







1. 车载异常处理的特殊性
1.1 与传统移动应用的区别
| 维度 | 普通移动应用 | 车载应用 |
|---|---|---|
| 安全等级 | 应用级容错 | 系统级功能安全(ASIL B/D) |
| 响应时效 | 秒级恢复 | 毫秒级响应(如刹车信号丢失) |
| 环境干扰 | 较少考虑EMC/振动 | 必须通过ISO 11452电磁兼容测试 |
| 错误传播 | 单应用崩溃 | 可能引发ECU级联故障 |
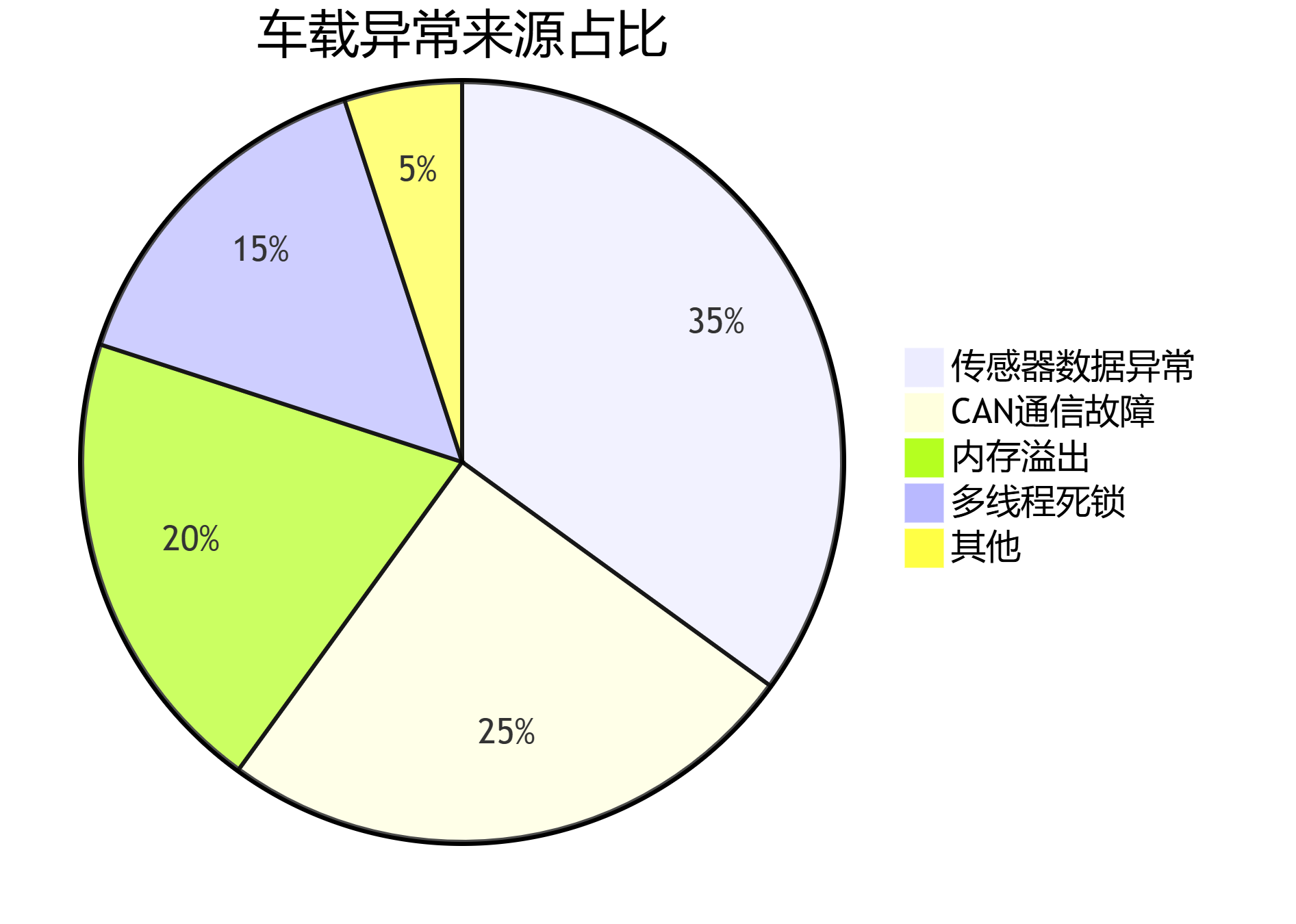
1.2 典型车载异常场景分类
2. 分层防御体系设计
2.1 硬件层防护
-
ECC内存:自动纠正单比特错误,检测双比特错误
-
双MCU冗余:如制动系统采用主从处理器交叉验证
-
电压监控IC:检测3.3V/5V供电异常并触发复位
2.2 系统层机制
(1)Watchdog体系
// 汽车级看门狗配置示例(基于AUTOSAR)
void Wdg_Init(const Wdg_ConfigType* ConfigPtr) {
HW_WDG_TIMEOUT = ConfigPtr->Timeout; // 设置超时阈值(如300ms)
HW_WDG_CFG |= WDG_ENABLE | WDG_IRQ; // 使能看门狗及中断
}
void Wdg_Trigger(void) {
HW_WDG_KICK = 0x55AA; // 喂狗操作
}(2)内存保护单元(MPU)配置
-
关键数据区设为只读(如校准参数)
-
堆栈溢出检测:通过MPU设置guard page
2.3 应用层策略
错误检测技术
| 检测类型 | 实现方式 | 示例场景 |
|---|---|---|
| 心跳检测 | 周期性的线程存活信号 | HMI主线程监控 |
| 校验和验证 | CRC32/CAN报文校验 | 车载网络通信 |
| 输入合理性检查 | 传感器数值范围验证 | 车速信号超范围(>300km/h) |
| 时间监控 | 关键操作超时检测 | 倒车影像启动超时 |
错误恢复策略
分级恢复机制设计:
def handle_error(error_code):
if error_code in (MINOR_ERRORS): # 如UI渲染错误
restart_component()
elif error_code in (MAJOR_ERRORS): # 如CAN通信中断
enter_limp_mode() # 跛行模式
else: # 致命错误(如内存校验失败)
safe_stop_vehicle()3. 典型错误处理案例
3.1 CAN总线异常处理
问题现象:
-
报文ID冲突导致关键信号(如轮速)丢失
-
总线负载率>70%引发随机丢帧
解决方案:
// CAN错误处理伪代码
void Can_RxCallback(uint32_t msgId) {
static uint32_t lastTimestamp[MSG_CNT];
// 检查报文时效性
if(GetTick() - lastTimestamp[msgId] > MAX_DELAY) {
log_error("MSG_%X timeout", msgId);
use_default_value(msgId); // 使用默认值
}
// 检查信号合理性
if(msgId == WHEEL_SPEED_ID && data > 300) {
report_plausibility_error();
data = clip(data, 0, 300);
}
}3.2 多线程资源竞争
典型死锁场景:
-
诊断服务线程持有CAN控制器锁
-
同时请求日志写入锁
-
日志服务线程持有日志锁并等待CAN数据
解决方案:
// 使用AUTOSAR OS的优先级天花板协议
TASK(DiagnosticTask) {
GetResource(CAN_Resource); // 优先级提升至天花板
// 访问CAN控制器
ReleaseResource(CAN_Resource);
}
// 锁获取超时机制
if(pthread_mutex_timedlock(&log_mutex, 100ms) == ETIMEDOUT) {
emergency_log_to_ram(); // 降级到RAM缓存
}4. 高级错误管理技术
4.1 基于机器学习的异常预测
训练数据特征:
-
历史错误发生时的系统指标(CPU负载/内存碎片率)
-
环境传感器数据(温度/振动幅度)
-
时间相关性特征(如连续夜间驾驶后的故障率上升)
部署架构: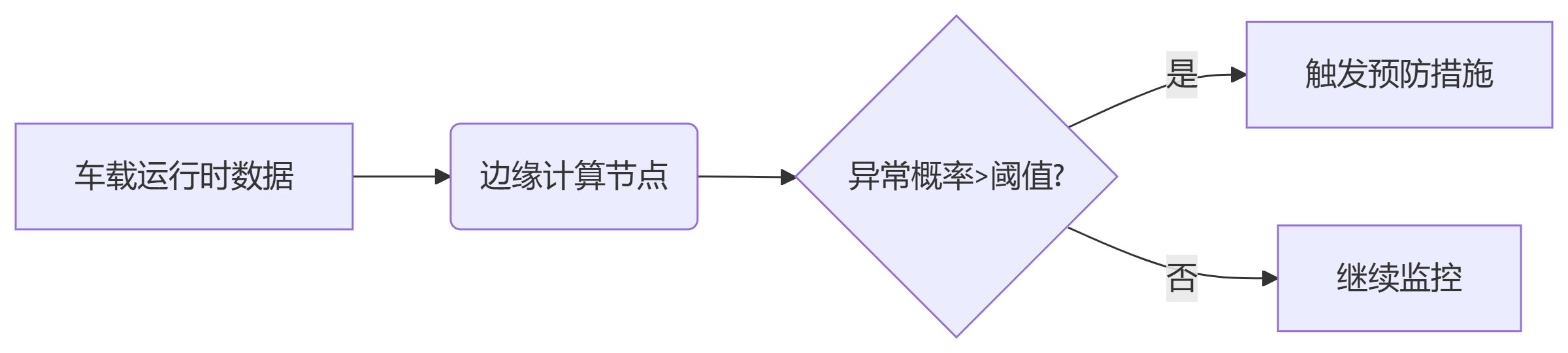
4.2 安全日志系统设计
关键要求:
-
掉电保护:采用MRAM/FRAM存储最后100条日志
-
时间同步:与GNSS时钟同步,误差<1ms
-
安全存储:日志分区加密且只追加写入
日志条目格式:
[2024-03-15T14:23:45.789Z][ERR][CAN] ID=0x123 CRC_ERROR
Context: RPM=3200,Volt=13.4V
Stack: CanDrv_RxISR->CanIf_Receive->Com_MainFunction5. 验证与测试方法
5.1 故障注入测试
常用工具对比:
| 工具 | 注入方式 | 适用场景 |
|---|---|---|
| CANoe | 模拟CAN错误帧 | 网络通信测试 |
| LDRA Testbed | 内存损坏注入 | 单点故障测试 |
| QF-Test | UI异常操作模拟 | HMI健壮性测试 |
5.2 加速寿命测试
测试剖面设计:
-
温度循环:-40°C~85°C,每2小时切换
-
振动谱:模拟8万公里路谱数据压缩至200小时
-
电源扰动:随机12V±5V波动,持续72小时
6. 合规性要求
6.1 ISO 26262相关条款
-
Part6-5.4.7:要求错误处理时间约束(如ASIL D需<50ms)
-
Part9-6.4.3:安全机制的有效性验证要求
-
Part10-7.2:多核系统中的错误传播分析
6.2 ASPICE过程域
-
SYS.3:系统架构中的故障树分析(FTA)
-
SWE.4:软件单元的错误处理代码覆盖率(目标100%)
-
SUP.9:问题管理过程的追溯性
最佳实践总结
-
防御性编程:所有外部输入均需验证(如
assert(speed >= 0 && speed < 300)) -
错误隔离:使用进程/内存域隔离关键组件
-
渐进式降级:定义清晰的降级路径(正常→受限→安全停止)
-
实时监控:关键指标需硬件级采集(如通过PMU监控CPI)
-
可追溯性:每个错误应有唯一ID并关联需求文档
回答建议:
-
结合具体车规要求:"在我们ADAS项目中,对ASIL D功能采用三模冗余设计"
-
展示系统思维:"从传感器数据校验到ECU通信的全链路错误处理方案"
-
强调验证方法:"通过HIL平台注入3000+故障案例验证恢复机制"

















 326
326

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









