







1. 非阻塞并发模型
直接将socket设置为非阻塞, 轮询处理连接和接收。
缺点: 极大消耗CPU资源,不适合实际应用。
2. 信号驱动模型
当Socket文件描述符准备就绪后 内核会给进程发送一个 SIGIO 或 SIGPOLL信号,signal(SIGIO, fun);
实际中 并不只有套接字有输入时才会发出这些信号, 实际情况中并不能用。
3. 超时并发模型
A: 通过套接字选项设置超时
通过套接字选项SO_SNDTIMEO 和 SO_RCVTIMEO设置读写超时,但是只能设置读写超时,不能设置connect 和 accept 等连接超时,并且有的系统不支持。
B: 通过信号SIGALRM 设置超时
#include <comlib.h>
static int nTimeOut = 0;
void OnTimeout(int nSignal)
{
signal(nSignal, SIG_IGN);
nTimeOut = 1;
return;
}
int main(int argc, char *argv[])
{
int nSock = -1, ret;
if (argc != 3) return 1;
nTimeOut = 0;
signal(SIGALRM, OnTimeout);
alarm(10);
ret = ConnectSock(&nSock, atoi(argv[2]), argv[1]);
alarm(0);
signal(SIGALRM, SIG_IGN);
if (nTimeOut == 1) printf("Connect Timeout.\n");
else if (ret == 0) printf("Connect Success.\n");
else printf("Connect Error!\n");
if (nSock != -1) close(nSock);
return 0;
}
C: 通过信号SIGALRM 与 跳转设置超时
#include <comlib.h>
#include <setjmp.h>
static int nTimeOut = 0;
jmp_buf env;
void OnTimeout(int nSignal)
{
signal(nSignal, SIG_IGN);
nTimeOut = 1;
longjmp(env, 1);
return;
}
int main(int argc, char *argv[])
{
int nSock = -1, ret;
if (argc != 3) return 1;
nTimeOut = 0;
setjmp(env);
if (nTimeOut == 1) printf("Connect Timeout.\n");
else
{
signal(SIGALRM, OnTimeout);
alarm(10);
ret = ConnectSock(&nSock, atoi(argv[2]), argv[1]);
alarm(0);
signal(SIGALRM, SIG_IGN);
if (ret == 0) printf("Connect Success.\n");
else printf("Connect Error!\n");
}
if (nSock != -1) close(nSock);
return 0;
}
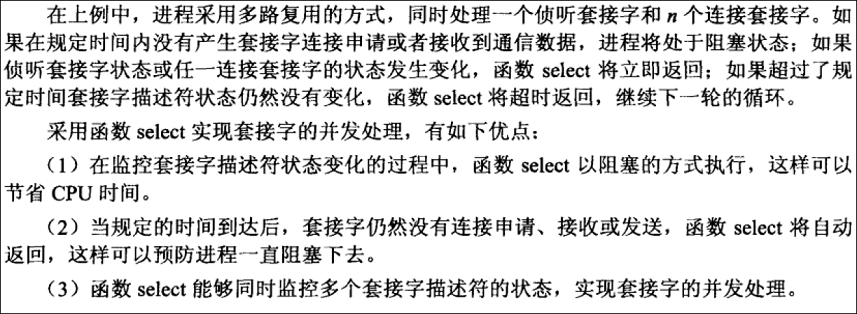
4. 多路复用并发模型

5. 多进程并发模型
A: 不固定进程数的并发模型
比如父进程只执行函数accept等待并完成客户端连接申请,子进程执行函数recv等待客户端的信息发送。
缺陷: 客户端无限申请,服务器比爆。

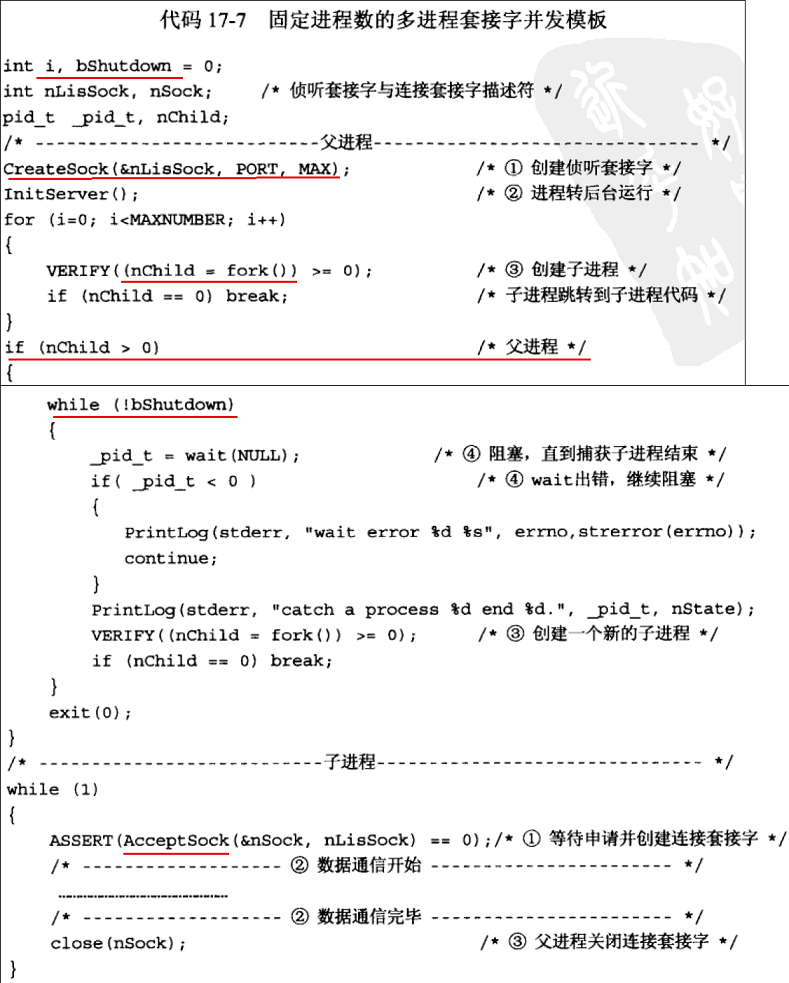
B: 固定进程数的并发模型
服务器父进程在创建监听套接字(listen)后fork子进程, 由子进程等待客户端connect并 完成与客户端的通信交换等工作,父进程之后的功能只是维持子进程的数目不变。
#include<iostream>
#include<string.h>
#include<sys/types.h>
#include<sys/socket.h>
#include<netinet/in.h>
#include<assert.h>
#include<errno.h>
#include<stdio.h>
#include<arpa/inet.h>
#include<stdio.h>
#include<wait.h>
#include<stdlib.h>
#include<semaphore.h>
#include<sys/ipc.h>
using namespace std;
int CreateSock( int *pSock, int nPort, int nMax )
{
int ret, on;
struct sockaddr_in addrin;
struct sockaddr *paddr = (struct sockaddr *) &addrin;
assert(pSock != NULL && nPort >0 && nMax > 0);
memset(&addrin, 0, sizeof(addrin));
addrin.sin_family = AF_INET;
addrin.sin_addr.s_addr = htonl(INADDR_ANY);
addrin.sin_port = htons(nPort);
assert((*pSock = socket(AF_INET, SOCK_STREAM, 0)) > 0);
on=1;
ret = setsockopt( *pSock, SOL_SOCKET, SO_REUSEADDR, &on, sizeof(on) );
if( (bind(*pSock, paddr, sizeof(addrin)))< 0 )
{
perror("bind");
//cout << "bind error" << endl;
return 1;
}
if( (listen(*pSock, nMax)) < 0 )
{
cout << "listen error" << endl;
return 1;
}
else
{
cout << "create cocket successfully" << endl;
return 0;
}
return 1;
}
int AcceptSock(int *pSock, int nSock)
{
struct sockaddr_in addrin;
socklen_t lSize;
assert( pSock!=NULL && nSock>0 );
while(1)
{
lSize = sizeof(addrin);
memset(&addrin, 0, sizeof(addrin));
if( (*pSock = accept(nSock, (struct sockaddr *)&addrin, &lSize)) > 0 )
return 0;
else if( errno == EINTR ) continue;
else assert(0);
}
}
int ConnectSock(int *pSock, int nPort, char* pAddr)
{
struct sockaddr_in addrin;
long lAddr;
int nSock;
assert(pSock!=NULL && nPort>0 && pAddr!=NULL);
assert( (nSock = socket(AF_INET, SOCK_STREAM, 0)) > 0 );
memset(&addrin, 0, sizeof(addrin));
addrin.sin_family = AF_INET;
addrin.sin_addr.s_addr = inet_addr(pAddr);
addrin.sin_port = htons(nPort);
if( (connect(nSock, (struct sockaddr *)&addrin , sizeof(addrin))) == 0 )
{
*pSock = nSock;
return 0;
}
close(nSock);
return 1;
}
int LocateRemoteAddr(int nSock, char *pAddr)
{
struct sockaddr_in addrin;
socklen_t lSize;
if( nSock<=0 && pAddr==NULL )
{
cout << "input error" << endl;
return 1;
}
memset(&addrin, 0, sizeof(addrin));
if( (getpeername(nSock, (struct sockaddr*)&addrin, &lSize)) == 0 )
{
strcpy(pAddr, inet_ntoa(addrin.sin_addr));
return 0;
}
else
{
cout << "getpeername error " << endl;
return 1;
}
return 1;
}
int main()
{
cout << "tcp test!" << endl;
int i, bShutdown = 0, MAXNUMBER = 3;
int nSock, nSock1, nLisSock;
char szAddr[30];
char buf[1024];
pid_t pid, nChild;
sem_t sem; //信号量
sem_init(&sem, 0, 1); //初始化信号量
CreateSock(&nLisSock, 8888, 9);
for( i=0; i<MAXNUMBER; i++ )
{
nChild = fork();
if(nChild == 0) break;
}
if( nChild > 0 ) //父进程
{
cout << "in parent process: " << getpid() << endl;
while( !bShutdown )
{
pid = wait(NULL); //父进程等待子进程结束,并补充子进程
if( pid < 0 )
{
perror("wait");
continue;
}
printf("catch a process %d end \n", pid);
nChild = fork();
if( nChild == 0 ) break;
}
exit(0);
}
else if( nChild == 0 ) //子进程
{
while(1)
{
//cout << "in Child process: " << getpid() << endl;
sem_wait(&sem); //信号量互斥
if( (AcceptSock(&nSock, nLisSock)) == 0 )
cout << "accept successfully" << endl;
memset(buf, 0, sizeof(buf));
recv(nSock, buf, sizeof(buf), 0);
cout << "in process: " << getpid() << " receive: " << buf << endl;
close(nSock);
sem_post(&sem);
}
}
return 0;
}
/*
int main()
{
cout << "tcp test!" << endl;
int nSock, nSock1;
char szAddr[30];
char buf[1024];
CreateSock(&nSock, 8888, 9);
if( (AcceptSock(&nSock1, nSock)) == 0 )
cout << "accept successfully" << endl;
memset(buf, 0, sizeof(buf));
recv(nSock1, buf, sizeof(buf), 0);
cout << "receive: " << buf << endl;
cout << "input a key, send: " << endl;
fgetc(stdin);
send(nSock1, "world", strlen("world"), 0);
cout << "send: " << "world" << endl;
//LocateRemoteAddr(nSock1, szAddr);
//cout << "IP--->" << szAddr << endl;
close(nSock);
close(nSock1);
return 0;
}
*/















 547
547

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









