







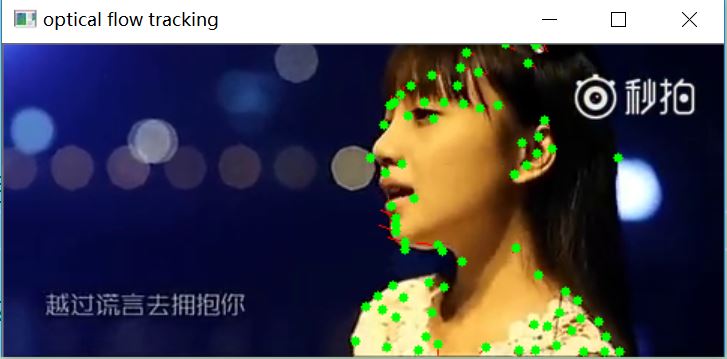
题目:Opencv中利用光流法对物体进行检测
完整代码实现:
#include <opencv2/video/video.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/core/core.hpp>
#include <iostream>
#include <cstdio>
using namespace std;
using namespace cv;
void tracking(Mat &frame, Mat &output);
bool addNewPoints();
bool acceptTrackedPoint(int i);
string window_name = "optical flow tracking";
Mat gray; // 当前图片
Mat gray_prev; // 预测图片
vector<Point2f> points[2]; // point0为特征点的原来位置,point1为特征点的新位置
vector<Point2f> initial; // 初始化跟踪点的位置
vector<Point2f> features; // 检测的特征
int maxCount = 500; // 检测的最大特征数
double qLevel = 0.01; // 特征检测的等级
double minDist = 10.0; // 两特征点之间的最小距离
vector<uchar> status; // 跟踪特征的状态,特征的流发现为1,否则为0
vector<float> err;
int main()
{
Mat frame;
Mat result;
VideoCapture capture("E:\\code\\y.mp4");
if (capture.isOpened()) // 摄像头读取文件开关
{
while (true)
{
capture >> frame;
if (!frame.empty())
{
tracking(frame, result);
}
else
{
printf(" --(!) No captured frame -- Break!");
break;
}
int c = waitKey(50);
if ((char)c == 27)
{
break;
}
}
}
return 0;
}
//-------------------------------------------------------------------------------------------------
// function: tracking
// brief: 跟踪
// parameter: frame 输入的视频帧
// output 有跟踪结果的视频帧
// return: void
//-------------------------------------------------------------------------------------------------
void tracking(Mat &frame, Mat &output)
{
cvtColor(frame, gray, COLOR_BGR2GRAY);
frame.copyTo(output);
// 添加特征点
if (addNewPoints())
{
goodFeaturesToTrack(gray, features, maxCount, qLevel, minDist);
points[0].insert(points[0].end(), features.begin(), features.end());
initial.insert(initial.end(), features.begin(), features.end());
}
if (gray_prev.empty())
{
gray.copyTo(gray_prev);
}
// l-k光流法运动估计
calcOpticalFlowPyrLK(gray_prev, gray, points[0], points[1], status, err);
// 去掉一些不好的特征点
int k = 0;
for (size_t i = 0; i<points[1].size(); i++)
{
if (acceptTrackedPoint(i))
{
initial[k] = initial[i];
points[1][k++] = points[1][i];
}
}
points[1].resize(k);
initial.resize(k);
// 显示特征点和运动轨迹
for (size_t i = 0; i<points[1].size(); i++)
{
line(output, initial[i], points[1][i], Scalar(0, 0, 255));
circle(output, points[1][i], 3, Scalar(0, 255, 0), -1);
}
// 把当前跟踪结果作为下一此参考
swap(points[1], points[0]);
swap(gray_prev, gray);
imshow(window_name, output);
}
//-------------------------------------------------------------------------------------------------
// function: addNewPoints
// brief: 检测新点是否应该被添加
// parameter:
// return: 是否被添加标志
//-------------------------------------------------------------------------------------------------
bool addNewPoints()
{
return points[0].size() <= 10;
}
//-------------------------------------------------------------------------------------------------
// function: acceptTrackedPoint
// brief: 决定哪些跟踪点被接受
// parameter:
// return:
//-------------------------------------------------------------------------------------------------
bool acceptTrackedPoint(int i)
{
return status[i] && ((abs(points[0][i].x - points[1][i].x) + abs(points[0][i].y - points[1][i].y)) > 2);
}















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









