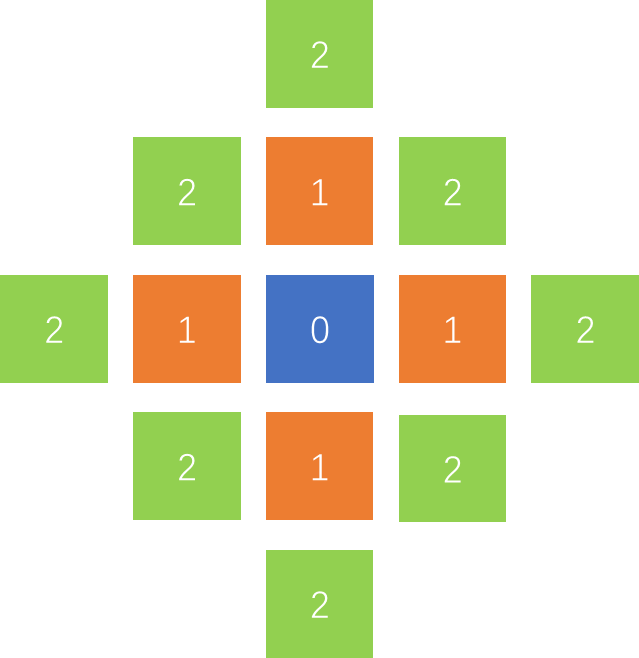
②城市街区距离
对于城市街区距离,距点的距离小于等于某个值
的像素形成一个中心在
的菱形,如下图所示。
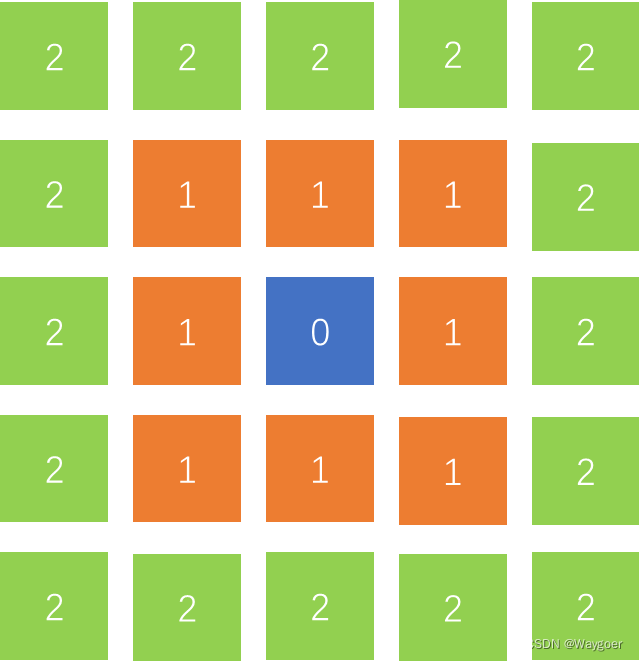
③棋盘距离
对于棋盘距离,距点的距离小于等于某个值
的像素形成一个中心在
的方形,如下图所示。
④m邻接距离
在此举例说明
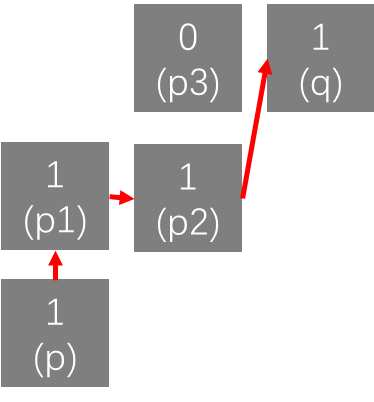
如上图所示,在这种情况下,p和p2就不是m邻接,所以p和q的m邻接距离
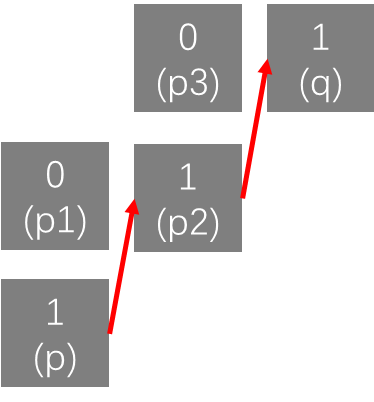
对于上图这种情况,p和p2是m邻接,p2和q也是m邻接,故p和q的m邻接距离















 3436
3436











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









