






1. 什么是模板匹配?
模板匹配是一种用于在源图像S中寻找定位给定目标图像T(即模板图像)的技术。其原理很简单,就是通过一些相似度准则来衡量两个图像块之间的相似度Similarity(S,T)。
. 模板匹配方法的优缺点:
优点:简单、直接
缺点:不具有旋转不变性、不具有尺度不变性
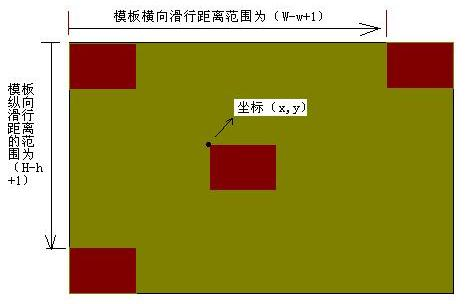
首先,参看上图。假设褐色的大图为待测图片,红色小图为模板图片。
模板匹配的工作方式
模板匹配的工作方式跟直方图的反向投影基本一样,大致过程是这样的:通过在输入图像上滑动图像块对实际的图像块和输入图像进行匹配。
假设我们有一张100x100的输入图像,有一张10x10的模板图像,查找的过程是这样的:
(1)从输入图像的左上角(0,0)开始,切割一块(0,0)至(10,10)的临时图像;
(2)用临时图像和模板图像进行对比,对比结果记为c;
(3)对比结果c,就是结果图像(0,0)处的像素值;
(4)切割输入图像从(0,1)至(10,11)的临时图像,对比,并记录到结果图像;
(5)重复(1)~(4)步直到输入图像的右下角。
大家可以看到,直方图反向投影对比的是直方图,而模板匹配对比的是图像的像素值;模板匹配比直方图反向投影速度要快一些,但是我个人认为直方图反向投影的鲁棒性会更好。
备注: 滑动的意思是图像块一次移动一个像素(从左往右,从上往下). 在每一个位置, 都进行一次度量计算来表明它是 “好” 或 “坏” 地与那个位置匹配 (或者说块图像和原图像的特定区域有多么相似).
C++: void matchTemplate(InputArray image,InputArray templ, OutputArray result, int method)
image: 搜索对象图像 It must be 8-bit or 32-bit floating-point.
templ:模板图像,小于image,并且和image有相同的数据类型
result:比较结果必须是单通单32位浮点数
method:比较算法总共有六种如下所示
method=CV_TM_SQDIFF_NORMED
method=CV_TM_CCORR_NORMED
1)Square difference matching method (method = CV_TM_SQDIFF) 平方差
![]()
2)Correlation matching methods (method = CV_TM_CCORR) 互相关

3)Correlation coefficient matching methods (method = CV_TM_CCOEFF) 相关系数


4)上述三种方法的归一化形式(目的是为了减少光照的影响)
1.result中数据的含义。
模板匹配函数cvMatchTemplate依次计算模板与待测图片的重叠区域的相似度,并将结果存入映射图像result当中,也就是说result图像中的每一个点的值代表了一次相似度比较结果。
2.result的尺寸大小。
如图可知,模板在待测图像上每次在横向或是纵向上移动一个像素,并作一次比较计算,由此,横向比较W-w+1次,纵向比较H-h+1次,从而得到一个 (W-w+1)×(H-h+1)维的结果矩阵,result即是用图像来表示这样的矩阵,因而图像result的大小为(W-w+1)×(H-h+1)。
3.如何result中获得最佳匹配区域
使用函数cvMinMaxLoc(result,&min_val,&max_val,&min_loc,&max_loc,NULL); 从result中提取最大值(相似度最高)以及最大值的位置(即在result中该最大值max_val的坐标位置max_loc,即模板滑行时左上角的 坐标,类似于图中的坐标(x,y)。)
由此得到:rect=cvRect(max_loc.x,max_loc.y,tmp->width,tmp->height);rect表示的矩形区域即是最佳的匹配区域。
确定矩形位置是使用的是max_loc,原来这个跟匹配时采用的方法参数有关,具体如下:
关于参数method:
CV_TM_SQDIFF 平方差匹配法:该方法采用平方差来进行匹配;最好的匹配值为0;匹配越差,匹配值越大。
CV_TM_CCORR 相关匹配法:该方法采用乘法操作;数值越大表明匹配程度越好。
CV_TM_CCOEFF 相关系数匹配法:1表示完美的匹配;-1表示最差的匹配。
CV_TM_SQDIFF_NORMED 归一化平方差匹配法
CV_TM_CCORR_NORMED 归一化相关匹配法
CV_TM_CCOEFF_NORMED 归一化相关系数匹配法
代码实现:
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace std;
using namespace cv;
/**********************************************************
*
* input:
* argc-----current mass center point
* argv-----previous mass center point
*
**********************************************************/
int main(int argc,char **argv)
{
Mat pFrame;//read frame from video
Mat pFrameGray;
VideoCapture pCapture;
pCapture.open("./plane.mov");
if(!pCapture.isOpened())
{
cout<<"open video error"<<endl;
return -1;
}
Mat temp;
temp = imread("./plane.png",0);//read a gray template
if(!temp.data)
{
cout<<"read template pic error"<<endl;
return -1;
}
namedWindow("template tracking");
moveWindow("template tracking",100,100);
Mat result;//save template match result
while(1)
{
pCapture.read(pFrame);//read a frame from video
cvtColor(pFrame,pFrameGray,CV_BGR2GRAY);
matchTemplate(pFrameGray,temp,result,TM_SQDIFF);
//location
double minValue;
double maxValue;
//location point
Point minLocP;
Point maxLocP;
//match locat
minMaxLoc(result,&minValue,&maxValue,&minLocP,&maxLocP,Mat());
rectangle(pFrame,Rect(minLocP.x,minLocP.y,temp.cols,temp.rows),Scalar(0,0,255),2,8,0);
imshow("template tracking",pFrame);
waitKey(33);
}
return 0;
}其中template为:

实验最后效果如下图所示

可以看出效果还是很不错的
















 1257
1257

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











