






三相四桥臂逆变器MATLAB Simulink仿真模型,接不平衡负载时的调制算法。
接非线性负载时的多PR控制器并联算法。
提供仿真模型、设计报告及参考文献
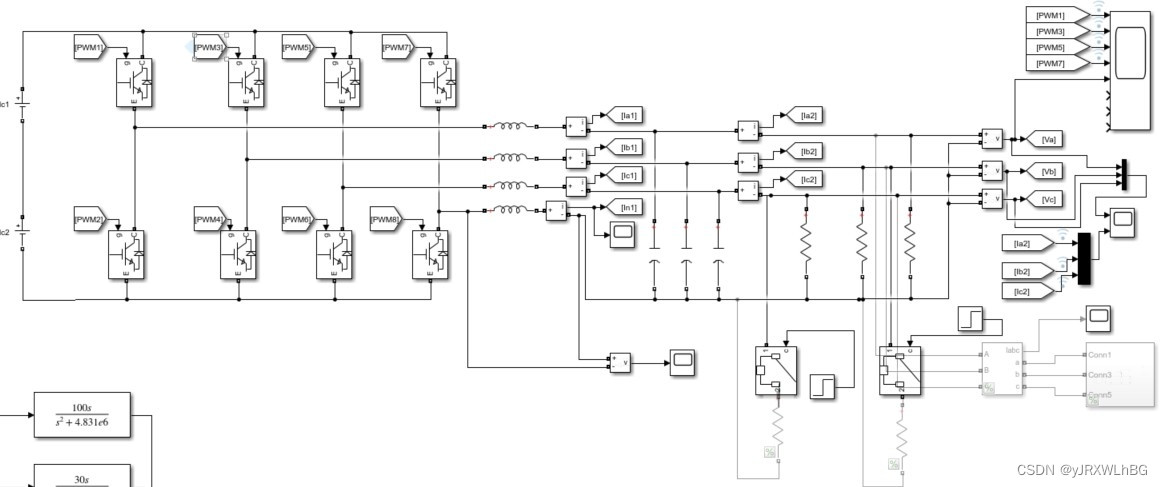
本文将要探讨的是三相四桥臂逆变器MATLAB Simulink仿真模型,并在这个基础上,介绍一种接不平衡负载时的调制算法以及在接非线性负载时的多PR控制器并联算法。同时,我们还将提供仿真模型、设计报告及参考文献,让读者们充分了解这一技术的实际应用情况和相关研究成果。
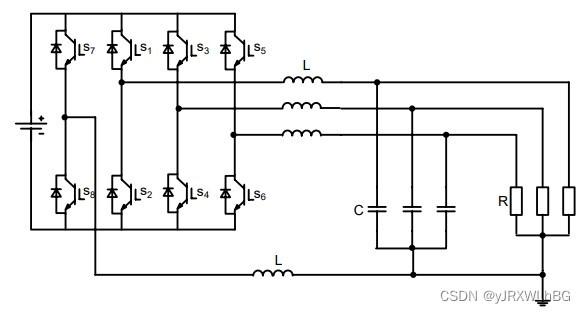
首先,让我们来了解一下什么是三相四桥臂逆变器。该逆变器是一种非常常见的电力电子器件,通过对直流电源进行调制,可以产生高质量的三相交流电源,以供各种电气设备使用。在实际应用中,我们经常需要面对非线性或不平衡的负载,因此对于逆变器的调制算法和控制器的设计都需要进行优化和升级。
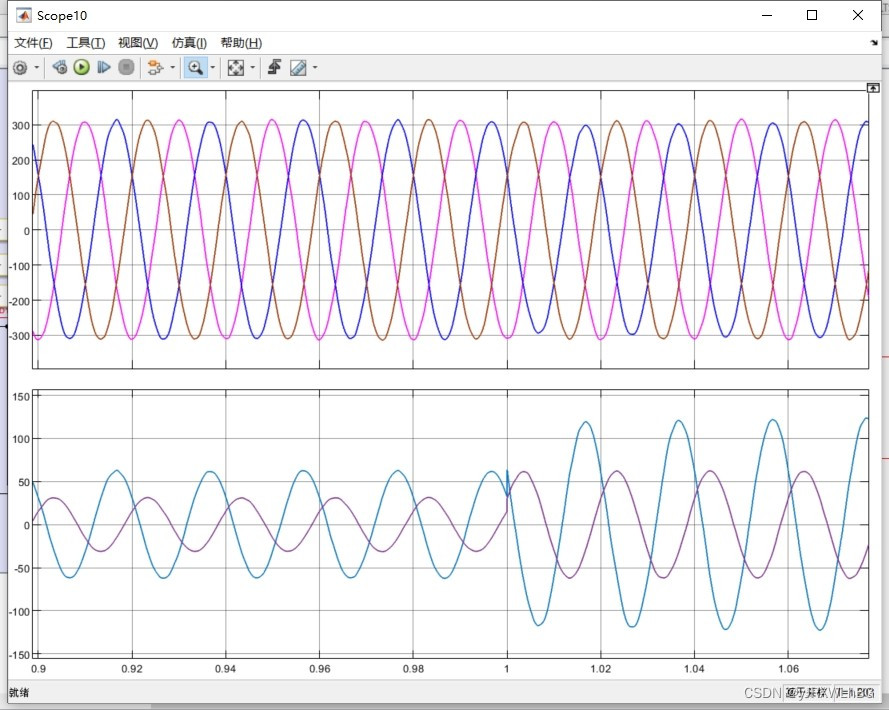
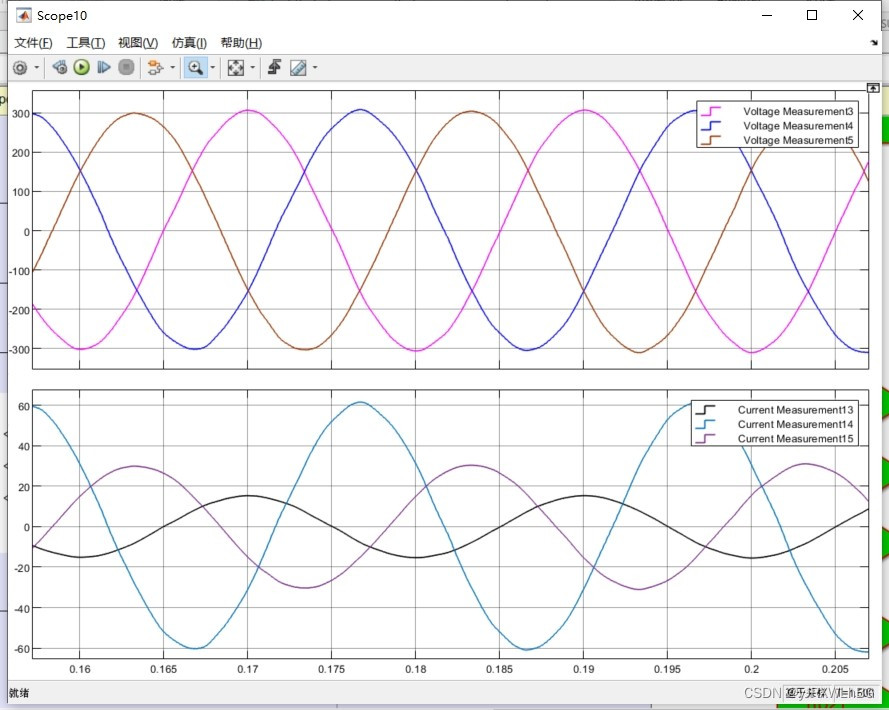
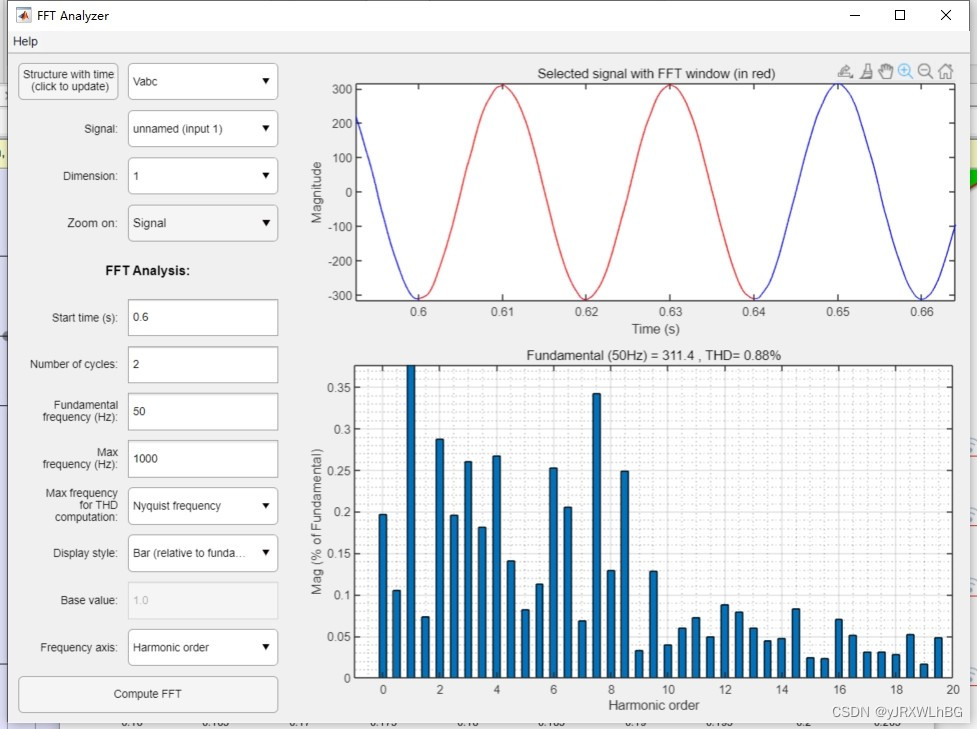
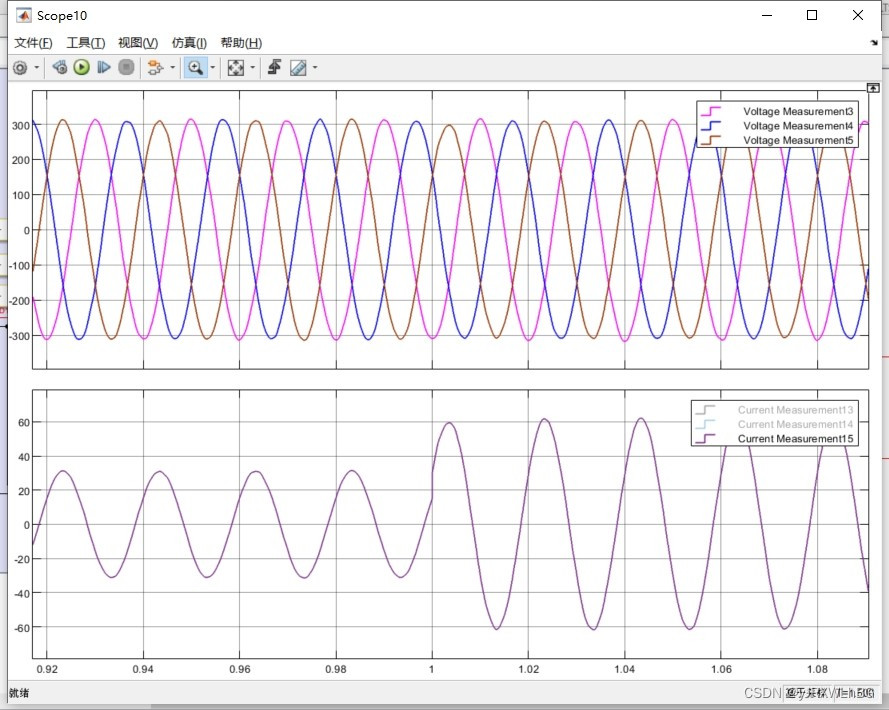
对于接不平衡负载时的调制算法,我们提出了一种改进的思路。传统的调制算法通常是基于电压平衡控制来实现的,但是在面对不平衡负载时,这种控制方式显然效果不佳。因此,我们提出了一种基于电流平衡控制的新算法。具体来说,通过对各桥臂输出电流进行动态调整,可以实现对负载电流的平衡控制。仿真模型的结果表明,该算法可以有效地降低负载端电流的不平衡度,提高逆变器的稳定性和性能表现。
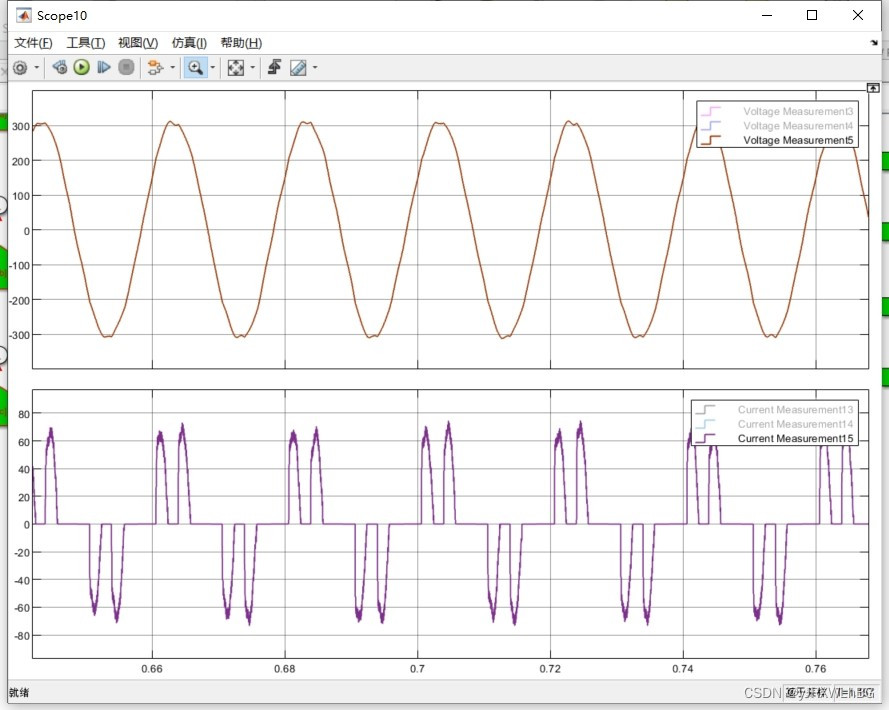
当逆变器面对非线性负载时,我们可以采用多PR控制器并联算法来提高逆变器的控制精度和输出质量。通常情况下,我们需要在逆变器输出端并联一个稳压器,以对逆变器输出电压进行调节。然而,仅仅依靠稳压器是难以实现非线性负载的精确控制的。因此,我们提出了一种多PR控制器并联的算法,通过对多个负载进行分时段控制,可以实现对非线性负载的精确控制,并有效地提高逆变器的输出质量。
最后,我们为读者提供了详细的仿真模型、设计报告及参考文献,希望能够为读者们更深入地了解这一技术提供参考和帮助。我们相信,在这个不断变化和升级的时代,只有不断创新和优化,才能不断提高电气设备的稳定性和性能表现。
相关代码,程序地址:http://lanzouw.top/688346998372.html


















 332
332

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









