






foc滑膜观测器(SMO+PLL)matlab模型,仿真里面是直接0速闭环启动的效果,当然这是仿真,应用到硬件肯定要加开环启动,目前已经在M4的硬件中实现了,效果还不错,现在出这个模型,matlab 的版本是2021b
ID:4820703072414408
爱吃清蒸平鱼的飞飞79
标题:基于FOC滑膜观测器的SMO+PLL Matlab模型仿真与实现分析
摘要:
本文通过基于FOC滑膜观测器的SMO+PLL Matlab模型仿真与实现分析,探讨了该模型在闭环启动效果和硬件应用方面的表现。通过仿真结果验证了0速闭环启动的有效性,并在实际硬件中进行了验证,取得了良好的效果。本文旨在为在实际应用中采用该模型提供参考。
-
引言
FOC(Field Oriented Control)技术作为一种针对永磁同步电机的控制方法,已经广泛应用于工业控制领域。其中,滑膜观测器(Sliding Mode Observer)和PLL(Phase Locked Loop)是FOC技术中常用的核心模块。本文将重点讨论FOC滑膜观测器结合PLL在Matlab仿真和硬件实现过程中的性能分析和效果评估。 -
FOC滑膜观测器和PLL原理
2.1 FOC滑膜观测器原理
FOC滑膜观测器是一种基于滑模控制理论的非线性观测器,用于估计电机的未测量状态量,如电机轴角度、负载扭矩等。本节对FOC滑膜观测器的原理进行详细介绍,并阐明其在FOC控制中的作用和优势。2.2 PLL原理
PLL是一种常用的同步调节方法,用于提取电机轴角度信息。本节将对PLL的基本原理进行阐述,并介绍其在FOC控制中的应用场景和优化方法。 -
FOC滑膜观测器(SMO)和PLL在Matlab仿真中的效果评估
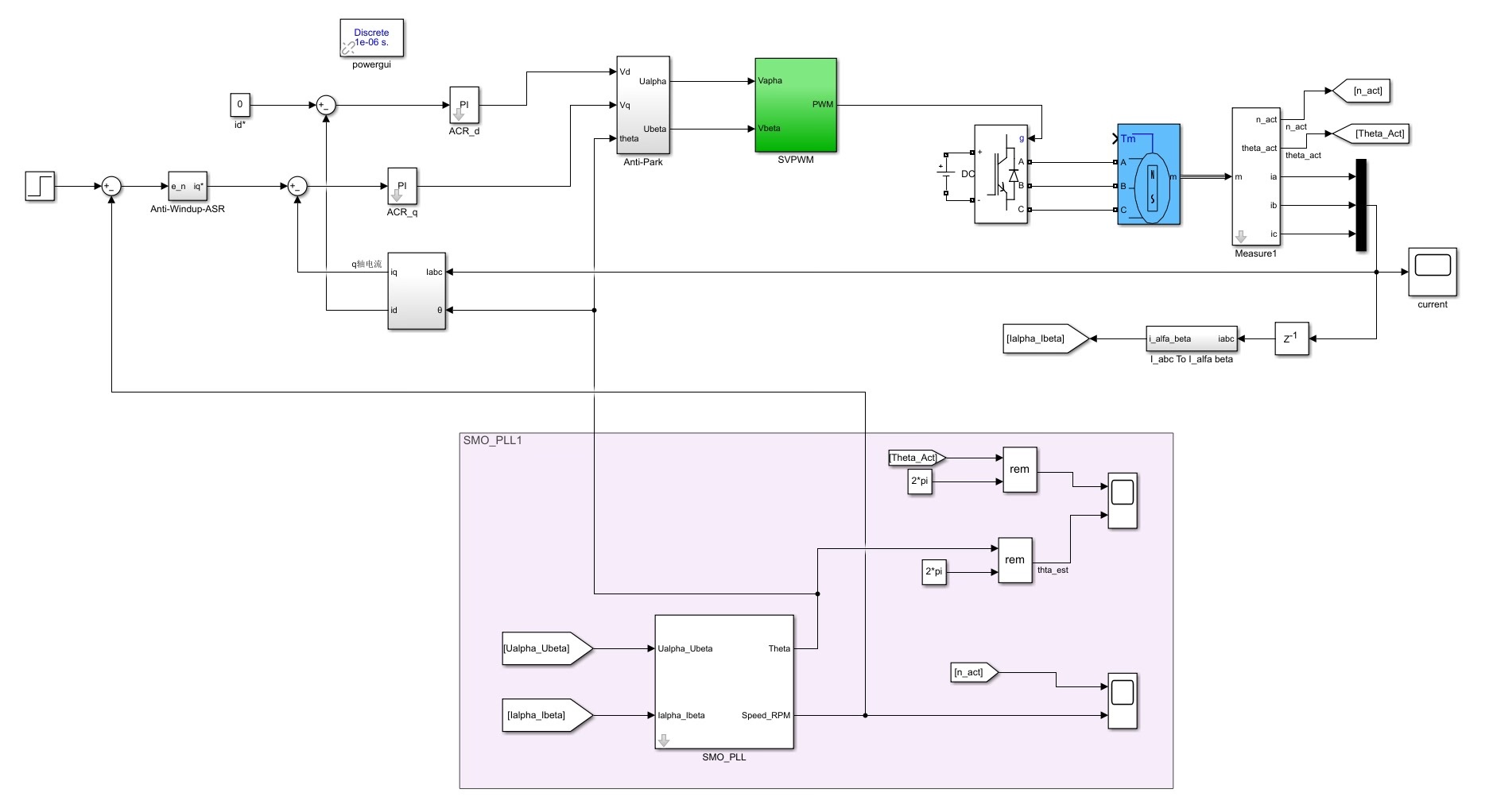
3.1 Matlab模型搭建
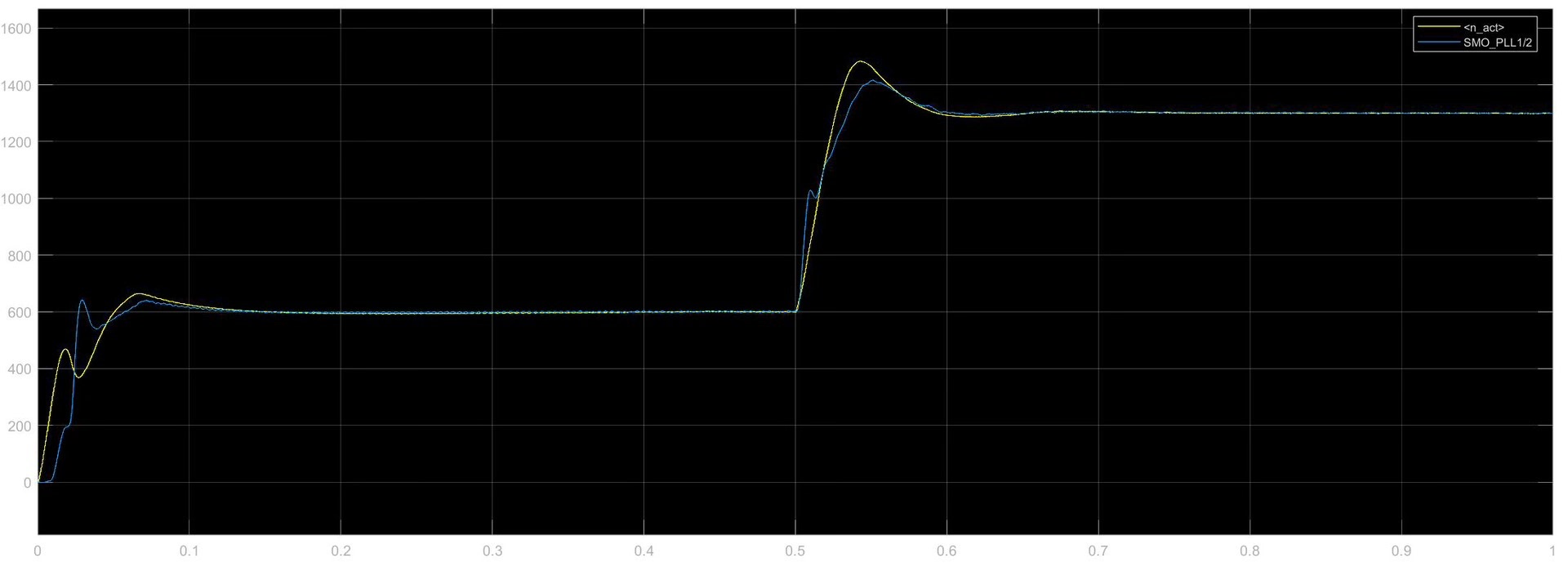
根据FOC滑膜观测器和PLL的原理,我们在Matlab环境中搭建了相应的模型。本节将介绍模型搭建的步骤和关键参数设置,并通过仿真结果评估0速闭环启动效果以及系统的响应性能。3.2 仿真结果分析
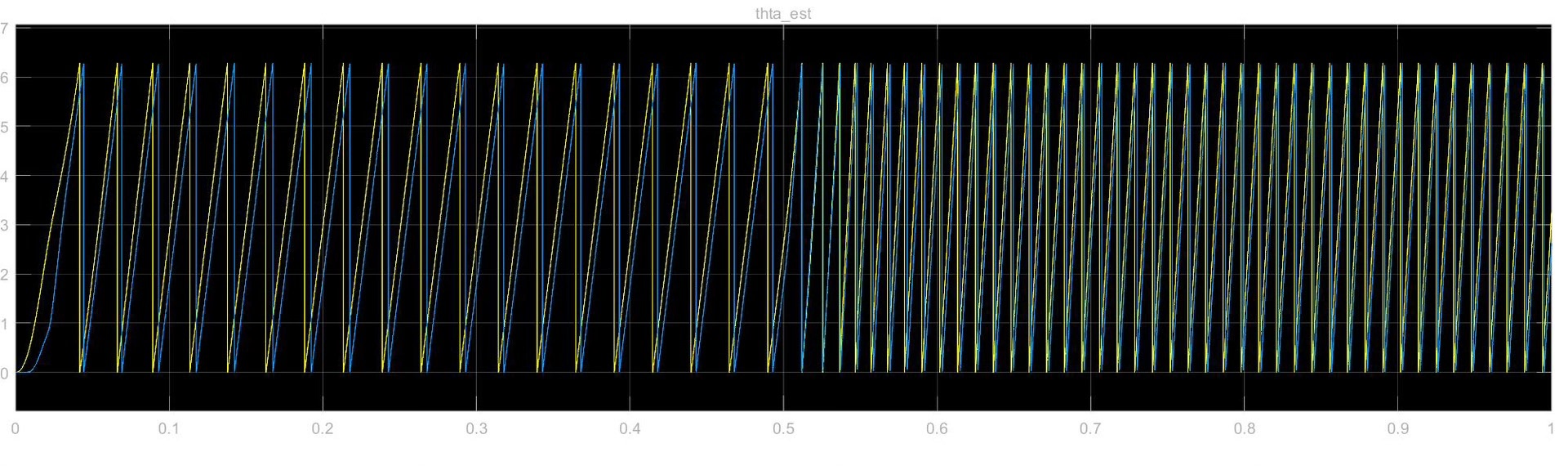
在本节中,我们将针对FOC滑膜观测器和PLL模型的仿真结果进行详细分析。通过分析闭环启动时间、定位精度和系统稳定性等方面的指标,综合评估该模型在Matlab仿真中的表现。 -
FOC滑膜观测器(SMO)和PLL在硬件中的实现
4.1 硬件平台介绍
本节将介绍使用M4的硬件平台进行FOC滑膜观测器和PLL模型的实际验证。对硬件平台的架构、特性和接口进行简要介绍。4.2 硬件实现过程
根据实际硬件平台的特点和要求,我们对FOC滑膜观测器和PLL模型进行了适配和优化,并进行了详细的实施过程介绍。4.3 实验结果与分析
本节将针对实际硬件实现的FOC滑膜观测器(SMO)和PLL模型的实验结果进行评估与分析。通过对实验结果的比较和详细分析,探讨该模型在硬件环境中的性能和可行性。 -
结论
通过对FOC滑膜观测器(SMO)和PLL在Matlab仿真和硬件实现中的分析,本文验证了该模型的有效性和可行性。该模型在闭环启动效果和硬件应用方面取得了良好的结果,为进一步的实际应用提供了参考和借鉴。 -
展望
针对FOC滑膜观测器(SMO)和PLL模型在硬件应用中的一些限制和不足,本节对未来研究方向和优化方案进行了展望,并提出了一些改进和扩展的建议。
关键词:FOC, 滑膜观测器, SVM, PLL, Matlab模型, 闭环启动, 硬件实现
【相关代码 程序地址】: http://nodep.cn/703072414408.html















 587
587











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









