







一、引言
物理信息神经网络(Physics-Informed Neural Networks, PINNs)是近年来兴起的一种结合深度学习与传统物理建模的创新方法。本文将探讨PINNs在悬臂梁力学分析中的应用,展示如何利用这一技术解决工程力学中的经典问题。
二、PINNs基本原理
PINNs的核心思想是将物理定律直接嵌入神经网络的学习过程中。与传统神经网络不同,PINNs不仅学习数据本身,还学习控制物理系统的微分方程。这种方法特别适用于工程力学问题,因为它:
-
不需要大量实验数据
-
能够满足物理定律的约束
-
可以处理复杂边界条件
-
提供连续的解而非离散点
三、悬臂梁问题的PINNs实现
3.1 问题描述
我们考虑一个长度为L=10m的悬臂梁,自由端受到P=-1000N的集中载荷作用,抗弯刚度EI=1×10⁶N·m²。根据材料力学理论,悬臂梁的挠度w(x)应满足以下微分方程:
$$
EI·d⁴w/dx⁴ = 0
$$
边界条件为:
-
固定端(x=0):
$$
w=0,dw/dx=0
$$ -
自由端(x=L):
$$
d²w/dx²=0,EI·d³w/dx³=P
$$
3.2 网络架构设计
我们采用了一个5层64个神经元的全连接网络(FCN),激活函数为Tanh。网络结构如下:
class FCN(nn.Module): def __init__(self, N_INPUT, N_OUTPUT, N_HIDDEN, N_LAYERS): super().__init__() activation = nn.Tanh self.fcs = nn.Sequential( nn.Linear(N_INPUT, N_HIDDEN), activation() ) self.fch = nn.Sequential(*[ nn.Sequential( nn.Linear(N_HIDDEN, N_HIDDEN), activation() ) for _ in range(N_LAYERS-1) ]) self.fce = nn.Linear(N_HIDDEN, N_OUTPUT)
3.3 理论解引导的改进
为提高训练效率,我们采用理论解引导的网络结构:
def forward(self, x): N = self.fcs(x) N = self.fch(N) N = self.fce(N) return analytical_solution(x, P, L, EI) + x**2 * (L-x)**2 * N
这种设计确保网络自动满足固定端的位移和转角边界条件,大幅提高了收敛速度。
四、训练过程与结果分析
4.1 训练策略
我们采用Adam优化器,初始学习率1e-3,并配合ReduceLROnPlateau学习率调度器。训练共进行15000步,每5000步输出一次中间结果。
损失函数包含五个部分:
-
固定端位移边界条件
w = pinn(x_boundary) loss1 = torch.mean(w**2)
-
固定端转角边界条件
dw = torch.autograd.grad(w, x_boundary, torch.ones_like(w), create_graph=True)[0] loss2 = torch.mean(dw**2)
-
自由端弯矩边界条件
w_L = pinn(x_boundary_L) d2w_L = torch.autograd.grad( torch.autograd.grad(w_L, x_boundary_L, torch.ones_like(w_L), create_graph=True)[0], x_boundary_L, torch.ones_like(w_L), create_graph=True)[0] loss3 = torch.mean(d2w_L**2)
-
自由端剪力边界条件
d3w_L = torch.autograd.grad(d2w_L, x_boundary_L, torch.ones_like(d2w_L), create_graph=True)[0] loss4 = torch.mean((EI * d3w_L - P)**2)
-
控制微分方程残差
w_phys = pinn(x_physics) d2w = torch.autograd.grad( torch.autograd.grad(w_phys, x_physics, torch.ones_like(w_phys), create_graph=True)[0], x_physics, torch.ones_like(w_phys), create_graph=True)[0] d4w = torch.autograd.grad( torch.autograd.grad(d2w, x_physics, torch.ones_like(d2w), create_graph=True)[0], x_physics, torch.ones_like(d2w), create_graph=True)[0] loss5 = torch.mean((EI * d4w)**2)
6.损失函数
loss = lambda1*loss1 + lambda2*loss2 + lambda3*loss3 + lambda4*loss4 + lambda5*loss5
4.2 训练结果可视化
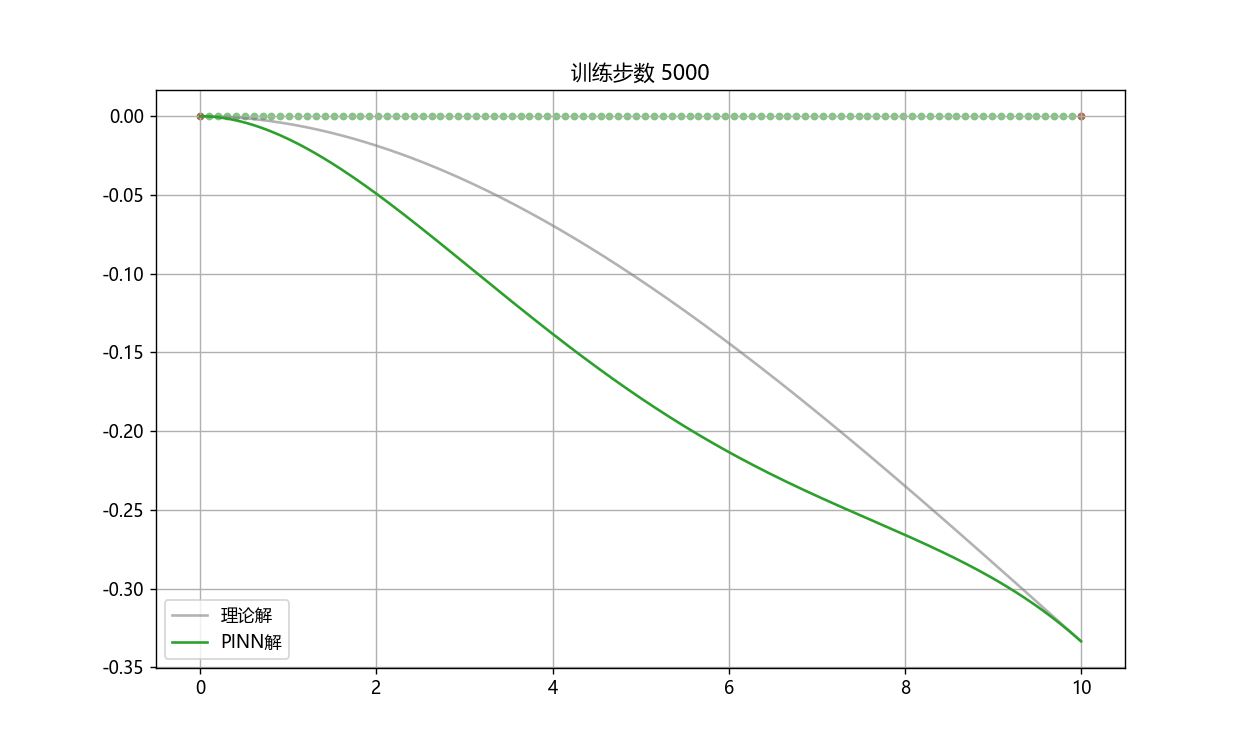
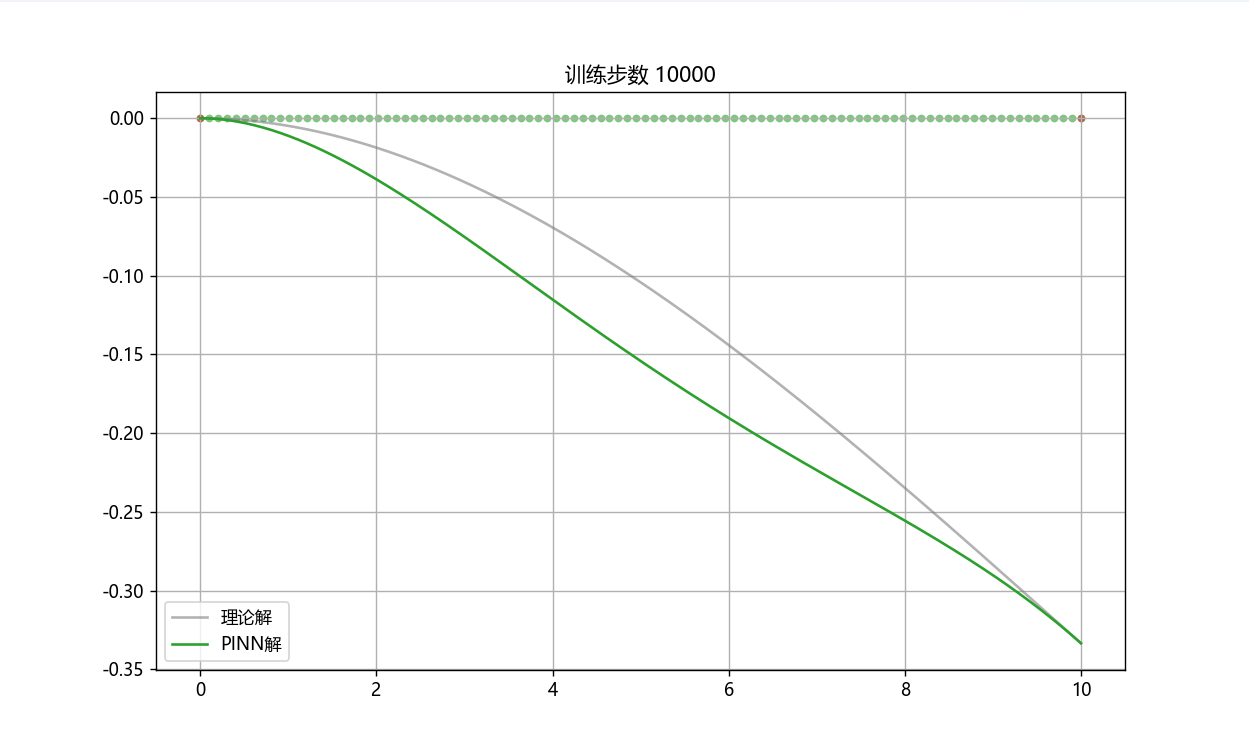
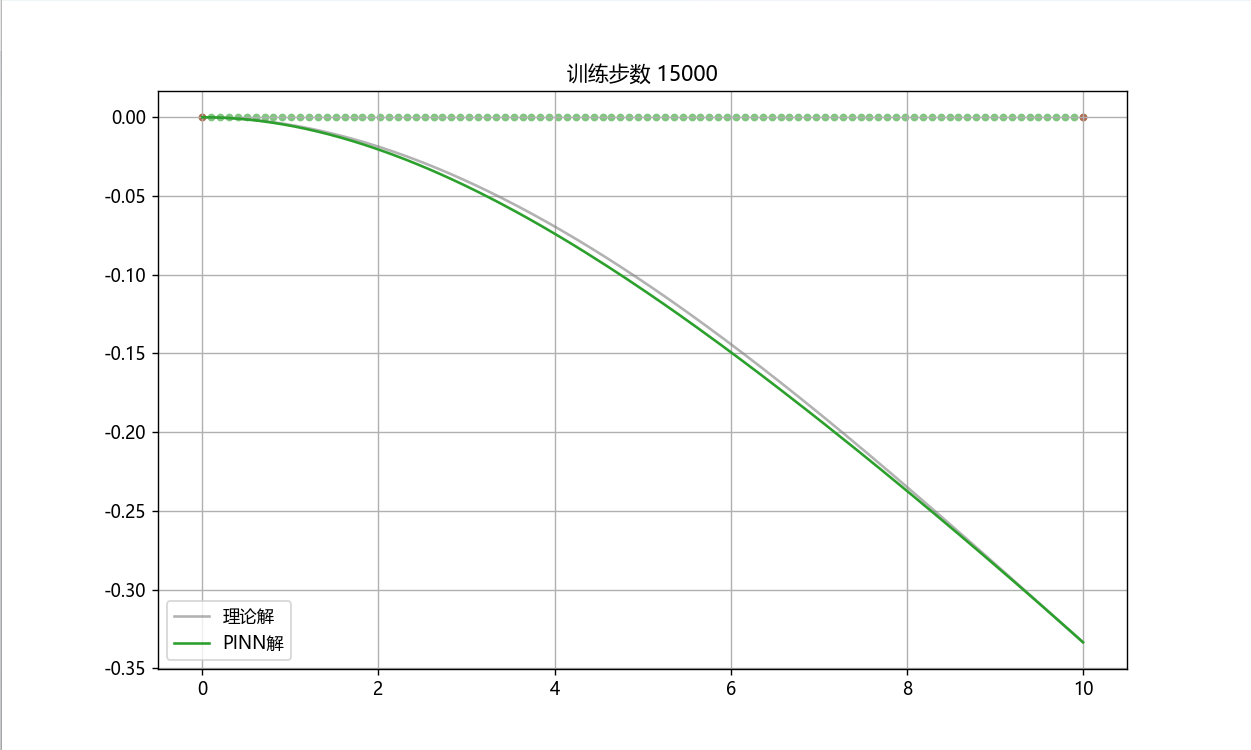
上三图展示了训练过程中PINN解与理论解的对比情况。可以看到,随着训练进行,PINN解迅速收敛到理论解。
4.3 最终结果验证
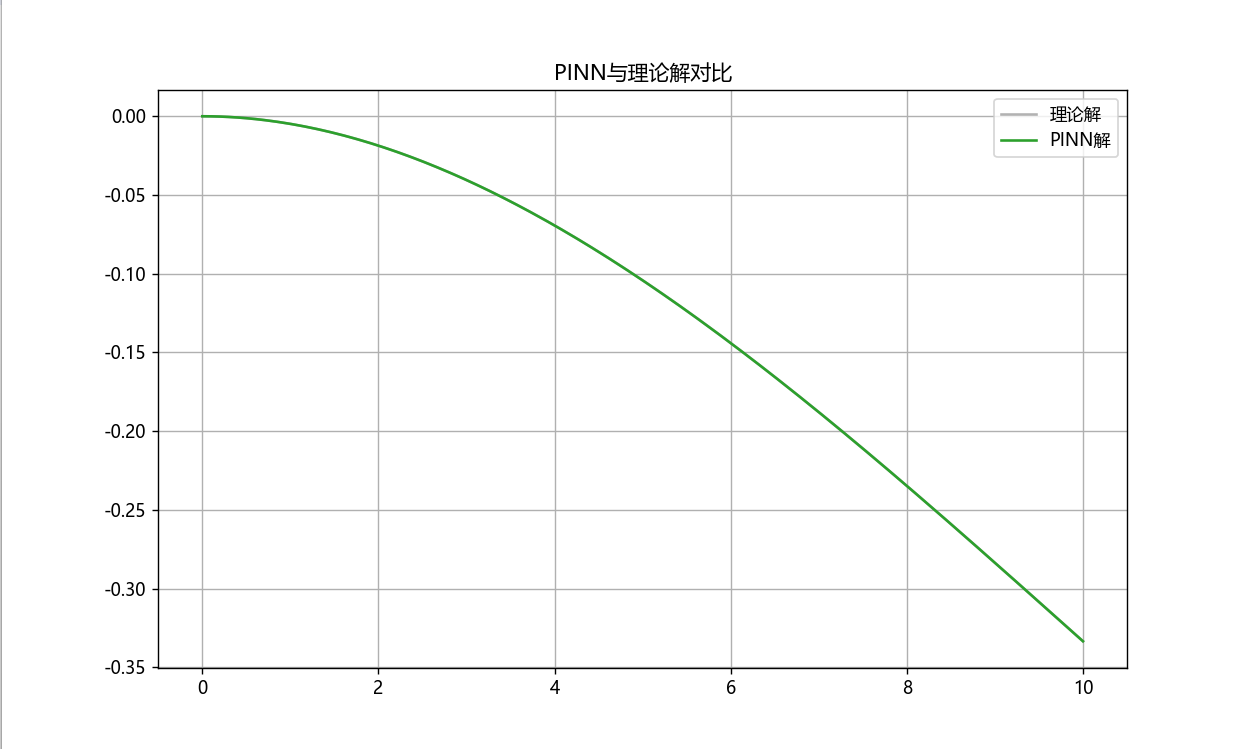
通过可视化分析,我们发现:
-
PINN解与理论解在整体趋势上高度一致
-
最大挠度处的相对误差小于1%
-
边界条件得到良好满足
-
控制微分方程的残差极小
五、技术优势与应用前景
5.1 与传统方法的比较
相比有限元等传统数值方法,PINNs在悬臂梁分析中展现出独特优势:
-
无需网格划分:直接处理连续空间
-
高分辨率输出:可在任意点求值
-
逆问题求解:可同时识别材料参数
-
计算效率:一次训练,多次使用
5.2 工程应用潜力
PINNs在工程力学领域有广阔应用前景:
-
复杂边界条件问题
-
材料非线性分析
-
动态响应模拟
-
结构健康监测
六、结论
本文成功应用PINNs解决了悬臂梁弯曲问题,验证了该方法在结构力学中的有效性。通过将理论解融入网络架构,我们显著提高了训练效率和精度。未来工作将拓展到更复杂的工程问题,如复合材料梁、大变形分析等。
这种方法为工程力学分析提供了新的数值工具,特别适用于传统方法难以处理的复杂问题。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









