






非线性悬架,UKF状态估计
软件使用:Matlab/Simulink
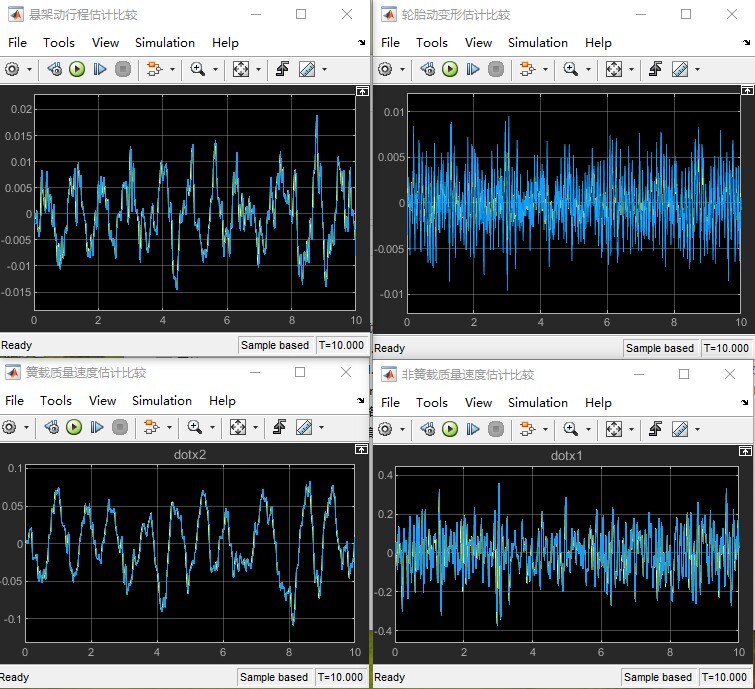
适用场景:采用模块化建模方法,搭建空气悬架模型,UKF状态估计模型,可实现悬架动挠度等状态估计。
包含:simulink源码文件,详细建模说明文档,对应参考资料
YID:75200650052227308
青青猪儿
非线性悬架系统是现代汽车中一个重要的部件,它对车辆的悬挂和操控性能有着关键的影响。在传统的线性悬架系统中,悬挂的运动响应与输入信号之间存在着线性关系。然而,实际的悬挂系统往往是非线性的,这就给悬挂系统的建模和控制带来了很大的挑战。
为了解决非线性悬架系统的建模和状态估计问题,本文基于Matlab Simulink平台提出了一种采用模块化建模方法的解决方案。在该方案中,我们首先利用Simulink搭建了一个空气悬架模型,该模型能够模拟悬架系统的运动响应。然后,我们引入了UKF(Unscented Kalman Filter)算法,通过对悬架系统的状态进行估计,实现了悬架动挠度等状态的准确估计。
具体而言,我们将非线性悬架系统分解为多个子模块,并利用Simulink的模块化建模功能完成了系统的整体建模。首先,我们建立了悬架系统的动力学方程,并考虑了悬架系统的非线性特性。然后,我们利用Simulink中的非线性模块,如非线性弹簧模块和非线性阻尼模块,对系统进行了更加精确的建模。接下来,我们引入了UKF算法,并在Simulink中实现了状态估计模块。通过将悬架系统的测量数据与模型进行比较,UKF算法能够准确地估计悬架系统的状态,如动挠度、加速度等。
在实际应用中,我们可以利用该模型对车辆的悬挂系统进行状态估计。通过测量车辆的加速度和其他传感器数据,我们可以实时地估计车辆的悬挂动挠度,从而对车辆的悬挂系统进行优化和控制。同时,我们还提供了simulink源码文件和详细的建模说明文档,以及对应的参考资料,能够帮助用户更好地理解和使用该模型。
综上所述,本文基于Matlab Simulink平台提出了一种基于模块化建模方法和UKF算法的非线性悬架系统状态估计方案。该方案能够准确地估计悬架系统的状态,并在实际应用中具有很大的潜力。我们相信,通过进一步研究和优化,该方案将为汽车工程师和研究人员提供一种有效的工具,用于悬挂系统的建模和控制。
相关的代码,程序地址如下:http://coupd.cn/650052227308.html
















 3765
3765











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









