






1.硬件型号
轴卡:PCI1245L 接线板:ADAM3956 伺服驱动器:ASD-A2-0421-U 400W
2.所需软件
轴卡软件:Advantech Common Motion Driver & Utility_20190304.exe

伺服驱动器软件:DELTA_IA-ASDA_ASDA-Soft-V5-4-1-0_SW_TSE_20191008.exe

3.安装及接线
3.1轴卡在工控机断电情况下插入PCI插槽并安装轴卡软件
3.2用CN1线缆把轴卡与接线板连接
3.3接线板CN2 +VEX接24V -VEX接0V,接线板上所有+VEX内部短路,所有-VEX内部短路
3.4安装伺服驱动器软件,并连接好用于PC和伺服驱动器直接通信的方口USB线缆

4.伺服驱动器侧的设置
| 参数序号 | 设置值 | 说明 | 备注 |
| P0-02 | 1 | 脉波命令输入脉波数 | |
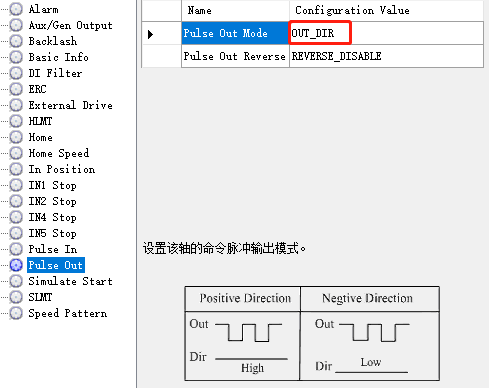
| P1-00 | 1102 | 右侧起2:脉冲+方向;0:可接受滤波宽度为6.6Mpps以下;1:负逻辑(改变方向用);1:外部脉冲输入为高速差动(与伺服驱动器线缆有关,取决于硬件) | 如果方向设置不当会导致【位置】命令与反馈相反叠加;Pulse Out轴卡输出Pulse Out Mode参数为OUT_DIR |
| P1-01 | 0 | 控制模式Pt:位置控制模式,外部脉冲输入 | |
| P2-10 | 101 | 当DI0=On时,伺服启动 | |
| P2-11 | 104 | 当DI0=On时,清除脉冲计数寄存器 | |
| P2-18 | 101 | 当伺服启动准备完毕,DO1=On | |
| P2-19 | 103 | 当伺服电机转速为零时,DO2=On | |
| P2-20 | 109 | 当伺服完成原点回归后,DO3=On | |
| P2-21 | 105 | 当伺服达到目标位置后,DO4=On | |
| P2-22 | 107 | 当伺服报警时,DO5=On | 如果为7,结果取反,现象就是ALM灯常亮 |
| P1-44 | 128 | 电子齿轮比分子 | 这里用默认,与Utility【Basic Info】PPU(分子)和PPU Demoninator对应,如果设置不当,会导致【位置】命令与反馈不一致 |
| P1-45 | 1 | 电子齿轮比分母 |
5.轴卡侧设置


6.PPU

7.松下A5驱动器
驱动器侧设置如下表
| 伺服驱动参数编号 | 设定值 |
| 0 | 0 |
| 0.01* | 0 |
| 0.02 | 2 |
| 0.03 | 16 |
| 0.04 | 1000 |
| 0.05 | 1 |
| 0.06 | 0 |
| 0.07 | 3 |
8.















 1640
1640











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









