






 现场调试发现Lexium23A在Pr模式下JOG停止时伺服电机瞬间停止,有机械冲击,调整参数无改善。通过在速度模式下测试JOG功能,将控制模式设为混合模式08,在M238 PLC中配置相关PDO数据,利用速度模式加减速功能,解决了JOG停止冲击问题。
现场调试发现Lexium23A在Pr模式下JOG停止时伺服电机瞬间停止,有机械冲击,调整参数无改善。通过在速度模式下测试JOG功能,将控制模式设为混合模式08,在M238 PLC中配置相关PDO数据,利用速度模式加减速功能,解决了JOG停止冲击问题。
在现场调试时发现,如果Lexium23A工作在Pr模式下,无论是通过CANopen总线控制软件DI接通(相应DI点设置为JOG运行)还是实际的物理点接通,在JOG停止时,伺服电机会瞬间停止,造成机械冲击,并且在调整P1-34,P1-35,P1-36加减速时间与P1-08位置指令滤波后仍无改善,但如果使伺服进入P4-05参数,按下ENT键之后,显示面板显示-JOG-时,此时通过CANopen总线控制软件DI接通(相应DI点设置为JOG运行)还是实际的物理点接通,停止时均会减速停止。现场设备为直连丝杠,螺距10MM,当运行速度超过200RPM停止时机械冲击明显。
解决过程
现场尝试在速度模式下测试JOG功能,发现JOG停止时有减速过程,因此将控制模式设置为混合模式08,即S-P模式,由一个软件DI点用来切换两者模式。
2.1、首先设置伺服驱动器的DI参数,如下:
P2-10 -- 101 SON
DI1为使能点
P2-11 -- 102 ARST
DI2为故障复位点
P2-12 -- 137 JOGU
DI3为点动正转
P2-13 -- 138 JOGD
DI4为点动反转
P2-14 -- 118 S-Pr
DI5为速度与位置控制切换
P2-15 -- 123 PL
DI6为正向限位
P2-16 – 122 NL
DI7为反向限位
P2-17 -- 124 ORGP
DI8为原点信号
2、在M238 PLC中配置相关PDO数据
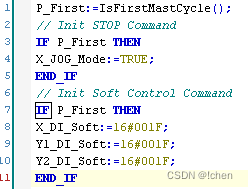
初始化控制模式为Pr模式,并设置DI控制方式为软件控制;
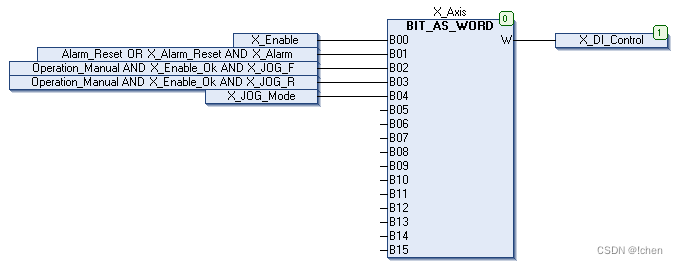
设置一个X_JOG_Mode变量,连接在S-P的软件控制点上;
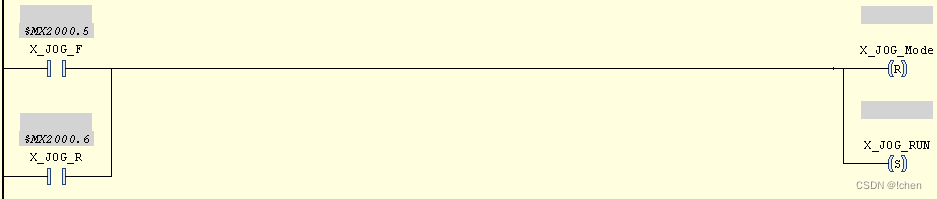
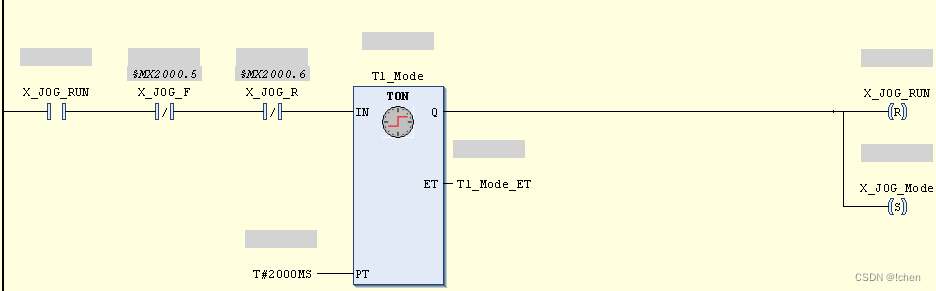
当有JOG启动时,将X_JOG_Mode变量复位,此时为速度模式,JOG启动执行加减速曲线运行,当有JOG停止时,延时一个固定时间(该时间必须大于加减速与S形加减速功能时间之和),再将伺服控制模式切换为Pr模式,运行其他定位指令即可。
3、工作原理
利用速度模式下JOG运行时有加减速功能,JOG时切换至速度模式,定位模式下切换至Pr模式。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











