









 本文探讨了数学中比例的表示方式,如何通过面积和体积来表达比例关系。通过实例解释了从点到线再到面的抽象过程,揭示了在忽略细节后,比例可以转化为直观的几何尺寸比较。
本文探讨了数学中比例的表示方式,如何通过面积和体积来表达比例关系。通过实例解释了从点到线再到面的抽象过程,揭示了在忽略细节后,比例可以转化为直观的几何尺寸比较。
上次交流米老师留下了一个思考给我们,比例为什么可以用面积表示,体积表示,通过自己查博客,和同学沟通,发现这是数学上一个惯用的思维方式,就是忽略:
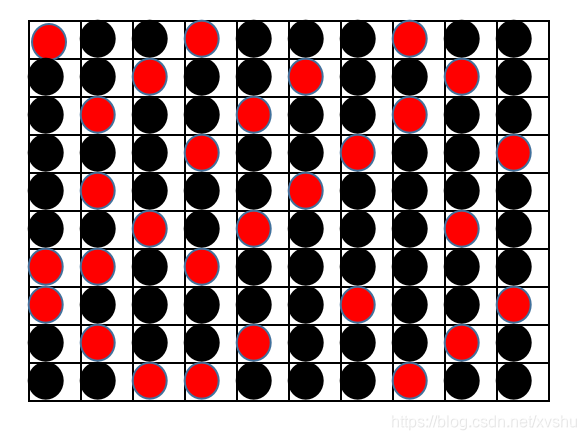
我们先看一组球,一共100个,其中30个红球,70个黑球,均匀分布在一个平面上:
类似如此:
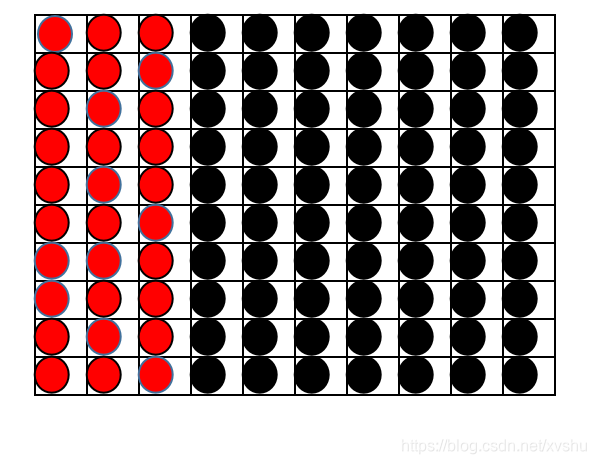
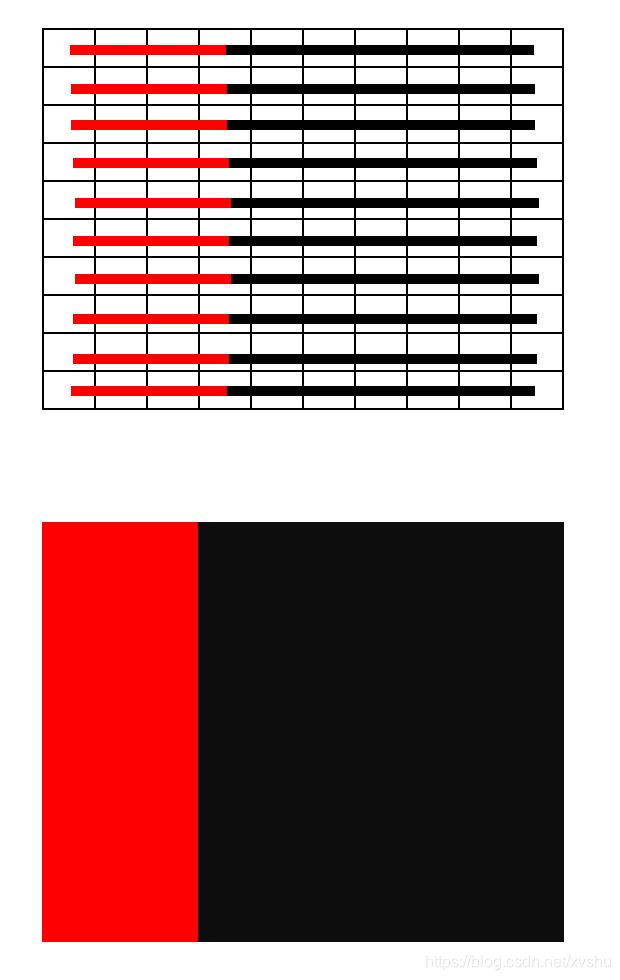
我们研究的是红球白球的比例,那么我们忽略球排布的方位,将红球放在一起,黑球放在一起,排列成这样:
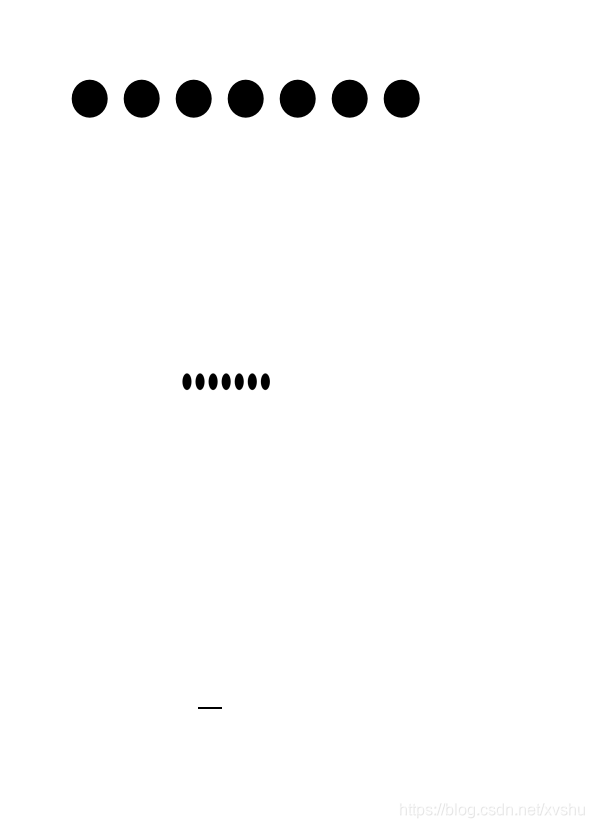
我们在数学中,有个概念,点组成线,线组成面,具体是怎么组成的呢
一些独立的点,连城一个固定的形状,如果我们一直后退,在某个时刻,我们是不是就以为这些点就是条线了,本来是独立的点,点之间有间隙,在我们可接受的范围内,就忽略了点之间的间隙,就成为成为了线:
这个道理推广开:
我们先把横向的点,忽略间隙,抽象成了线:
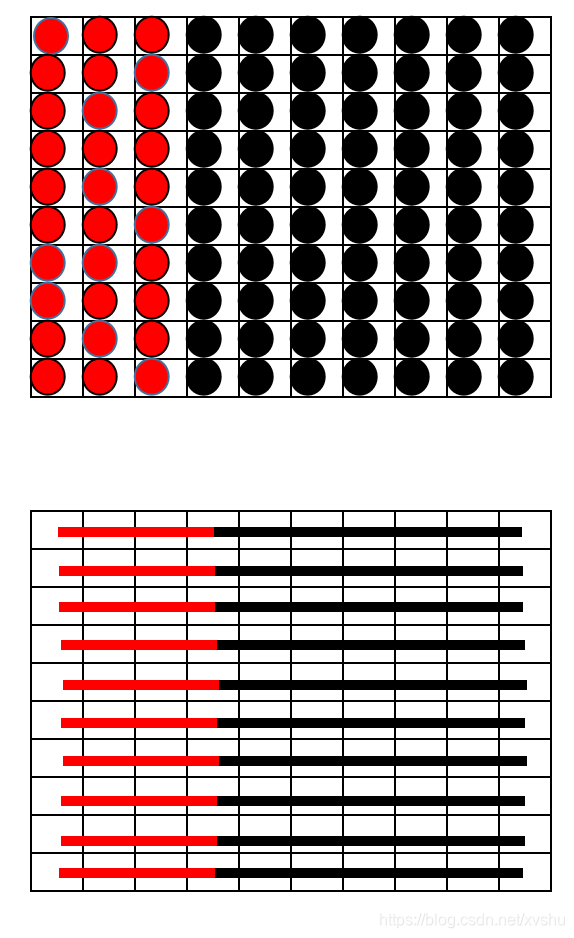
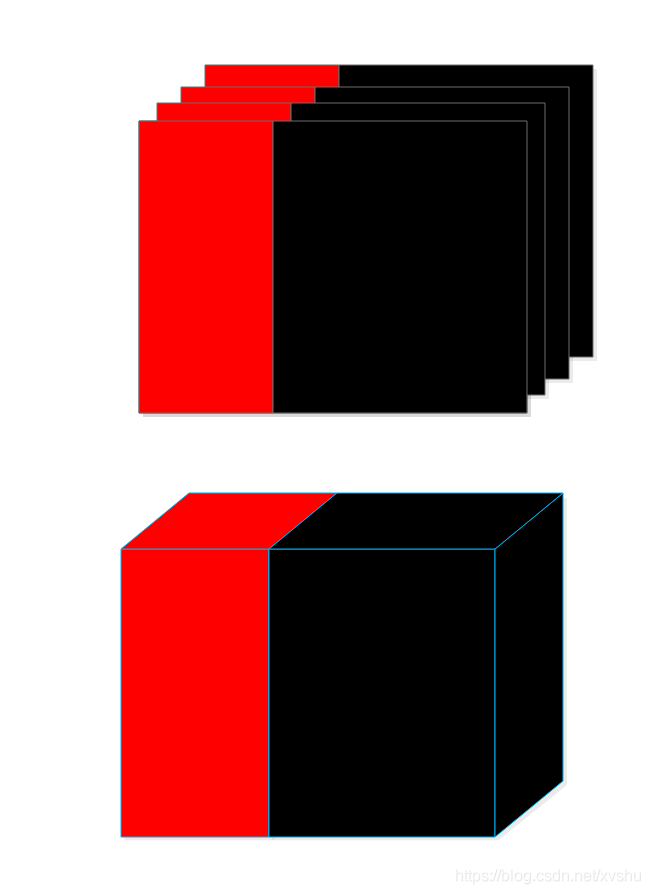
然后再把纵向上的线的间隙,忽略,抽象成了面:
映射到体积也是一样的,这里就不一一列举了,所以,一个比值是可以映射成线段长度,面积大小等直观去看的,因为,抽象成数字之间的比值的时候,就已经忽略了所有的不同,仅仅是两个东西,在你认为合适的可接受的维度进行的一个多少比较。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









