







随着3D打印技术在制造业、医疗和航空航天等领域的广泛应用,其质量控制成为影响产品性能和安全性的关键因素。传统的缺陷检测方法通常依赖于人为经验或特定的检测设备,存在效率低、成本高和检测精度受限的问题。为此,本文提出了一种基于深度学习的打印缺陷检测系统,通过先进的目标检测算法,实现对打印缺陷的实时、高效、精准检测。
一、系统概述
1. 系统结构
系统由以下模块组成:
-
数据采集模块:使用高清相机或工业相机采集3D打印件的表面图像。多角度拍摄确保全面覆盖目标区域。
-
数据预处理模块:对图像进行去噪、对比度调节等增强处理,增强缺陷区域特征,并对裂纹、孔洞、翘曲等缺陷进行标注,生成标准数据集。
-
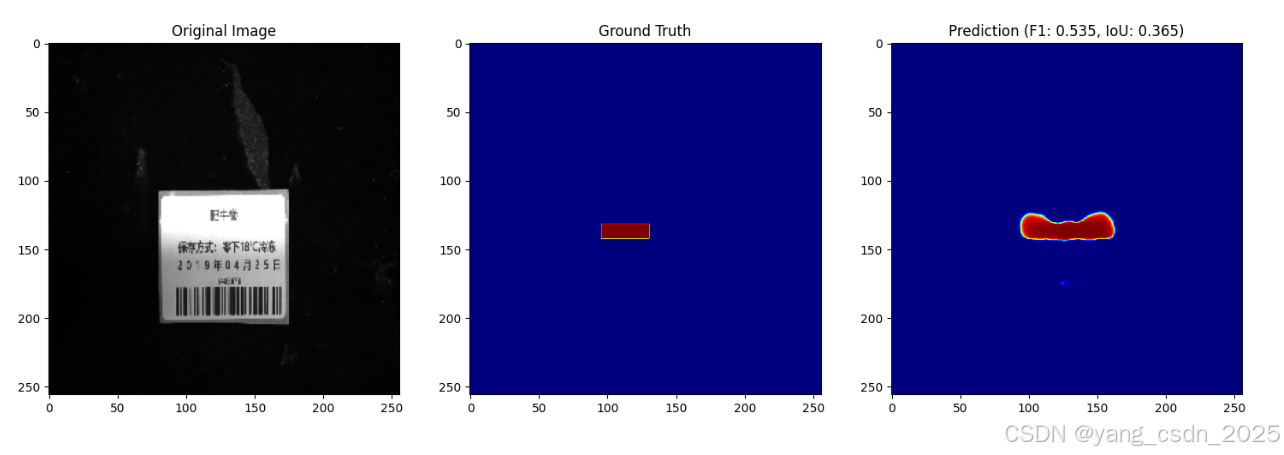
缺陷检测模型:使用标注数据集对深度学习模型进行训练,调整模型参数以适应缺陷的特征,实现缺陷区域的精准定位和分类。
-
实时监控与报警模块:部署在打印设备的生产线上,实时捕获图像并检测缺陷,通过警报或显示界面提示操作员处理缺陷。
-
结果记录与分析模块:将检测结果存储于数据库,提供缺陷统计与趋势分析,支持质量改进决策。

2. 系统优势
-
多场景适应:适应多种复杂场景,如光照变化、纹理干扰。
-
高效检测:兼顾检测速度与精度,适用于实时质量监控。
-
迁移学习能力:易于扩展到新材料和新设备。
二、核心模型
1. enhanced U-Net
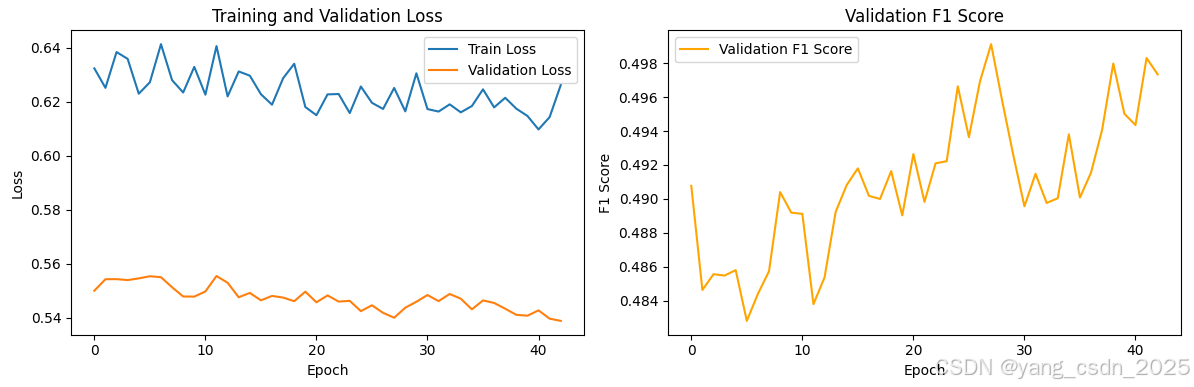
enhanced U-Net是一种改进的U-Net模型,通过结合注意力机制提高模型对缺陷区域的关注能力,从而提高检测精度。该模型在训练过程中应用了综合损失函数,既利用了Focal Loss对难分类样本的关注,又利用了Dice Loss对分割边界的优化。
class EnhancedUNet(nn.Module):
def __init__(self):
super().__init__()
features = Config.init_featuresself._initialize = nn.init.kaiming_normal_
# 编码器
self.encoder1 = self._build_block(Config.in_channels, features)
self.pool1 = nn.MaxPool2d(2)
self.encoder2 = self._build_block(features, features * 2)
self.pool2 = nn.MaxPool2d(2)
self.encoder3 = self._build_block(features * 2, features * 4)
self.pool3 = nn.MaxPool2d(2)
self.encoder4 = self._build_block(features * 4, features * 8)
self.pool4 = nn.MaxPool2d(2)# 瓶颈层
self.bottleneck = self._build_block(features * 8, features * 16)# 解码器
self.upconv4 = nn.ConvTranspose2d(fe
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









