







声明:
1,本篇为个人对《2012.李航.统计学习方法.pdf》的学习总结,不得用作商用,欢迎转载,但请注明出处(即:本帖地址)。
2,由于本人在学习初始时有很多数学知识都已忘记,所以为了弄懂其中的内容查阅了很多资料,所以里面应该会有引用其他帖子的小部分内容,如果原作者看到可以私信我,我会将您的帖子的地址付到下面。
3,如果有内容错误或不准确欢迎大家指正。
4,如果能帮到你,那真是太好了。
基本概念
惯例性,在刚看到“隐马尔可夫模型”这个名字时我的第一反应是:这什么鬼?于是在看书上的定义时一万个不明白....
所以,为了能清楚的描述“隐马尔可夫模型”,我们还是从例子开始。
例子

如上图所示,有4个盒子,每个盒子里都装有红白两种颜色的球,每个盒子中球的个数见上图。
然后,按照下面的规则抽5次球:
第一次:从4个盒子里等概论随机选取1个盒子,然后从这个盒子里随机抽出1个球,记录其颜色后放回;
剩下4次:
若上一次是从盒子1中抽球,那这次一定是盒子2;
若上一次是盒子2或3,那这次则分别以0.4和0.6的概率选择左边或右边的盒子;
若上一次是盒子4,那这次各以0.5的概率选择是停留在盒子4还是转移到盒子3。
确定转译的盒子后,再从这个盒子里随机抽出一个球,记录其颜色后放回。
就这样,得到一个球的颜色序列:
{红,红,白,白,红}
在这个过程中,观察者只能观测到球颜色的序列,观测不到球是从哪个盒子取出的,即:观测不到盒子的序列。
好了,题目描述完了,下面我们来汇总下上面的信息:
第一步汇总:什么是“隐马尔可夫模型”
1,在这个例子中有两个随机序列:
盒子的序列(之后称之为:状态序列)
球颜色的观测序列(之后称之为:观测序列)
2,状态序列的每个状态值仅取决于前面有限个状态(见上面的“抽5次球的规则描述”),这种状态序列就是马尔可夫链。
3,状态序列是隐藏的,观测序列是可观测的。
于是乎,像这种由一个隐藏的马尔可夫链随机生成的不可观测的状态序列,再由各个状态生成一个观测而产生观测随机序列的过程,就是隐马尔可夫模型。
PS:如果你了解EM算法的话,会发现“状态序列是隐藏的,观测序列是可观测的”这个条件和EM算法面临问题的条件有些像,即,“只知道结果,却不知道每个结果从哪个过程中得出”。于是这里要说一句:“隐马尔科夫模型”只是模型,它不是算法,这个不要弄混了,而可应用到这个模型的算法之一就是EM算法。
第二步汇总:隐马尔可夫模型三要素
由题目知:
1,盒子对应的状态,即状态集合是:
Q= {盒子1,盒子2,盒子3,盒子4}
PS1:这里是状态集合,上面提到是状态序列。
状态集合表述的是“所有可能的状态的集合”;
状态序列表述的是“实际操作中产生的状态序列”
注意不要弄混。
PS2:在定义中,状态集合中的各个元素用qn表示,即:Q = {q1, q2, ..., qN}
2,状态序列因无法观测,所以不可知,但在定义中我们还是给出其表示方法,即:
I= (i1, i2, ..., iT)
3,球颜色对应的观测,即观测集合是:
V= {红,白}
PS1:这里是观测集合,上面提到是观测序列。
观测集合表述的是“所有可能的观测的集合”;
观测序列表述的是“实际操作中产生的观测序列”
注意不要弄混。
PS2:在定义中,观测集合中的各个元素用vn表示,即:V = {v1, v2, ..., vN}
4,观测序列是:
O= {红,红,白,白,红}
在定义中,观测序列中的各个元素用oT表示,即:O = {o1, o2, ..., oT}
5,状态序列和观测序列的长度T=5,这个长度的产生是因为一共进行了5次抽样,然后第一次抽样我们称之为时刻1,第二次称之为时刻2,以此类推。
6,初始概率分布为:
π = (0.25,0.25, 0.25, 0.25)
在定义中,初始概率分布中的各个元素用πi表示,即:π=(πi),其中π=P(i1 = qi), i = 1, 2, ..., N,表示时刻t=1处于状态qi的概率。
7,状态转移概率分布的矩阵为:
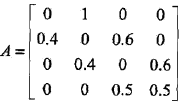
PS:A = [aij]N*N,其中aij= P(it+1 = qj | it = qi), i = 1, 2,..., N; j = 1, 2, ..., N,表示在时刻t处于状态qi条件下,时刻t+1转译到状态qj的概率。如:a12(第一行第二列) = 1,表示:时刻t选择的盒子1(q1)时,时刻t+1选择盒子2(q2)的概率是1。
8,观测概率分布矩阵为:

PS:B = [bj(k)]N*N,其中,bj(k)= P(ot+1 = vk | it = qj), k = 1, 2,..., M; j = 1, 2, ..., N,表示在时刻t处于状态qj的条件下生成观测vk的概率。如B2(1) = 0.3,表示:时刻t处于状态盒子2(q2)时选择红球(v1)的的概率是0.3。
有没有发现,由初始状态项链π、状态转移概率矩阵A和观测概率矩阵B就可以得出所有的可能情况,即:
状态转移概率矩阵A与初始状态概率向量π确定了隐藏的马尔科夫链,生成不可观测的状态序列;
观测概率矩阵B确定了如何从状态生成观测,与状态序列综合确定了如何产生概率序列。
于是,综上所述。
隐马尔可夫模型是由初始状态项链π、状态转移概率矩阵A和观测概率矩阵B决定。π和A决定状态序列,B决定观测序列。
因此A、B和π就是隐马尔可夫模型的三要素,而隐马尔可夫模型λ就可以用如下三元符号表示,即
λ = (A, B,π)
下面汇总定义。
定义
马尔科夫链是一种状态序列,这种状态序列的每个状态值仅取决于前面有限个状态。
隐马尔可夫模型描述由一个隐藏的马尔可夫链随机生成的不可观测的状态序列,再由各个状态生成一个观测而产生观测随机序列的过程。
隐马尔可夫模型λ就可以用如下三元符号表示,即
λ = (A, B,π)
A,B,π是隐马尔可夫模型的三要素。
PS:A, B,π等的含义这里就不再重复了,若有遗忘就看看上面的例子
观测序列的生成过程
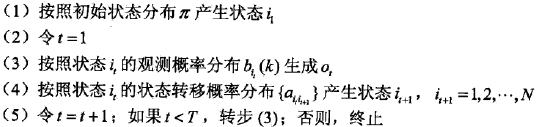
根据隐马尔可夫模型的定义,可以将一个长度为T的观测序列O = (o1, o2, ..., oT)的生成过程描述如下:
算法(观测序列的生成)
输入:隐马尔可夫模型λ =(A, B,π),观测序列长度T;
输出:观测序列 O =(o1, o2, ..., oT)。
过程:
三个基本问题
隐马尔可夫模型有3个基本问题:
1,概率计算问题。
给定模型λ= (A, B,π)和观测序列 O =(o1, o2, ..., oT),计算模型λ下观测序列O出现的概率P(O|λ)。
2,学习问题。
一直观测序列O =(o1, o2, ..., oT),估计模型λ= (A, B,π)的参数,使得在该模型下观测序列概率P(O|λ)最大。即,用极大似然估计的方法估计参数。
3,预测问题,也称为解码(decoding)问题。
已知模型λ= (A, B,π)和观测序列O = (o1,o2, ..., oT),求给定观测序列条件P(O|λ)最大的状态序列I = (i1, i2, ..., iT)。即,给定观测序列,求最优可能的对应的状态序列。
这三个问题我会在“隐马尔可夫模型(HMM) - 2”、“隐马尔可夫模型(HMM) - 3”和“隐马尔可夫模型(HMM) - 4”中分别讲解。














 3360
3360











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









