









 本文介绍了一篇关于中层特征挖掘的研究,通过seeding、expansion、selection三步找到具有鉴别性的场景部分。论文提出的方法在场景分类效果上优于以往的discriminative patch方法,并且训练效率更高。seeding阶段通过图像分割获取初始parts,expansion阶段使用exemplar-SVM迭代学习part detector,selection阶段通过entropy-rank评估鉴别性并选择最优part。最终构建bag of parts模型进行场景分类。
本文介绍了一篇关于中层特征挖掘的研究,通过seeding、expansion、selection三步找到具有鉴别性的场景部分。论文提出的方法在场景分类效果上优于以往的discriminative patch方法,并且训练效率更高。seeding阶段通过图像分割获取初始parts,expansion阶段使用exemplar-SVM迭代学习part detector,selection阶段通过entropy-rank评估鉴别性并选择最优part。最终构建bag of parts模型进行场景分类。
论文:Juneja, M., & Vedaldi, A. (2013). Blocks that Shout: Distinctive Parts for Scene Classification. CVPR.
这是关于中层特征挖掘的论文,文中实验效果比上一篇ECCV 2012 上的discriminative patch 的方法要好,且训练效率高很多。
1. 中层特征挖掘分三个步骤:seeding、expansion、selection
1)
seeding:使用[8]方法对图像进行在4个尺度下进行分割,将分割结果中面积为500-1500像素的区域作为初始parts,且将比较“平坦”的那些parts去掉(根据平均梯度幅度来衡量)。这种方法比随机采样得到的初始parts 要好很多。
2)
expansion:得到初始parts 后,如何学习part detector ? 作者exemplar-SVM 来解决这个问题:首先使用一个part 来学习一个exemplar-SVM,接着去检测更多的part,然后再重新学习exemplar-SVM,依此迭代多次(10次)。作者还采用了LDA[2] 技术来加速这个训练过程。
3)
selection:作者定义的discriminative 是指:在某个类别图像中出现频率高,而在其它类别图像中出现频率低。然而,具有区别性part并不一定只存在于一个类别中。例如,车轮是一个具有区别性的part,它既存在自行车类别中,也存在于摩托车类别中。为了衡量这个鉴别能力。作者提出entropy-rank 来作为衡量指标,它衡量的是某个part 在所有类别中的分布情况。如果某个part 在很多类别中都存在,即鉴别性较差,则熵会比较高;反之,如果仅在少数类别中存在,即鉴别性较高,则熵会比较低。具体定义是,对某个part 的检测器,假设其在训练图片中检测得分最高的r 个block 为(z_i, y_i),z_i 和y_i 分别为第i 个block 的检测得分和所在图片的label。那么将这r 个block 按得分由高到低排列,则前r 个block 的entropy 为:
由此我们可以画出entropy-rank 曲线,如下图所示。
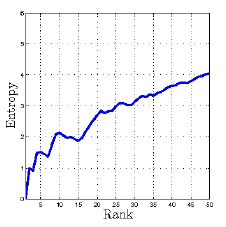
那么,如果曲线以下面积(AUC) 越小,则该part 检测器的鉴别性越好。因此,我们只需选择AUC 最小的若干part 检测器即可。在这个选取过程中,有可能会出现相似的part 检测器同时被选中。作者采用余弦相似性来剔除相似的part 检测器。
2. 得到最有“鉴别性”的若干个part detectors 后,便可像BoW 那样构建bag of parts 模型,后面的分类过程就比较传统了。
Reference:
[1] T. Malisiewicz, A. Gupta, and A. A. Efros. Ensemble of exemplarsvms for object detection and beyond. In Proc. ICCV, 2011.
[2] B. Hariharan, J. Malik, and D. Ramanan. Discriminative decorrelation for clustering and classification. In Proc. ECCV, 2012.
LDA加速
[3] F. Sadeghi and M. F. Tappen. Latent pyramidal regions for recognizing scenes. In Proc. ECCV, 2012.
基于鉴别性场景区域的表示
[4] S. Parizi, J. Oberlin, and P. Felzenszwalb. Reconfigurable models for scene recognition. In Proc. CVPR. CVPR, 2012.
[5] L.-J. Li, H. Su, E. Xing, and L. Fei-Fei. Object bank: A high-level image representation for scene classification&semantic feature sparsification. In Proc. NIPS, 2010.
Object bank
[6] B. Alexe, T. Deselaers, and V. Ferrari. Measuring the objectness of image windows. In PAMI, 2012.
[7] K. E. A. van de Sande, J. R. R. Ujilings, T. Gevers, and A. W. M. Smeulders. Segmentation as selective search for object recognition. In Proc. ICCV, 2011.
[8] P. F. Felzenszwalb and D. P. Huttenlocher. Efficient graph-based image segmentation. IJCV, 59(2), 2004.
[10] M. Gharbi, T. Malisiewicz, S. Paris, and F. Durand. A gaussian approximation of feature space for fast image similarity. Technical Report 2012-032, MIT CSAIL, 2012.















 57
57

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









