









星型结构的动态规划
其中,
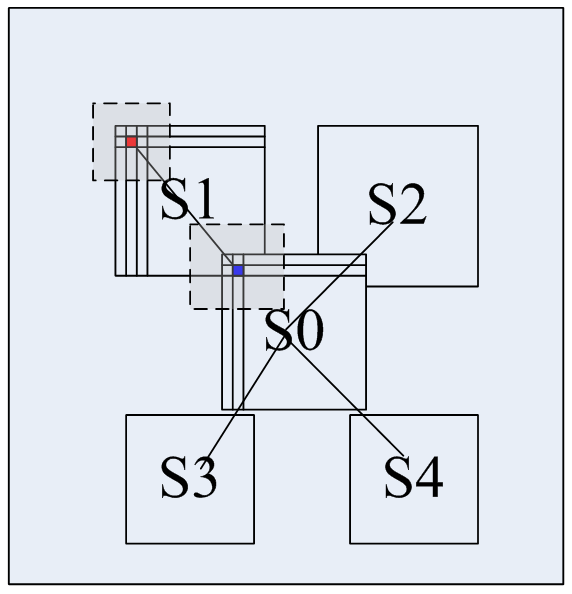
S0,S1,S2,S3,S4
分别是
cen,lel,rer,ml,mr
,(即中心,左眼眼角,右眼眼角和嘴左角,嘴右脚)是搜索空间。
红色的点和蓝色的点之间的连线称之为:
spring
,其外围的虚线边框是该特征点对应的
patch
.
动态规划问题:
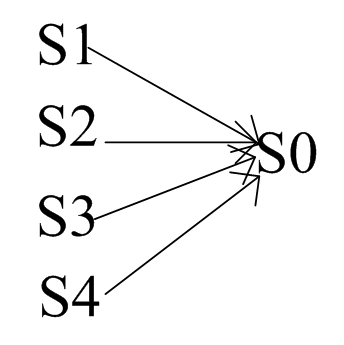
注:下面
S0−S4
即表示搜索空间,又表示阶段。采用混合术语。
1阶段
这里从
S0,S1,S2,S3,S4
可以看作1-5阶段。
2状态
第一个阶段S0的状态变量,即
cener
,或用
s0
表示,其状态变量的集合即为搜索空间,图中S0所标注的矩形区域。
3决策
状态变量
lel
取值为红色的位置时,其下一个阶段,可以选择蓝色的位置,或者蓝色的前一个位置。这表示决策。描述决策的变量称为决策变量。如从第二个S1阶段到第一个阶段S0决策的例子:
u1(lel=′红色位置′)
,可以看作是一个决策变量,其取值是整个S0区域。
编程时,通常定义一个决策数组,用来跟踪状态的变化,用来寻找达到最优时的最优策略。
4策略
各决策阶段组成的序列就是策略。我们的目的是根据一个”评价函数+准则”,找到最优的策略。
5状态转移方程
其描述了上一个阶段的状态
sk
和下一个阶段的状态
sk+1
,以及决策
uk
的关系,如上为:
6指标函数
即评价函数。即我们希望找到的5个landmarks满足,所有特征点的纹理匹配代价和形变代价最大。
纹理代价:
我们可以提取hog,sift,sparse_LBP,LBF等特征。在评价函数一般确认的情况下,纹理特征的描述和提取对于landmarks的定位很重要。学过模板匹配的都知道,当检测的区域的纹理特征和模板表示的特征相同时,可以达到最大的响应。
形变代价:
常用的代价是两个特征点之间的位移矢量的二次函数,则两个特征点之间的形变代价为:。
其中 a,b,c,d 是在训练时,需要学习的模型参数。
在模型的学习过程中,我们只要约束二次函数的二次项的系数全负,我们就可以利用广义距离变换加速动态规划的求解。
辅助理解:
文献1中,公式(3)
其中 m 表示component 或者viewPoint或者mixture,即视角
上述公式转换为公式(4):
其中 (μ,Λ) 是形状参数 (a,b,c,d) 重新参数化的表示。其类似于一个高斯分布。其中 Λm 是一个sparse precision matrix,即其中的非0项对应于 Em 中相连的两个部分 i,j 。[34]给出,当二次函数的 a,c 两个系数是负的时,矩阵 Λm 是正定的。 μm 可以看作是理想的形状。 Λm 小的特征值对应的特征向量表示带有小惩罚的“形变模式 deformation mode”。
个人理解:当 Λm 正定时,则:
同时公式(2)对于二次是一个抛物面,开口向下的抛物面。其正迎合了广义距离变换的求解。
评价函数:
我们希望评价函数值越大越好,对于纹理,越匹配,则 App(L) 值越大。对于 Shape(L) 也是约匹配的时候越大。(下图,抛物线画的不标准,广义距离变换在求解时,需要两个抛物线的交点只有一个。我们将形变和广义距离变换画在同一个图上了,其中 L 表示当前形状,
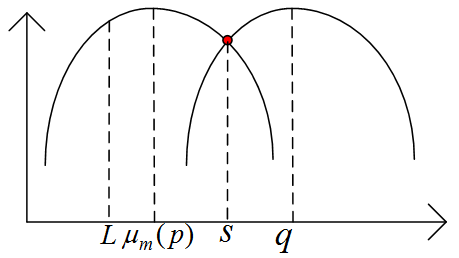
1.欧式距离的广义距离变换:
给定
这里, (x,y)和(x′,y′)在同样的网格上。
和多元函数求解积分类似,由于公式(5)中的第一项不含有 y′ ,那么我们可以对公式(5),先对 y′ 最小化,或者先对 x′ 最小化:
先对 y′ :
先对 x′ :
说明:例如上式,先对将 x′ 看成常数,对 y′ 进行最小化、
2.任意二次形变函数的广义距离变换:
公式(3)中,我们针对某两个相邻的landmarks,如果从
Vi→Vj
,我们称
Vi
为孩子,
Vj
为父亲,进行动态规划求解,即形如公式(2)那样:
其中 f(xi,yi) 表示孩子基准点匹配的纹理代价, f((xi,yi),(xj,yj)) 表示两个基准点之间的形变代价。
同理,我们也可以转换为一维广义距离变换:
即:
其实现过程中,只需要修改交叉点
s
的计算,以及
在图1中的 S1→S0 的动态规划的计算,可以将搜索区域 S1和S0 都映射到从1(for matlab)或者从0(for C)开始的位置,即通过减去各搜索区域的左上角位置。然后直接利用文献2中的一维广义距离变换求解。
算法复杂度的分析:
常规遍历算法的时间复杂度:
针对图1中
S1和S0
,我们假设S1区域大小为
h1×w1
,S0的搜索区域为
h0×w0
,则外循环次数为
h0×w0
,内循环次数为
h1×w1
,则
时间复杂度为:
广义距离变换的时间复杂度:
1.计算下包络(lower envelope或上包络)时间复杂度为:
h1×w1
2.填充值(查找表)时间复杂度为:
h0×w0
故总的时间复杂度为:
参考文献:
1、Face Detection, Pose Estimation, and Landmark Localization in the Wild
2、Distance Transforms of Sampled Functions(广义距离变换)















 2649
2649

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









