







 超级会员免费看
超级会员免费看
起人工智能机器人界的网红,那就不得不提到——“机器狗”。此前,著名机器人公司波士顿动力制造的“Spot”机器狗、国内知名科技企业蔚蓝科技自主设计研发的“阿尔法”机器狗、小米仿生四足机器人“CyberDog”都曾火爆全网。
机器狗的开发需要硬件、软件及运动行为三者达到协调,并不是一件容易的事,而在嘉立创EDA与传智教育联手举办的《仿生机器狗训练营》中,特等奖获得者刘潇翔脱颖而出,他从0-1打造了一个基于OpenAtom OpenHarmony(以下简称“OpenHarmony”)系统的机器狗,并将在本文中带来一些开发过程中的心得体会分享。
个人介绍
大家好,我是刘潇翔,现就读于南方科技大学(Southern University of Science and Technology)研一,修读的专业是智能制造与机器人。
开发项目简介
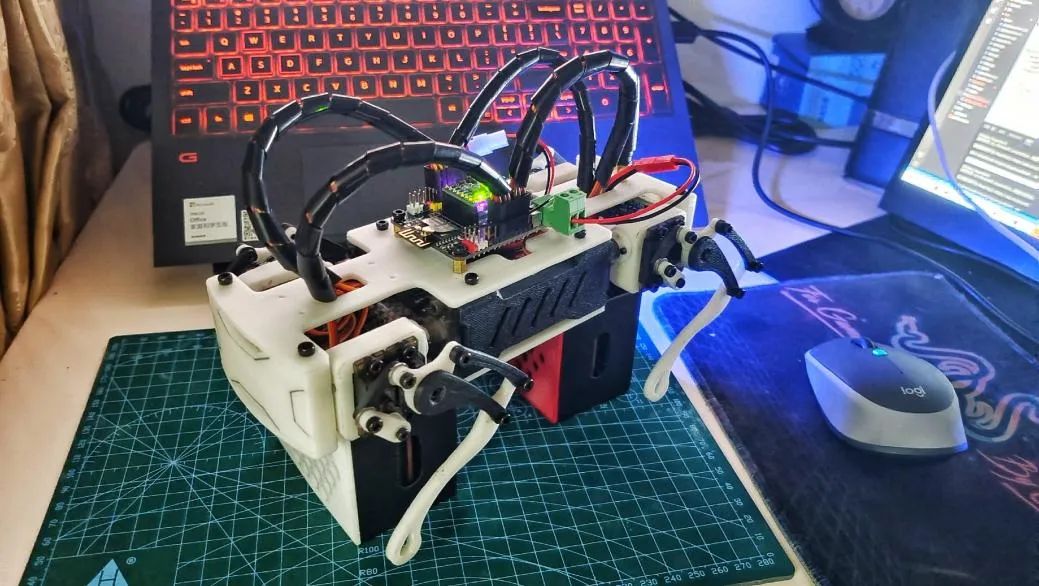
在这次训练营中,我从机械结构、电控硬件、控制算法、上位机等四个方面设计并制作了一款基于传智教育Hi3861 IoT WiFi模组主控,拥有十二自由度的桌面级四足机器狗—Puppy。

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 4523
4523

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











